実験工程をつなぐラボオートメーション基盤『Tsubame Studio』をオープンソース公開
ロボットアーム・周辺機器・測定機器を連携し、実験操作からデータ取得・解析までを支援する制御ソフトウェア
Tsubame Lab 株式会社(本社:東京都文京区、代表取締役 CEO:楢崎 鴻司朗、以下「Tsubame Lab」)
は〔2026/6/30〕、ラボオートメーションに特化した制御ソフトウェア『Tsubame Studio』を、オープンソースソフトウェアとして無償公開します。
『Tsubame Studio』は、ロボットアームだけでなく、グリッパ、電動ピペット、搬送機構、測定機器など、実験現場で使用されるさまざまな装置を接続・制御するためのラボオートメーション基盤ソフトウェアです。ブラウザ上の GUI から直感的に操作でき、ビジュアルプログラミング、Python スクリプト実行、スマートフォンを用いたジョグ操作に対応しています。
専門的なプログラミング知識がないユーザーでも、ロボットアームや周辺機器を組み合わせた実験・作業プロセスの自動化に取り組むことができます。さらに、測定機器との連携により、実験操作だけでなく、データの取得・記録・解析までを見据えた自動化環境の構築を支援します。
ソースコードは GitHub 上で公開します。公式サイト(https://www.tsubamelab.com/studio/control)から GitHub ユーザー名をご登録いただくことでリポジトリへアクセスでき、無償でご利用・改変いただけます。あわせて、インストールや初期設定をより簡素化したデスクトップアプリ版(有償提供を予定)の開発も進めており、近日中のリリースを予定しています〔2026年8月予定〕。オープンソース版を起点に、より多くの研究者・開発者がラボオートメーションに取り組める環境づくりを進めていきます。
背景 ─ ラボオートメーションの普及を阻む「接続」と「運用」の壁
研究・開発の現場では、実験の再現性向上、作業負荷の軽減、データ取得の効率化を目的に、ラボオートメーションへの関心が高まっています。一方で、実際にロボットや実験装置を導入し、日々の研究業務の中で活用するには、いくつものハードルが存在します。
多くの実験工程は、ロボットアーム単体で完結するものではありません。サンプルを搬送し、グリッパや電動ピペットで処理を行い、測定機器でデータを取得し、その結果を記録・解析するまで、複数の装置やソフトウェアが連携して初めて自動化が成立します。
