はやぶさ2ミッションへのQoncept vSLAMの貢献
Qoncept vSLAMを用いた小惑星リュウグウの3次元形状復元
株式会社Qoncept, 株式会社モルフォによる宇宙探査イノベーションハブ事業「テクスチャレスシーンのためのロバストなVisual SLAMの研究」の成果によるvSLAM技術が,はやぶさ2ミッションのタッチダウン運用などに貢献することが、はやぶさ2記者説明会(18/08/02)で報告されました。
株式会社Qonceptでは、はやぶさ2から受信した複数枚の静止画像から、リュウグウの3次元形状復元処理を行い、精密な3Dモデルデータを作成します。今後この3Dモデルデータを使った閲覧アプリやVR体験アプリによって、リュウグウの形状や大きさ、はやぶさ2の動きなどをわかりやすく可視化する予定です。
40kmから撮影した連続画像よりvSLAM処理を実施した処理例を示します。
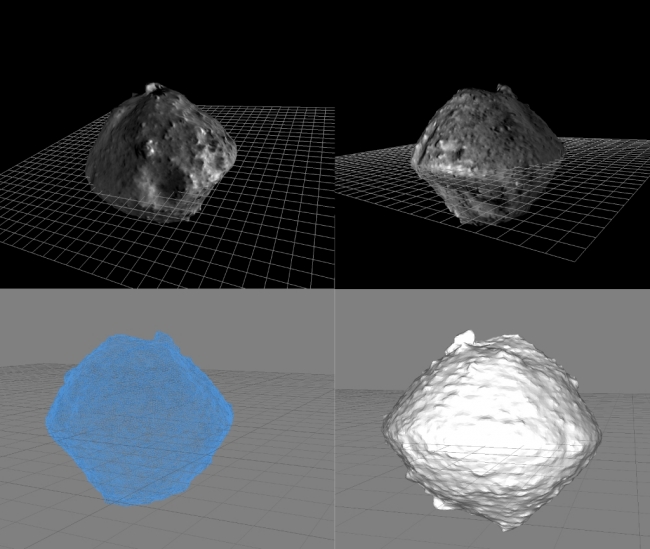 リュウグウの3次元形状復元
リュウグウの3次元形状復元
宇宙探査イノベーション事業について
テーマ:テクスチャレスシーンのためのロバストなVisual SLAMの研究
研究内容:Visual SLAMの動作環境をより広げるため、従来の特徴点ベースSLAMに加えて、エッジ情報や、わずかな陰影を特徴量として利用するなど、シーンごとに適する特徴を切り替えることの可能な統合型のVisual SLAMの開発
http://www.ihub-tansa.jaxa.jp/topics_vslam.html
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- システム・Webサイト・アプリ開発パソコンソフトウェア
- ダウンロード
