ダブル技研、人の手サイズの多指ロボットハンドを実現する 超小型Motor-in-Fingerアクチュエータ「D-Drive Module(DDM)」を発表
ダブル技研株式会社(神奈川県座間市、代表取締役:和田始竜)は、ヒューマノイドロボットや
多指ロボットハンド向けの超小型アクチュエータモジュール D-Drive Module(DDM) を販売開始!
近年、ヒューマノイドロボットやAIロボットの開発が世界的に加速しています。
一方で、人の手に近い多自由度動作を実現するためには、
指内部へ実装可能な小型・軽量・高機能なアクチュエータが 必要不可欠となっています。
DDM(D-Drive Module)は、その課題に対応するために開発された、
ロボット指向けの超小型オールインワン型モーションモジュールです。
本モジュールは、
・超小型スロットレスBLDCモータ ・高精度遊星ギア減速機構 ・クローズドループ制御ドライバ
・位置/速度/温度/電流フィードバック機能 をコンパクトに一体化しており、
Motor-in-Finger構造への組み込みを前提として設計されています。
また、ダブル技研が現在開発を進めている多指ロボットハンド「D-Hand 5MT」に実装されており、 人の手サイズで約400gという小型軽量なロボットハンドの実現に貢献しています。
主な特徴
・指内部へ実装可能な超軽量設計(約10g)
・28:1減速機構内蔵
・168ステップ クローズドループ制御
・低バックラッシュ構造
・UART通信対応
・位置/速度/温度/電流フィードバック対応

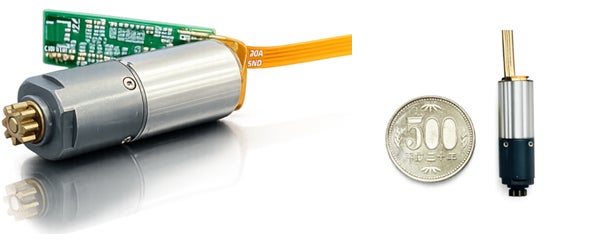
主な仕様
型番:DDM-1017-R28-U / DDM-1117-R28-U
外形寸法:φ10×17mm
φ11×17mm
モータ:スロットレスBLDC
重量:約15g
減速比:28:1
最大電流:1.5A
通信:UART
(RS485 / CAN / I2C / SPI は今後対応予定)
今後の展開
・ヒューマノイドロボット
・義手
・ウェアラブル外骨格
・研究開発用途
への展開を進めるとともに、
・Quasi Direct Drive(準ダイレクトドライブ)
・さらなる低バックラッシュ減速機構
などの技術開発を進め、次世代ロボットハンド向け
アクチュエータとして発展させてまいります。

当社では、従来より劣駆動機構を活用したD-Handシリーズの開発を行っておりますが、
昨年よりハンド内(指や手のひら)にモータ・減速機・ドライバ等を内蔵したオールインワンタイプの「D-Hand 5MT」の開発を進めております。
D-Hand 5MT の開発コンセプトは、「人の手に近い多自由度動作を実現しながら、モータ・減速機構・制御コントローラをハンド内部に集約した小型軽量なオールインワン型ロボットハンドを実現すること」にあります。
特に、各指内部にモータおよび減速機構を内蔵した Motor-in-Finger 構造により、
人の手サイズで約400gという小型軽量ロボットハンドと、
多指独立制御による高い操作性の両立を目指しています。
このたび、この超小型モータモジュール「DDM」を外販することといたしました!

すべての画像