日替り弁当・惣菜(不定形・多品種)盛付ロボットを組み込んだ完全自動化ラインをFOOMA JAPAN 2023(国際食品工業展)に出展
【大学発触覚センシング技術を開発するFingerVision】


◆弁当・惣菜業界の「課題」と「自動化を阻む6重苦」
多品種×中/少量生産である弁当や総菜の盛付は、自動化が容易ではなく、人手に依存した生産が続いています。極めて労働集約的であることが過去何10年も課題視されてきた中で、なぜ変革が難しいのでしょうか。その背景には、自動化を阻む6重苦(①不定形・個体差あり、②多品種・日替り、③タクトが早い、④人件費単価が低い、⑤専用機だと稼働率低、⑥生産時間が短い)の存在があります(①~③は技術面で、④~⑥は経済面で自動化を阻む要因)。さらには、各阻害要因が相互依存の関係にあり、一見、突破不可能な難題に見えます。こういった6重苦が存在するリアリティを踏まえ、次世代型の生産(盛付)ラインでは、何を目指し、どういった解決のアプローチが必要になるのでしょうか。
◆経営課題に即した「FingerVisionの解決アプローチ」
ロボットを活用した生産ラインという目線でいうと、中長期的に目指すべき姿は、(人手を極力介在させない) 完全自動化ラインであり、その際のKPIは、「設備稼働率の最大化」である、とFingerVisionは考えています。
当然、費用対効果を踏まえて、人とロボットを1つの生産ラインの中に共存させるアプローチは、特定の現場や自動化設備を導入する過渡期においては現実的な落とし所になりえます。一方で、部分的に自動化された生産ラインでは、オペレーションの設計を1歩間違えると、却って労働生産性やスループットが悪化し、省人化による効果を享受できなくなる点に注意が必要です。理由は、シンプルで、「人手は時給換算であり、短い時間でパっとタスクをこなすことが経済的」という特性と、「ロボットは設備であり、できるだけ長時間(24時間365日)稼働し続けることが経済的」という異なる経済原理を持つものが、同一(速度・稼働時間)の生産ラインに組み込まれていることに起因します。この場合、目標とすべきKPIが人手とロボットとの間で整合がとれず、中途半端に定義されてしまうため、投資による期待効果が得られません。
そこで、あくまで一気通貫(End-to-end)で自動化された生産ラインの構築を中長期的なゴールに設定し、「生産のやり方」や、さらには「販売のやり方(商品構成、オーダーの平準化等)」を含めて経営目線で「変革」させていくアプローチが根本的には必要になります。今後、今まで以上に「人手の確保が困難になる」ことは誰の目から見ても明らかであり、「人的資源」が経営上のアキレス腱になります。こういった現状を踏まえ、人手に過度に依存しない「安定的な供給能力」を確保することが、1丁目1番地の経営課題である、と危機意識をお持ちである食品業界の皆様方とFingerVisionは次世代型の生産ライン構築に邁進して参ります(逆に、この先、安定的な供給能力を手に入れることこそが経営の安定性や競合優位性に直結するとも言えます)。
ここで、完全自動化ラインを構成する要素に目を向けると、技術的に非常に難易度が高いのは「日替りおかずの盛付」工程になります。単一で画一的な「おかず」だけを盛付ける生産ラインは現実的には存在せず、不定形で個体差があり、かつ、種類も多岐に渡る・変更される「おかず」を扱えることが実運用上求められます。
