アールティが研究用ティーンサイズヒューマノイドロボット「Bonobo」を発売
触れるサービスロボット、二足歩行協働ロボットの研究開発向けに誕生
株式会社アールティ(東京都千代田区、代表取締役 中川友紀子、以下アールティ)は、人型サービスロボットの研究開発促進のため、研究者が触って体感しながら開発できる、本質安全を重視したティーンサイズのヒューマノイドロボット「Bonobo(読み:ボノボ)」を開発しました。
┃開発の背景
アールティには創業時から「サービスロボットとは触れる、触れあえるものであってほしい」という思いがあり、その思いに基づいて、着ぐるみを着て人と握手やハグができるようなエンターテインメントロボット「RIC90(読み:リックキュウジュウ)」や、人の隣でも安全に働ける人型協働ロボット「Foodly(読み:フードリー)」などの開発、販売を続けて参りました。
協働ロボット、サービスロボットの研究開発用教材としては、軽量かつコンパクトでスタイリッシュをコンセプトとしたアームロボット「CRANE-X7(読み:クラインエックスセブン)」や、上半身型ロボット「Sciurus17(読み:シューラスセブンティーン)」を展開し、大学や企業の研究機関などにご活用いただいていましたが、人型(二足歩行)ロボットでも同様のコンセプトの製品が欲しいとのご要望をいただいたことから、この度ティーンサイズのヒューマノイドロボット「Bonobo」としての製品化に至りました。
製品名については、ヒト科チンパンジー属の霊長類ボノボ(Pan paniscus)が遺伝学上もっとも人に近く平和的な動物と言われていることから、人に近い形状で安全を重視したロボットとして同じ名前を採用し「Bonobo」としています。
┃Bonoboの概要
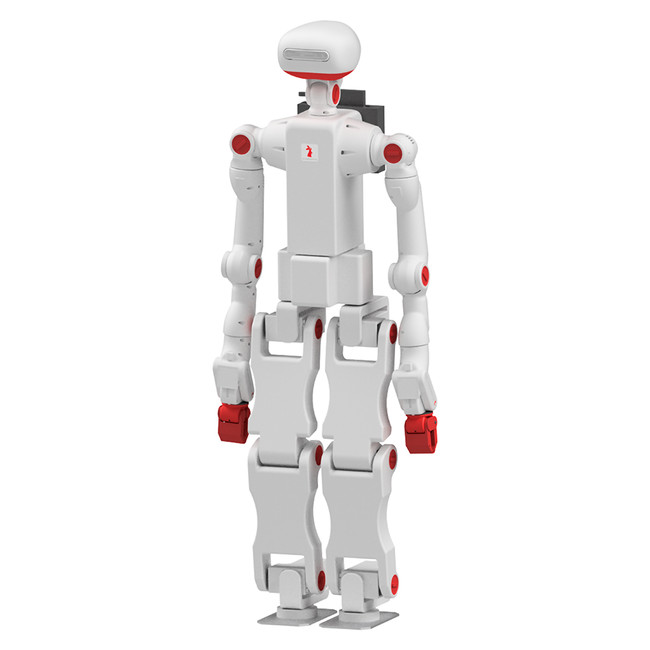
サービスロボットや歩行ロボット、コミュニケーションロボットの研究に使えるヒューマノイドロボットです。身長120cmのコンパクトサイズで、腕の長さは小柄な成人をモデルにしています。
ボディを3Dプリンタ製のプラスチック外装にすることで、全体で約15kgと軽量にしており、研究者が一人でも持って移動させることが出来ます。
全関節80W以下のモータを使用してアーム等の動く力が強くなりすぎないように配慮するほか、挟み込みを防止する設計構造にすることで使用時の本質安全にも優れています。
従来の同コンセプト製品と同じく、持ち運びや稼働中の運用を楽にしたい方、アームやボディを触って体感しながら、触れるサービスロボットや協働ロボットの研究開発を進めたい方に適したヒューマノイドロボットです。
頭部にはデプスカメラを標準搭載しており、対象物の認識や障害物回避の腕の軌道生成などが研究できます。
オプション搭載その他の詳しい仕様については製品ページをご覧ください。
=====
以下、製品等詳細
┃Bonoboについて
研究用ティーンサイズヒューマノイドロボット
価格:13,200,000円(税込)
販売方法:受注生産(納期6か月)
製品ページ:https://rt-net.jp/products/bonobo/

┃CRANE-X7について
サービスロボットの教育・研究向けに開発した7軸構成のアーム型ロボットです。大阪大学 細田 耕教授の研究室と共同開発しています。各軸モータは電流制御が可能となっており、動力学に基づく制御を体感することができるようになっています。
ROSに対応しており、制御用パッケージ、制御サンプルを公開しています。
製品ページURL:https://rt-net.jp/products/crane-x7/