しかし、既存のロボット制御ソフトウェアは特定のメーカーや機種に依存するものが多く、周辺機器や測定機器を含めた実験工程全体を統一的に扱う環境を構築することは容易ではありませんでした。装置ごとに異なる通信仕様や制御方法に対応するには、プログラミング、ロボット制御、実験プロトコル、データ処理にまたがる専門知識が必要になります。
Tsubame Lab は、ロボット・周辺機器・測定機器をつなぎ、実験工程全体をより簡単に自動化できる基盤の開発を進めてきました。今回の『Tsubame Studio』のオープンソース公開は、ラボオートメーションを一部の専門家だけのものではなく、研究者・学生・エンジニアが自ら試し、改善し、活用できる技術基盤として広げていくための第一歩です。
今回公開する内容(公開範囲)
今回のオープンソース公開では、中核制御機能(ロボット接続・GUI 操作・ビジュアルプログラミング・Python 実行・安全機構・周辺機器制御・実行ログ/プログラム版管理)を無償で公開します。AI によるコード自動生成、クラウド連携・実行ジョブ管理などの高度機能は今後別途提供予定です。
本 OSS 版はすべて無償でご利用いただけます。 プログラミングの専門知識がなくても、対応するロボットアームさえあれば自分の手で動かして試せます。

主な特徴
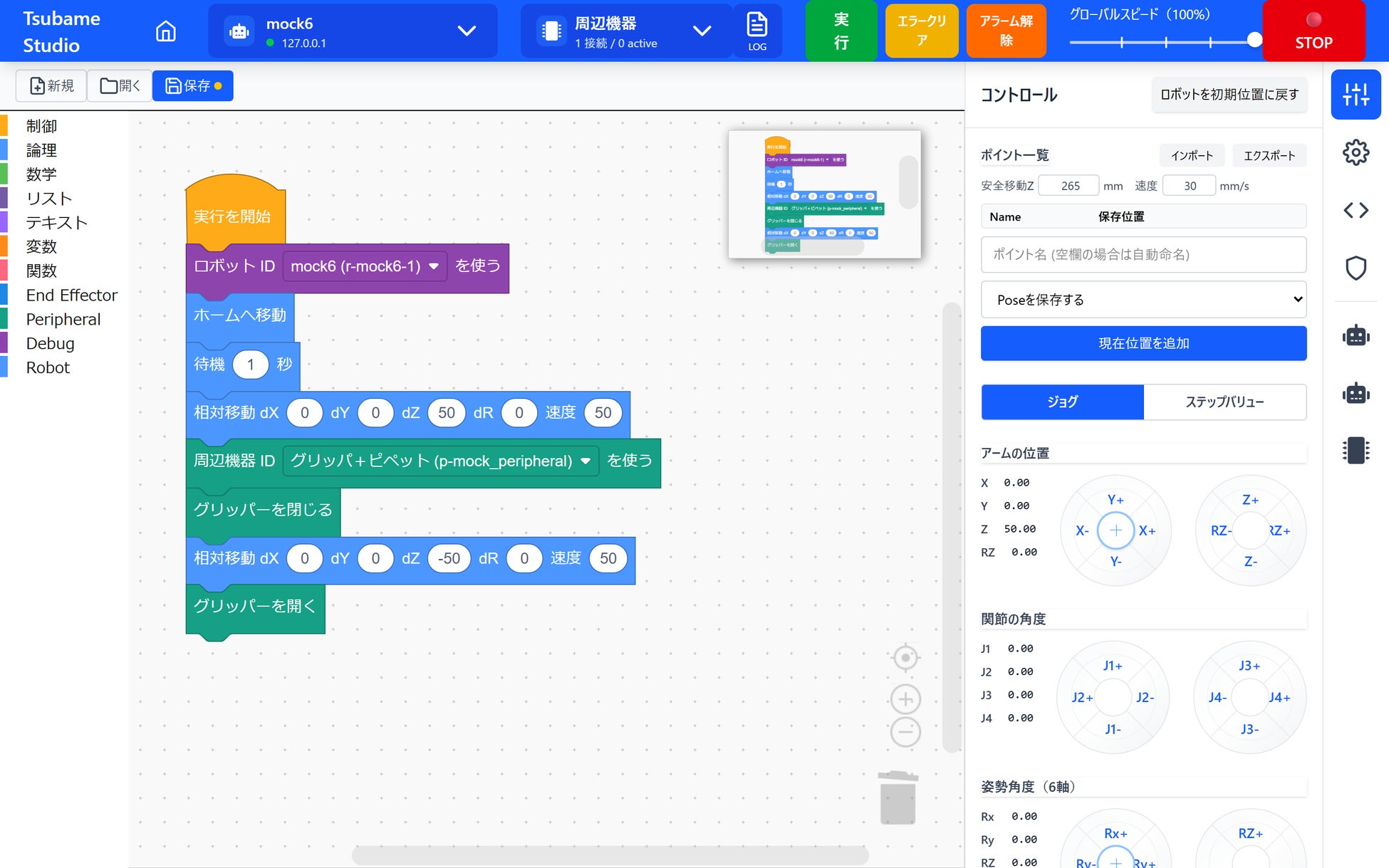
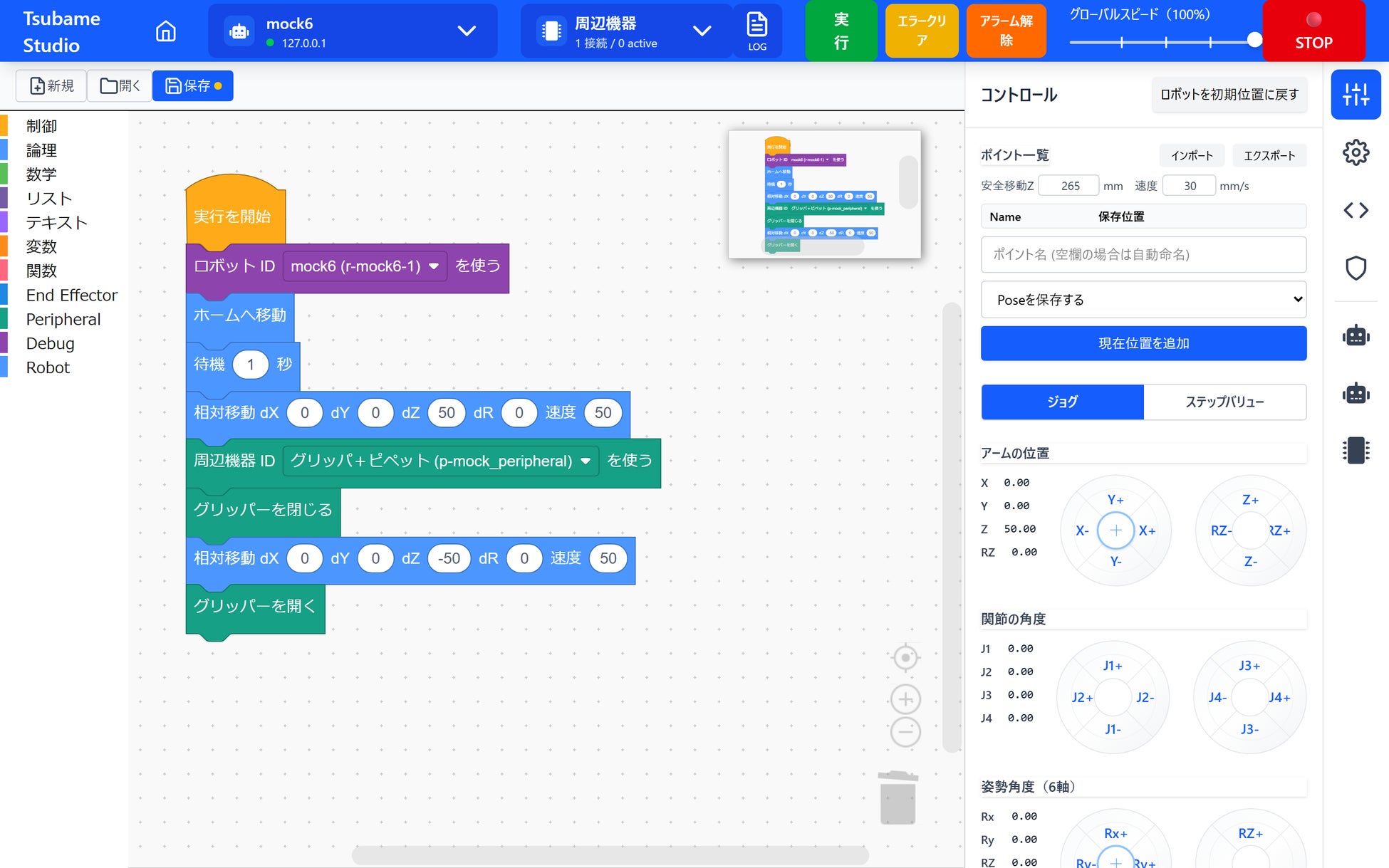
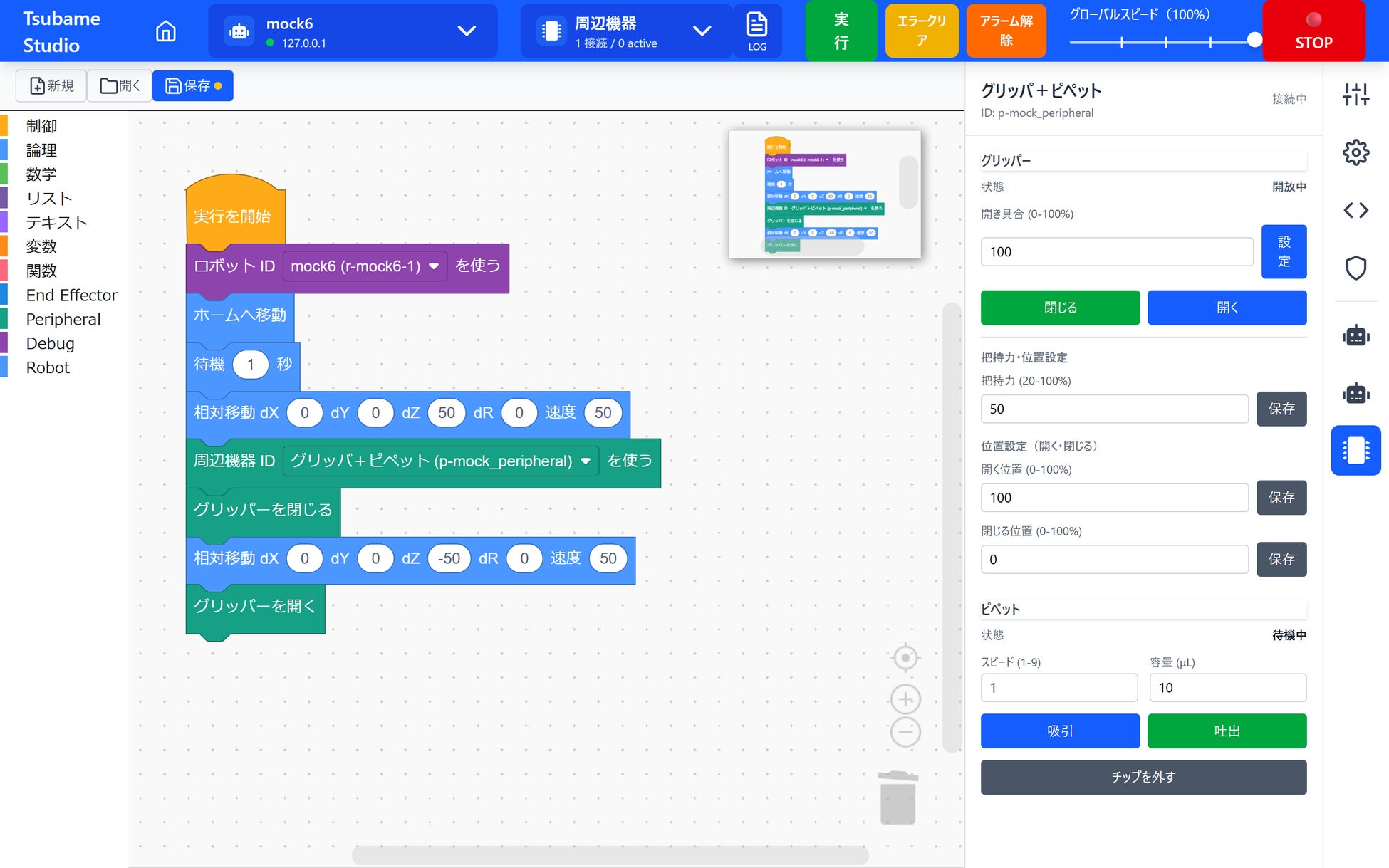
1. ビジュアルプログラミング(ブロックで組む)
ブロックを並べるだけで「ホームへ移動 → 相対移動 → グリッパを閉じる」といった動作シーケンスを組めます(Google Blockly ベース)。ロボット・周辺機器の動作ブロックが用意され、プログラミング未経験でも手順を組み立てられます。
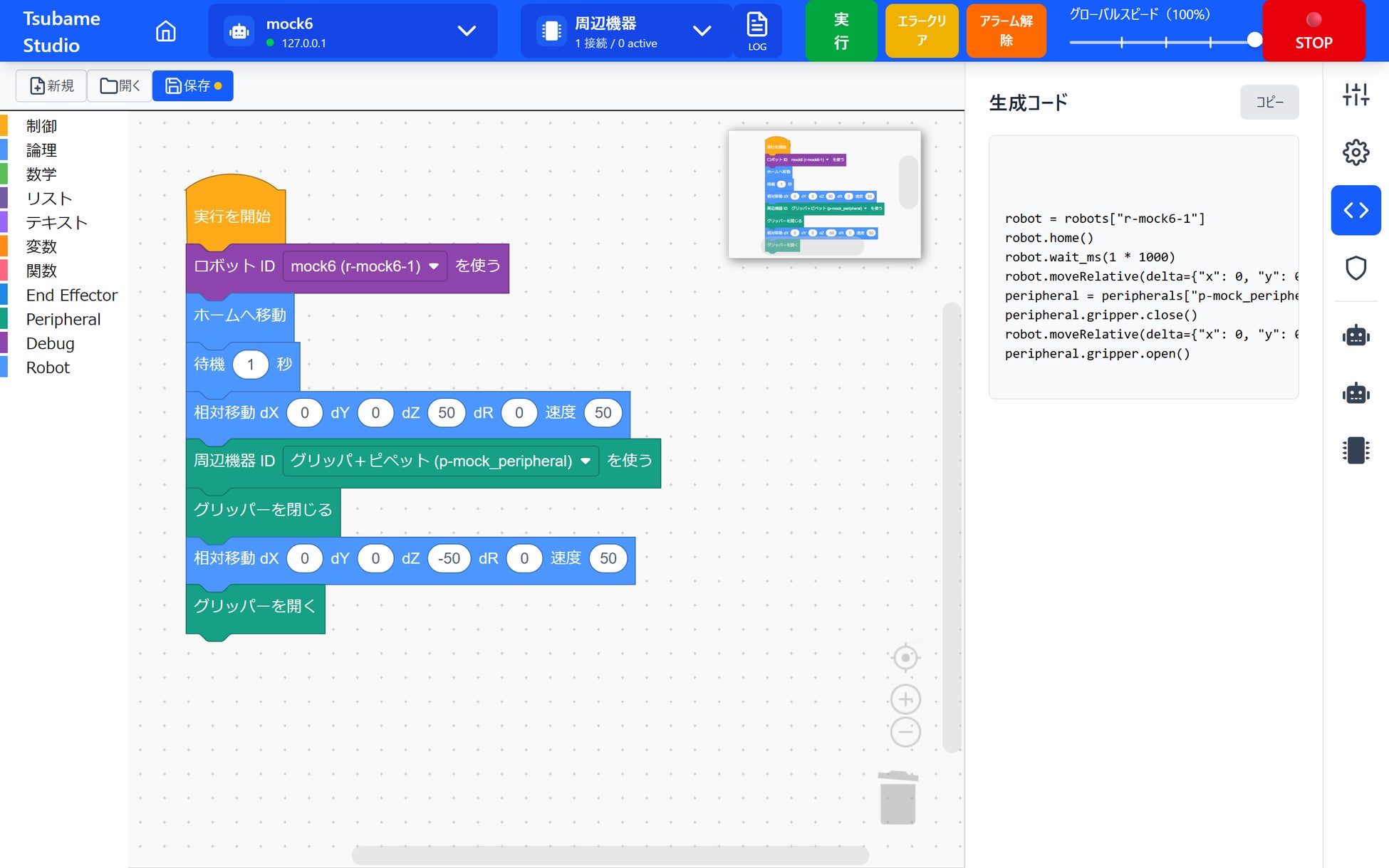
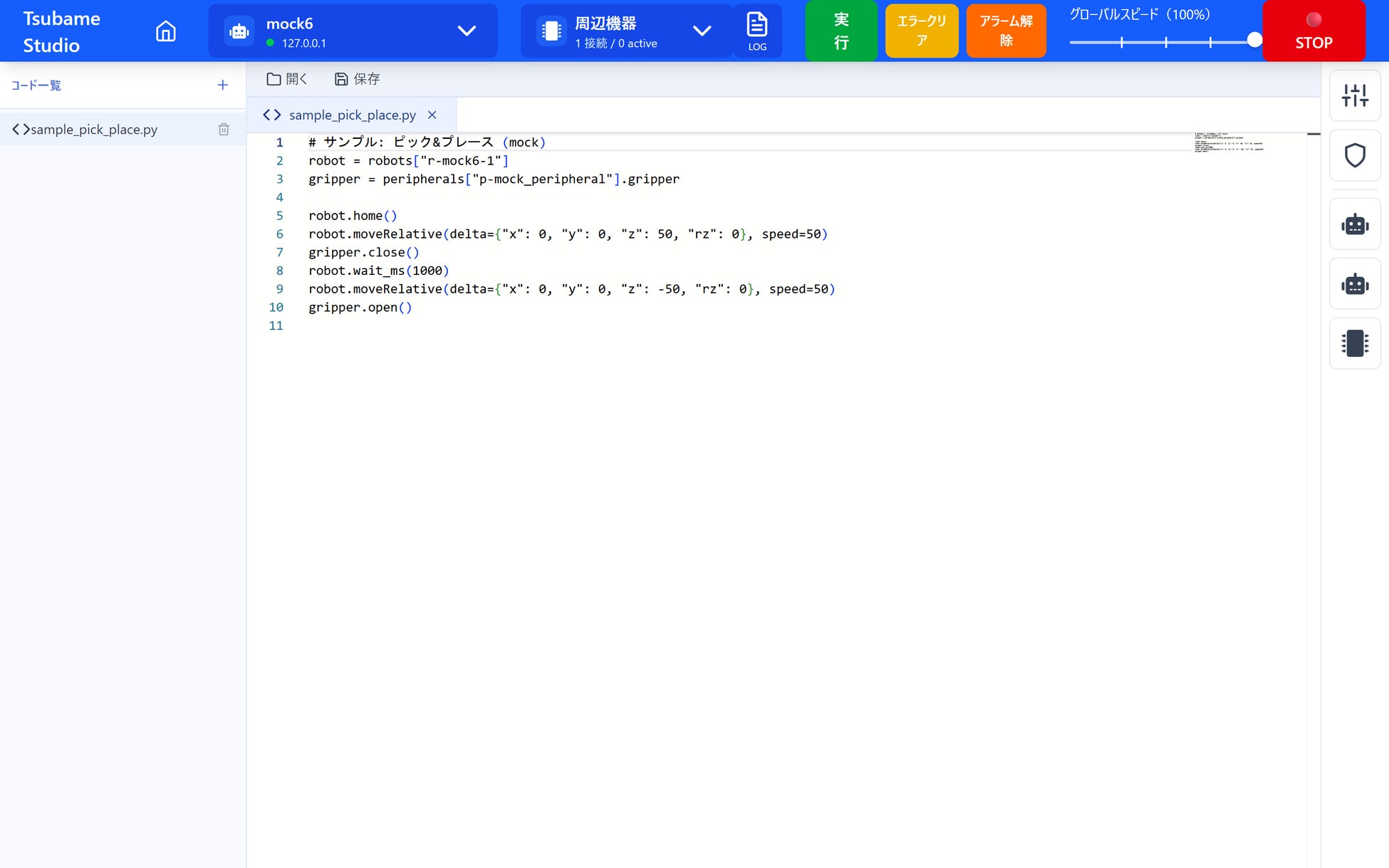
2. ブロックから Python コードを自動生成、スクリプトでも記述可能
組み上げたブロックは、その場で Python コードに自動変換されます。生成されたコードをそのままコピーして再利用したり、Python スクリプトエディタで直接記述・編集して実行したりと、習熟度に応じて段階的にステップアップできます。