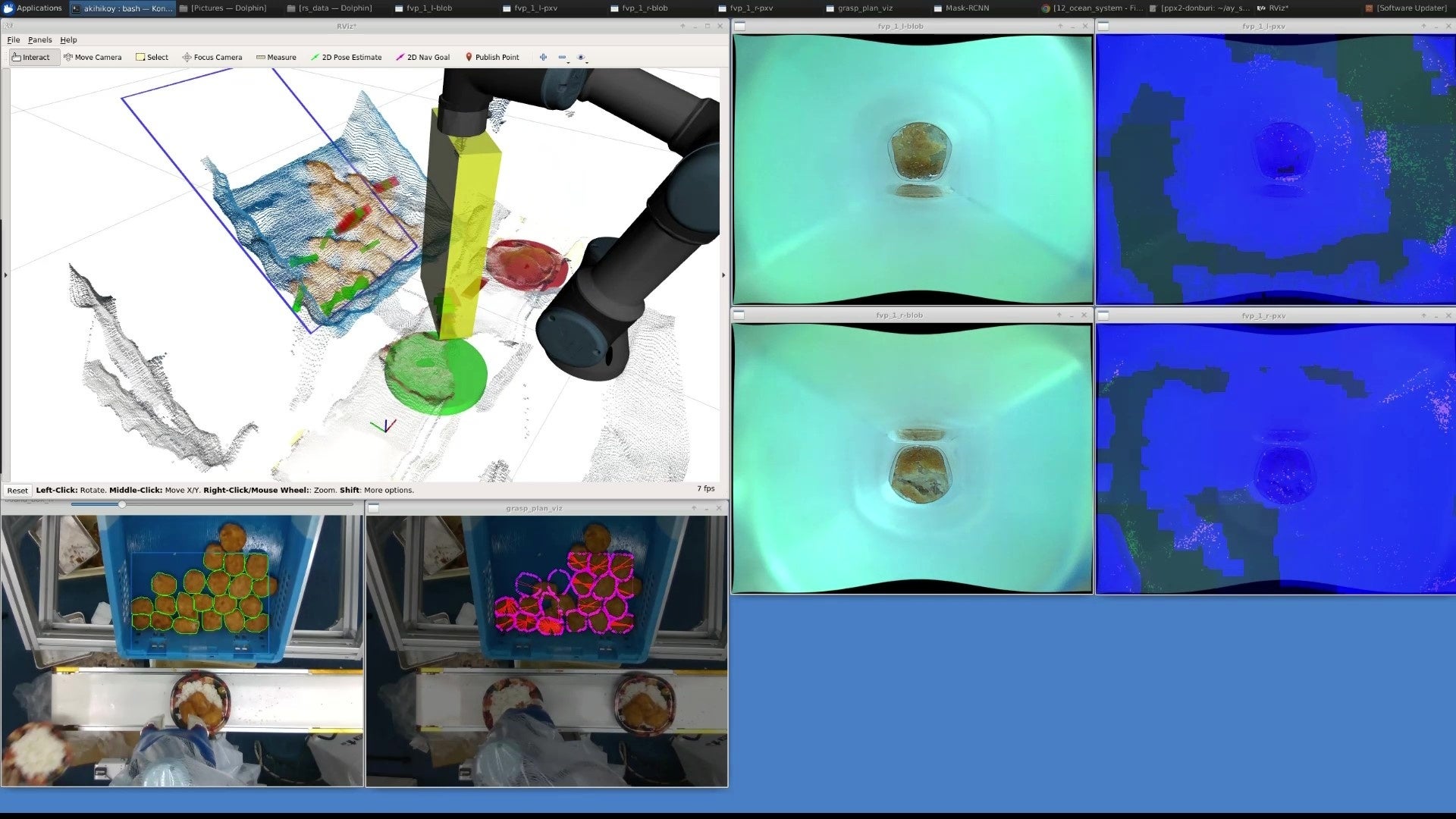
一方で、従来の機械(専用機)やロボットによるアプローチでは、多品種食材に対して「正確性(失敗せず、壊さずに掴める)」と「汎用的(何でも掴める)」とを同時に実現することは容易ではありません。その点、FingerVisionは、「食材を傷つけない最小の力で触れながらも、持ち上げた瞬間の滑りを検知して落とさずに掴む」ことを「ロボットハンドの高機能化」や「視覚と触覚の組み合わせ」により実現しており、具体的には、月曜は唐揚げ、火曜はハンバーグ、水曜は天ぷらといった多品種食材の盛付対応が可能です。
高頻度の段取り替えや、新製品へのリニューアル含む多品種食材に対応したロボットシステムは、「高稼働率」を維持できるため、食品業界においても投資対効果が十分得られる解決策になります。
◆FOOMA2023でのFingerVision展示内容詳細
①株式会社山善ブース (5G-42)
FingerVisionの弁当・惣菜(不定形・多品種)盛付ロボットを含む「完全自動化ライン」を展示
https://www.foomajapan.jp/exhibitor_info/search/exhibitor-details/index.php?c=2106057
②スタートアップゾーンFingerVisionブース(7S-24)
触覚技術の詳細やその他食品アプリケーション(洋菓子等)をご説明する簡易的な展示
https://www.foomajapan.jp/startup/
③スタートアップ・ピッチプレゼンでの登壇(06.07(水) 13:00~13:20)
代表取締役 濃野友紀が登壇 “待望!日替り弁当・惣菜の盛付ロボットが実稼働へ”
◆会社概要
・社名: 株式会社FingerVision
・代表取締役: 濃野友紀
・開発拠点:
・東京都文京区本郷3丁目39-17 KOGAビル3階
・京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・資本金等: 104百万円 (資本準備金含む)
・設立: 2021年10月
・URL: https://www.fingervision.jp/
・YouTube: https://www.youtube.com/channel/UCRgZuTJvDxjD_7ta03BRQFA
・LinkedIn: https://www.linkedin.com/company/fingervision/
・Twitter: https://twitter.com/Yuki_Nono_fv
当社のロボットシステム・技術にご興味がございましたら、お気軽にお問合せ下さい。
・メール:contact@fingervision.jp
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できます。高機能(高分解能・マルチモダリティ)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- 電子部品・半導体・電気機器経営・コンサルティング
- ダウンロード