┃Sciurus17について
上半身ヒューマノイドロボット。17軸構成で、頭部に3次元距離カメラを搭載。位置・速度・電流(トルク)制御が選択可能です。
ROSに対応しており、制御用パッケージ、制御サンプルを公開しています。
製品ページURL:https://rt-net.jp/products/sciurus17/
┃アールティについて
「Life with Robot-ロボットのいるくらし-」の実現を目指して、最先端のAI&Roboticsにおける技術開発に挑戦し、AI・サービスロボット分野での高度人材育成から、教育・サービスロボットの自社開発、受託開発まで幅広い事業展開をしています。
「Life with Robot」を実現するマイルストーンとして「Work with Robot」をビジョンにしています。
■HP
https://rt-net.jp/
■Facebook
https://www.facebook.com/RTnetjp
■Twitter
https://twitter.com/rt_corp
アールティには創業時から「サービスロボットとは触れる、触れあえるものであってほしい」という思いがあり、その思いに基づいて、着ぐるみを着て人と握手やハグができるようなエンターテインメントロボット「RIC90(読み:リックキュウジュウ)」や、人の隣でも安全に働ける人型協働ロボット「Foodly(読み:フードリー)」などの開発、販売を続けて参りました。
協働ロボット、サービスロボットの研究開発用教材としては、軽量かつコンパクトでスタイリッシュをコンセプトとしたアームロボット「CRANE-X7(読み:クラインエックスセブン)」や、上半身型ロボット「Sciurus17(読み:シューラスセブンティーン)」を展開し、大学や企業の研究機関などにご活用いただいていましたが、人型(二足歩行)ロボットでも同様のコンセプトの製品が欲しいとのご要望をいただいたことから、この度ティーンサイズのヒューマノイドロボット「Bonobo」としての製品化に至りました。
製品名については、ヒト科チンパンジー属の霊長類ボノボ(Pan paniscus)が遺伝学上もっとも人に近く平和的な動物と言われていることから、人に近い形状で安全を重視したロボットとして同じ名前を採用し「Bonobo」としています。
┃Bonoboの概要
サービスロボットや歩行ロボット、コミュニケーションロボットの研究に使えるヒューマノイドロボットです。身長120cmのコンパクトサイズで、腕の長さは小柄な成人をモデルにしています。
ボディを3Dプリンタ製のプラスチック外装にすることで、全体で約15kgと軽量にしており、研究者が一人でも持って移動させることが出来ます。
全関節80W以下のモータを使用してアーム等の動く力が強くなりすぎないように配慮するほか、挟み込みを防止する設計構造にすることで使用時の本質安全にも優れています。
従来の同コンセプト製品と同じく、持ち運びや稼働中の運用を楽にしたい方、アームやボディを触って体感しながら、触れるサービスロボットや協働ロボットの研究開発を進めたい方に適したヒューマノイドロボットです。
頭部にはデプスカメラを標準搭載しており、対象物の認識や障害物回避の腕の軌道生成などが研究できます。
オプション搭載その他の詳しい仕様については製品ページをご覧ください。
=====
以下、製品等詳細
┃Bonoboについて
研究用ティーンサイズヒューマノイドロボット
 ※画像は開発中のイメージです。設計都合により 一部変更になる可能性がございます。