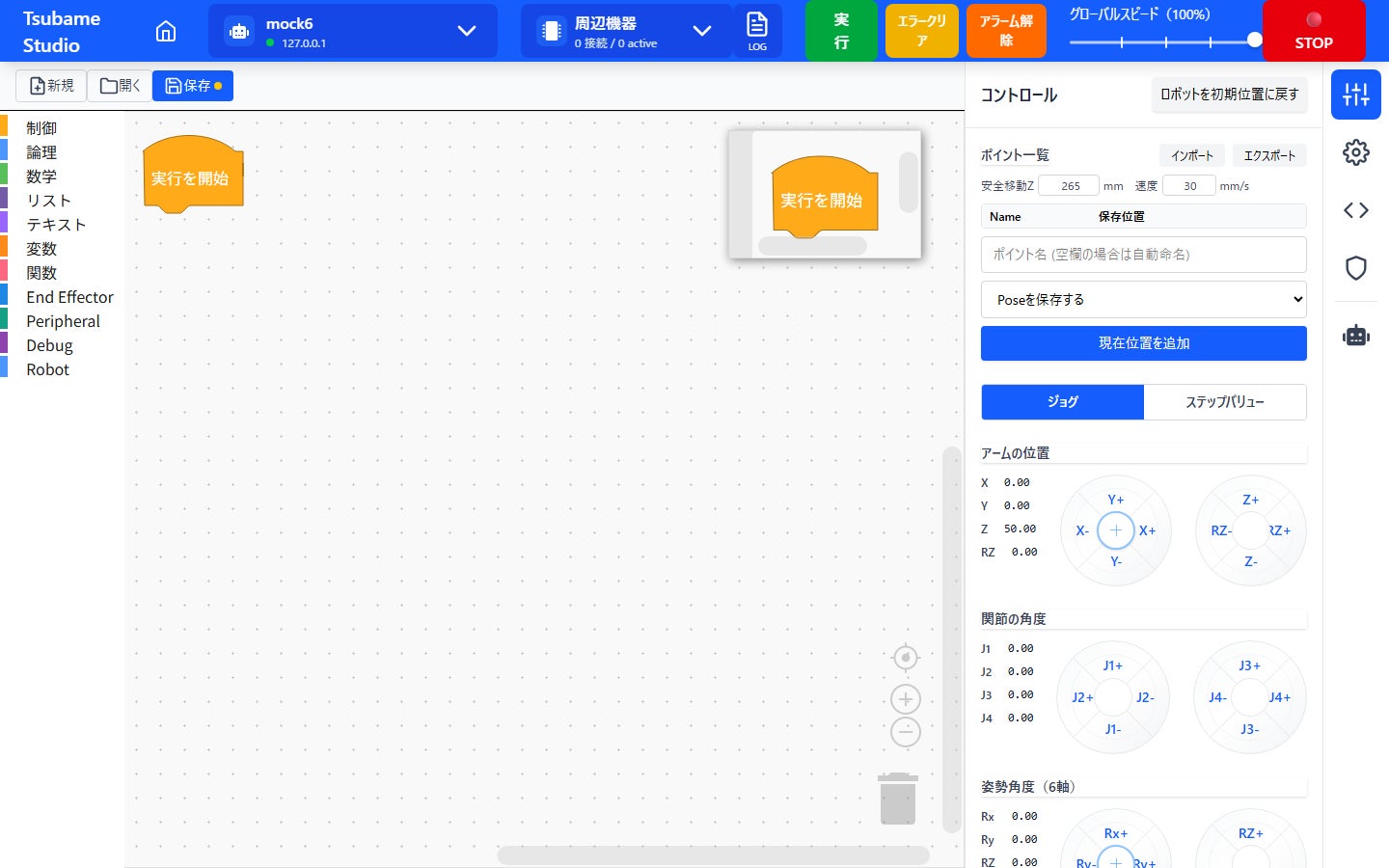
3. 複数機種対応とシミュレーション、GUI ジョグ操作
市販の汎用ロボットアームに対応し、4 軸・6 軸の両アームを扱えます。対応機種は、UR、DENSO、DOBOT、UFACTORY(順次拡大予定)です。アームの位置(X/Y/Z/姿勢)や各関節を、画面上のダイヤルから直感的にジョグ操作できます。実機がなくてもシミュレーション(mock)モードで動作を確認でき、ロボットの登録・接続も GUI から行えます。
4. 周辺機器(エンドエフェクタ)制御
グリッパの開閉・開き具合(%)指定・把持力の調整・把持検知、電動ピペットの吸引/吐出(速度・容量指定)・チップ取り外しなど、エンドエフェクタの細かな制御を GUI から行えます。
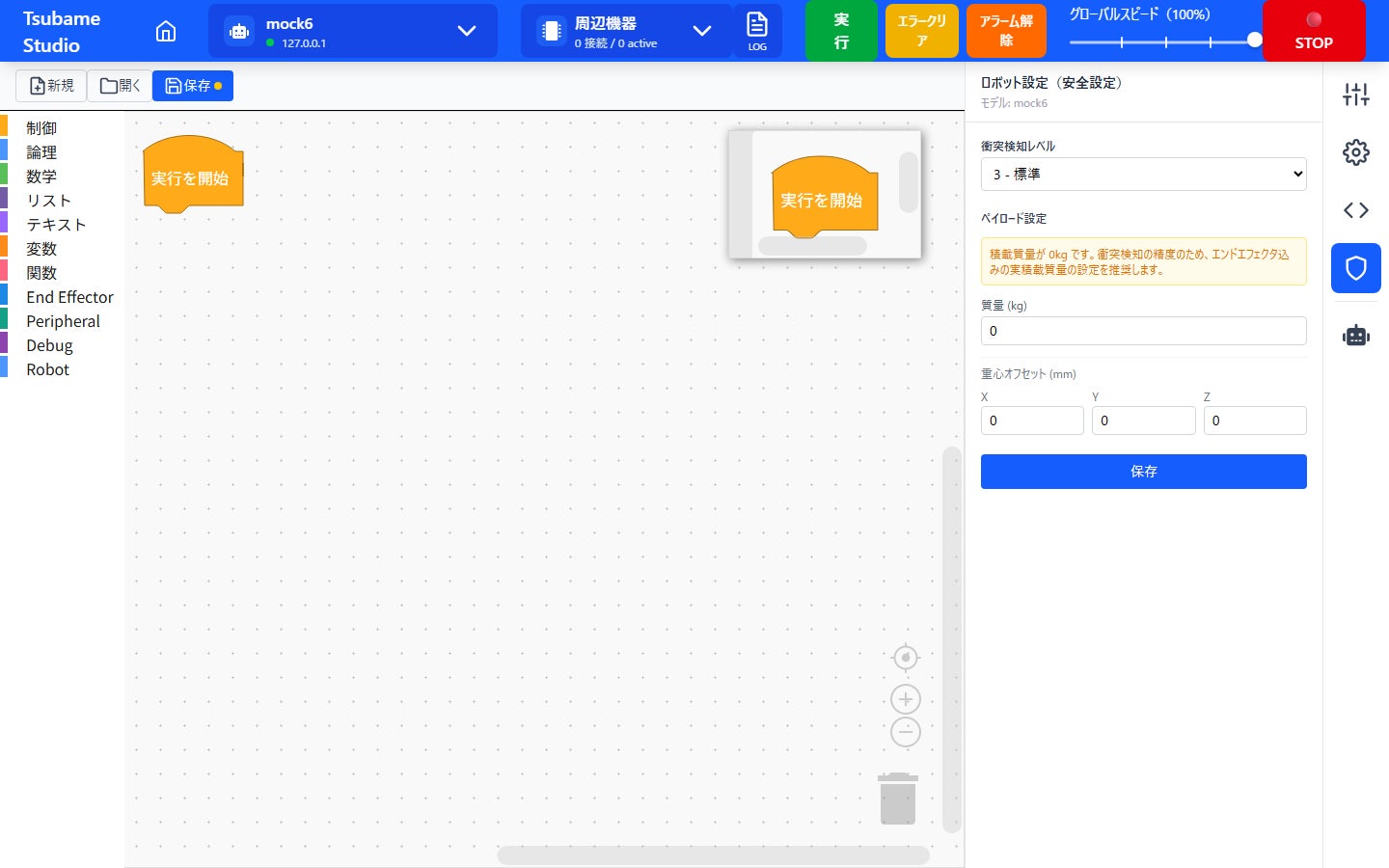
5. 安全機構の標準搭載
緊急停止(E-Stop)・速度制限・可動範囲制限に加え、対応機種では衝突検知レベルやペイロード(質量・重心)設定も GUI から調整可能。教育・研究用途でも安心して使えます。
