【東大発AIベンチャー】障害物回避型ロボットアームの事業で「ものづくり・商業・サービス生産性向上促進補助金」に採択決定
- 当補助金に採択された背景
 特定ものづくり基盤技術「8.機械制御技術」
特定ものづくり基盤技術「8.機械制御技術」
今回採択が決定したものづくり補助金の採択金額は1,000万円。資金は、AI・物理学の理論を用いて独自開発した障害物回避型ロボットアームの自動経路設計アルゴリズムおよび、そのアルゴリズムを標準搭載した3Dプリンター製のロボットアーム機体の設計・開発・製造に活用する。
- 当補助金で開発予定の製品の概要
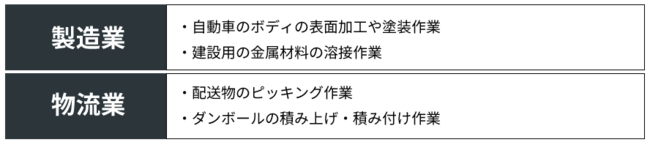
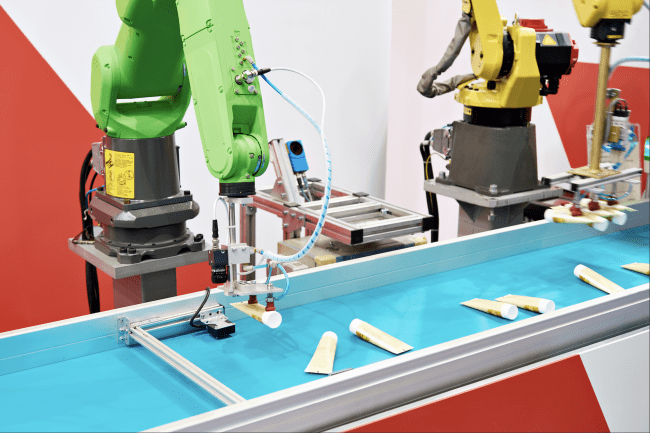 障害物回避ロボットアームの作業の事例
障害物回避ロボットアームの作業の事例
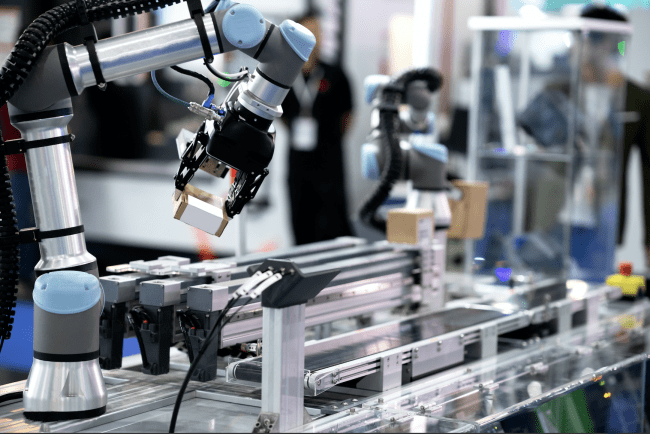
製造業や物流業において労働人口の減少に伴う人材不足の深刻化や、人身に関わる災害リスクなどの懸念から、ロボットによる導入のニーズが高まっている。
そこでTRUST SMITH株式会社は、本補助金により「障害物回避型ロボットアームの設計・開発・製造」を行う。
ロボットアームを製造しユーザーに導入することができれば、工場や倉庫におけるあらゆる業務を遂行することが可能となり、製造業・物流業の抱える労働力不足解消と生産性の向上、ヒューマンエラーや労災リスクの低減を実現できる。
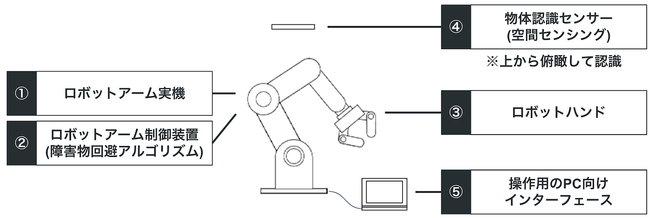
ロボットアームの構成例
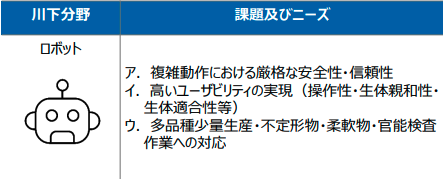
技術の特徴
①【安全性・信頼性】障害物を自動で回避して、安全に業務を遂行可能
②【ユーザビリティ】ティーチング不要で簡単に操作可能
③【多品種少量生産・柔軟物への対応】様々な物体に対して汎化的にタスクを実行可能
主な用途
ユーザーのメリット
①人手不足の解消と人件費の削減
②作業ミス・災害の防止
社会全体のメリット
①コロナウイルスへの対策の促進
②研究者・開発者をはじめとする雇用の創出
- 今後の展望

TRUST SMITHは、社内の組織体制として「ラボ制」を採用し、東京大学や京都大学をはじめとする学術機関に在籍あるいは卒業した研究員を中心に、当社独自のアルゴリズムの研究開発に取り組んでいる。
「障害物回避型ロボットアームの設計・開発・製造」を始め、今後も様々なAI・ロボティクスにより、社会の諸問題の解決を目指す。
・【東大発AIベンチャー】障害物回避型アームのアルゴリズムで特許取得
https://prtimes.jp/main/html/rd/p/000000024.000049040.html
・【東大発AIベンチャー】ロボットアームの異常停止後の原点回帰の経路を自動算出するアルゴリズムを開発
https://prtimes.jp/main/html/rd/p/000000035.000049040.html
■TRUST SMITH (トラストスミス )株式会社 会社概要

所在地:東京都文京区本郷4丁目1-1 菊花ビル7F
代表:大澤 琢真(渡辺 琢真)
事業内容:数理・物理アルゴリズム(AI)の開発
設立日:2019年1月18日
会社HP:https://www.trustsmith.net/
連絡先メールアドレス:office@trustsmith.net
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