※画像は開発中のイメージです。設計都合により 一部変更になる可能性がございます。
型番:RT-Bonobo
価格:13,200,000円(税込)
販売方法:受注生産(納期6か月)
製品ページ:https://rt-net.jp/products/bonobo/
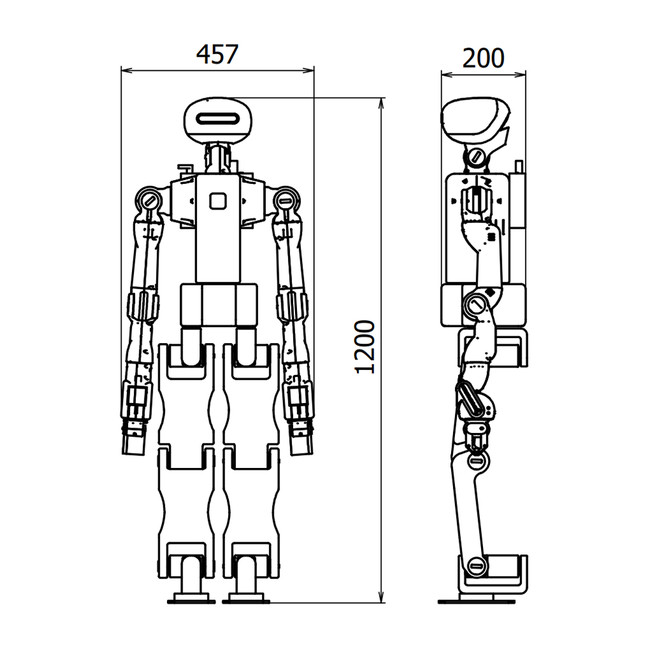
仕様
| 自由度 | 29(ハンド別) |
| 軸数 | 頭:2軸 腰:1軸 腕:7軸 ×2(左右) ハンド:1軸 ×2(左右) 足:6軸 ×2(左右) |
| アクチュエータ |
PH42-020-S300-R ×12 XH430-V350-R ×10 |
| モータ通信 | Raspberry Pi 4 Model B UART-RS485 ×5 (右腕、左腕、右足、左足、頭+胴体) |
| コンピュータ | 画像処理:Jetson Xavier NX ×1 モータ制御:Raspberry Pi 4 Model B 4GB ×1 |
| 無線LANルータ | PA-WX3000HP |
| センサ | F/T:Pressure sensor ×2 IMU:9-axis IMU ×1 Camera:Intel Realsense D415 ×1 【以下オプションで追加可能】 Speaker:USB Connect ×1 Mic:USB Connect ×1 |
| バッテリ | 22V 10000mAh以上 x 1(連続稼働30分以上の容量を目安) |
| サイズ |
457mm x 200mm x 1200mm(幅、奥行、高さ) |
| 重量 |
約15kg(バッテリーを含む) |
 ※画像は開発中のイメージです。設計都合により 一部変更になる可能性がございます。
※画像は開発中のイメージです。設計都合により 一部変更になる可能性がございます。
┃CRANE-X7について

サービスロボットの教育・研究向けに開発した7軸構成のアーム型ロボットです。大阪大学 細田 耕教授の研究室と共同開発しています。各軸モータは電流制御が可能となっており、動力学に基づく制御を体感することができるようになっています。
ROSに対応しており、制御用パッケージ、制御サンプルを公開しています。
製品ページURL:https://rt-net.jp/products/crane-x7/
┃Sciurus17について

上半身ヒューマノイドロボット。17軸構成で、頭部に3次元距離カメラを搭載。位置・速度・電流(トルク)制御が選択可能です。
ROSに対応しており、制御用パッケージ、制御サンプルを公開しています。
製品ページURL:https://rt-net.jp/products/sciurus17/
┃アールティについて
「Life with Robot-ロボットのいるくらし-」の実現を目指して、最先端のAI&Roboticsにおける技術開発に挑戦し、AI・サービスロボット分野での高度人材育成から、教育・サービスロボットの自社開発、受託開発まで幅広い事業展開をしています。
「Life with Robot」を実現するマイルストーンとして「Work with Robot」をビジョンにしています。
■HP
https://rt-net.jp/
https://www.facebook.com/RTnetjp
https://twitter.com/rt_corp
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- 電子部品・半導体・電気機器
- ダウンロード