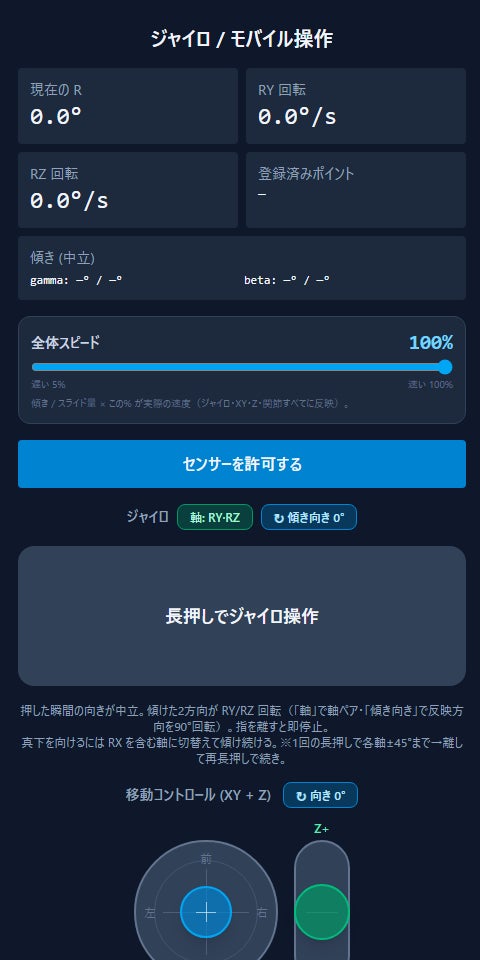
6. スマートフォンからの直感的なジョグ操作
スマートフォンを傾けてロボットを動かすテレオペレーション機能に対応。ティーチング作業を直感的に行えます。
7. 実行ログ・プログラムの版管理
操作・実行の履歴をログとして確認・エクスポートでき、作成したプログラムは名前と変更メモを付けて保存・版管理できます。チームでの再現性ある運用を支えます。
8. 拡張しやすいアーキテクチャ
Port/Adapter 設計を採用しており、新しいロボット機種や周辺機器を追加しやすい構造です。
ライセンスと公開範囲(オープンコア方針)
・ライセンス:オープンソースライセンス GNU AGPL-3.0(ネットワーク経由の提供にもソース公開を求めるコピーレフト型。商用・クローズドな利用には別途ライセンスでの相談に対応)
・公開範囲:ロボット接続・GUI・ビジュアルプログラミング・Python 実行・安全機構・周辺機器制御・実行ログ/プログラム版管理
・今後別途提供予定:AI によるコード自動生成・クラウド連携・実行ジョブ管理・監査ログ高度機能
今後の展望
