『ドローン画像解析による車両通行可否判断システム』の実証実験を実施。災害時に車両通行の可否を判断するシステムの有効性と実用の可能性を検証。
アヴァント株式会社(本社:東京都中野区、代表取締役:鈴木将親)は、関東経済産業局、関東地方整備局、中小企業基盤整備機構関東本部が連携する「コンストラクションオープンイノベーションマッチング」において、当社が提案した『ドローン画像解析による車両通行可否判断システム』の実証実験を実施し、ドローンを使ったシステムの有効性と実用の可能性を検証したことをお知らせいたします。
【国土交通省 関東地方整備局 現場ニーズと技術シーズのマッチング】
【経済産業省 関東経済産業局 オープンイノベーション・マッチングスクエア(OIMS)】
https://www.ktr.mlit.go.jp/ktr_content/content/000786383.pdf
【国土交通省 関東地方整備局 現場ニーズと技術シーズのマッチング】
【経済産業省 関東経済産業局 オープンイノベーション・マッチングスクエア(OIMS)】
https://www.ktr.mlit.go.jp/ktr_content/content/000786383.pdf
■ドローンを使った防災・災害時の車両通行の可否判断
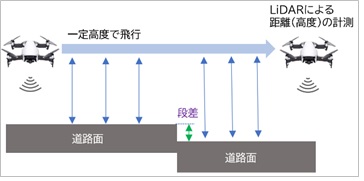
『ドローン画像解析による車両通行可否判断システム』は、ドローンに搭載したLiDAR (レーザーレーダー)により橋梁段差や道路冠水の水位測定を行い、AI画像解析により、災害時に車両通行の可否を判断するシステムです。
今回の実証実験の目的は、開発したシステムの有効性と実用の可能性を探ることです。実用までには多くの課題も浮き彫りとなりましたが、今後、ドローンの利用法や測定の安定性、画像解析の精度を追求することで、災害時でも安全に車両通行の可否を判断するシステムの活躍の場が広がる可能性を確認することができたと言えます。
アヴァント株式会社
https://www.avant-sl.com/
『ドローン画像解析による車両通行可否判断システム』は、ドローンに搭載したLiDAR (レーザーレーダー)により橋梁段差や道路冠水の水位測定を行い、AI画像解析により、災害時に車両通行の可否を判断するシステムです。
今回の実証実験の目的は、開発したシステムの有効性と実用の可能性を探ることです。実用までには多くの課題も浮き彫りとなりましたが、今後、ドローンの利用法や測定の安定性、画像解析の精度を追求することで、災害時でも安全に車両通行の可否を判断するシステムの活躍の場が広がる可能性を確認することができたと言えます。
 レーザーレーダーを搭載したドローンの飛行実験
レーザーレーダーを搭載したドローンの飛行実験

アヴァント株式会社
https://www.avant-sl.com/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
