“高付加価値・触感デジタルデザイン生成アルゴリズム公開”のご案内
広島大学大学院工学研究科・栗田雄一研究室と株式会社アプリクラフト(代表取締役:女井誠司)は、2020年3月、3DモデリングツールのRhinocerosおよびそのプラグインソフトであるGrasshopperによって“高付加価値・触感デジタルデザイン”を生成するアルゴリズムを共同開発し、Webページで一般公開しました。
>>> 公開ページ https://www.applicraft.com/syokkan_sample/
〇 概要
“Grasshopper”と”触感モデル”
“Grasshopper”は、Robert McNeel & Associates 社(本社 米国・シアトル)が開発する3次元曲面モデラー“Rhinoceros”に含まれる機能の一部です。また“Grasshopper”は、GAE(Graphical Algorithm Editor)とも呼ばれ、視覚的にデジタルモデルを生成するアルゴリズムを作成することができ、コンピュテーショナル・デザインやジェネレーティブ・デザインなどと呼ばれるコンピュータを利用したデザイン手法を実現するツールとして国内外で広く認知されています。
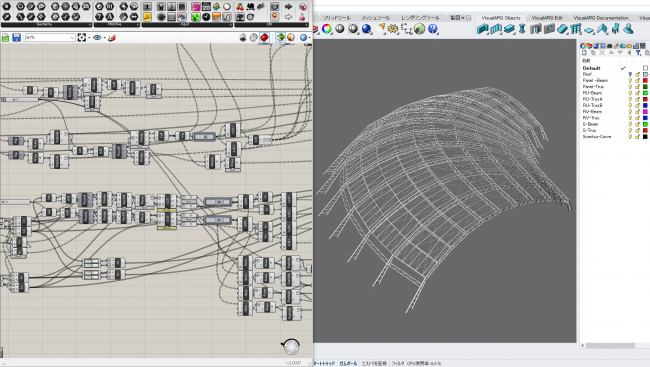 Graphical Algorithm Editor の”Grasshopper”
Graphical Algorithm Editor の”Grasshopper”
工業製品のデザインにおいて、視覚に訴える「かたち」と共に、「持ちやすさ」「触り心地」という言葉に代表される触感は、製品の質感や付加価値を左右する、重要な五感要素の一つです。しかし現状は、人間の主観的な感覚である触感と素材や形状の定量的なパラメータとの相関はいまだ十分には解明されていません。
触感を評価するには、摩擦係数や表面の粗密などのパラメータを定量的に計測するか、または人が触って官能評価するしかありませんが、いずれにしても実際にサンプルを制作する必要があります。ただ、デジタルツールを使用して、形状・大きさ・表面の凹凸度合いなどを変化させて3次元モデルを作成するには、豊富な知識と経験を要します。さらに無数のサンプル形状をシミュレーションし、制作、検証するには膨大な時間と労力を必要とするため、Grasshopperを代表とするコンピュテーショナル・デザイン手法を用いたパラメトリックな数値制御を可能とするツールが不可欠になります。
今回公開したデータは、広島大学大学院工学研究科・栗田雄一研究室の依頼により作成した触感評価用サンプルの生成を支援するアルゴリズムを搭載した10種類のGrasshopper定義ファイルです。各定義ファイルは生物的・有機的デザインを意識しており、パラメータを変更することにより、理論的上、無限に近い触感サンプルの生成が可能となっています。また、生成される3Dモデル表面の触感を想像しやすくするために、表面高さや傾斜角度を可視化する機能を有しています。
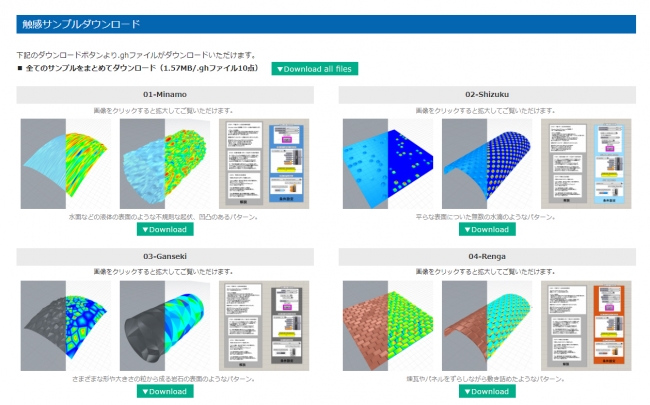 10種類のGrasshopper定義ファイルを一般公開
10種類のGrasshopper定義ファイルを一般公開
Grasshopperにより生成、Rhinocerosにより出力される3Dデータ(3dm形式)は、汎用性に優れるだけでなく、代表的な中間フォーマット“IGES”や“STEP”等互換性の高いデータ出力、さらには”STL”や”3DS”等ポリゴン形式で出力することにより3Dプリンタでの造形も容易とします。
“CMF”と“触感モデル”
3次元CADなどデジタルデザインにおける、製品表面のデザイン(サーフェスデザイン)の領域では、CMFという概念が一般化されています。ここで言うCMFとは、工業製品等の“モノの表面(サーフェス)”のデザイン要素で、
「Color(色)、Material(素材)、Finishing(加工)」
の3つの要素で構成されています。CMFはサーフェスの美しさ、品質向上、表面保護、コンセプト表現などには不可欠な要素であり、CMFによるサーフェスデザインは、感性による価値創造につながります。
触感モデルはCMFに加え、“拡張CMF”として定義する事ができます。
「Feeling(感覚)、Function(機能)、Form(形状)」
の要素に加え、触感によって生成される機能的価値を持つサーフェスを、数学的表現(アルゴリズム)により実現し、感性テクノロジーの概念を補強した“拡張CMF”として、さらに高い価値創造につながるデザインを可能とします。
〇 今後の展望
持ちやすさや触った時の心地良さは、製品の主観的な質感を決める大事な要素の一つです。前述の通り、現状、触感には確立された評価指標が存在しないため、感覚を正確に他者とシェアすることができず、良い触感/悪い触感に関する知見やノウハウが承継されていません。触感の可視化・定量化技術をベースに開発された触感モデルにより、さまざまな触感を持つ試作サンプルを手軽に制作できます。これにより、良い触感が正しく評価され、安全で使いやすい製品を手に入れやすくなることに貢献します。
操作方法のチュートリアル動画も公開中!

■広島大学大学院工学研究科・栗田雄一研究室
主宰者である栗田雄一は、博士(工学)学位取得後、ニューヨーク州立大学客員准教授、ジョージア工科大学客員研究員、奈良先端科学技術大学院大学助教等を経て、2011年より広島大学大学院工学研究科准教授、2018年より同教授を務めている。JSTさきがけ研究員、東京大学客員研究員、一般社団法人超人スポーツ協会理事、広島県感性イノベーション推進協議会委員などを兼任。ハプティクス、人間機械システム、人間拡張などの研究を推進している。
http://www.bsys.hiroshima-u.ac.jp/~kurita/

■株式会社アプリクラフト
株式会社アプリクラフトは、ベジエやNURBS等数学表現で2D/3Dを表現するグラフィックス・モデリングと視覚化技術に於けるアプリケーションソフトウェアを販売・サポート・コンサルテーションを行う会社で1997年8月に設立。主な取扱い製品は、自社開発及びHotdoor社製品のアドビイラストレーターの各種プラグインに加え3次元NURBSモデラーの“Rhinoceros”、DATAKIT社のトランスレーターなどがある。
URL:https://www.applicraft.com/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- パソコンソフトウェア
- ダウンロード