・デスクトップアプリ版のリリース ─ インストールや初期設定を簡素化し、より手軽に導入できるデスクトップアプリ版を現在開発中で、近日リリースを予定しています〔2026年8月〕(有償提供を予定)。オープンソースのコアに加え、導入支援・クラウド連携などを含む形で提供する計画です。
・対応ロボット機種・周辺機器・測定機器の拡大
・測定機器との連携によるデータ取得・記録・解析の強化
・自然言語の指示から動作プログラムを生成する AI 機能の提供
・クラウドラボ(Experiment-as-a-Service)との連携
Tsubame Lab が進める「クラウドラボ構想」では、実験工程をネットワーク越しに自動化・遠隔実行できる環境の実現を目指しています。Tsubame Studio はその入り口として、現場での操作基盤を担います。
代表コメント
「研究・教育・製造の現場では、ロボットを使いたいというニーズがあるにもかかわらず、専門知識の壁で断念してしまうケースが少なくありません。Tsubame Studio のオープンソース化により、より多くの方がロボットを試し、改善し、活用できる土台をつくりたいと考えています。コミュニティの皆さんとともにエコシステムを育てていきたいと思います。」
─ Tsubame Lab 株式会社 代表取締役 CEO 楢崎 鴻司朗
プロジェクト情報
リポジトリ:`https://github.com/〔organization〕/tsubame-studio`
利用料:無償(オープンソース)
ライセンス:GNU AGPL-3.0
動作環境:Windows〔動作確認済み OS / Python バージョン要記載〕、ブラウザ(Chrome 推奨)
技術スタック:Python + FastAPI / React + TypeScript / Google Blockly
会社概要
会社名:Tsubame Lab 株式会社
本社所在地:〒113-0034 東京都文京区湯島3-4-6 ハイ・シティ湯島 3F
代表者:代表取締役CEO 楢崎 鴻司朗(ナラザキ コウシロウ)
事業内容:ラボオートメーション、クラウドラボ、ロボット制御基盤ソフトウェアの開発、独自エンドエフェクタの開発
公式サイト:https://tsubamelab.com
認定:東京科学大学認定ベンチャー(第15号)
本件に関するお問い合わせ
Tsubame Lab 株式会社
Email:info@tsubamelab.com
すべての画像