3Dスキャナー搭載自動走行ロボットによる公園内の巡回警備を実証実験として『あいちロボットトランスフォーメーション』にて実施
~リアルタイムに放置自転車を通知し、警備員のサポートが可能に~
『あいちロボットトランスフォーメーション※1』とは
愛知県がサービスロボット社会実装推進事業として開催している『あいちロボットトランスフォーメーション(以下:ARX)』は、商業施設や病院などの課題解決のためにロボット導入を目指すユーザーと、ロボット導入に知見のある専門家をマッチングすることで、新たなサービスモデルの創出に取り組んでいます。
その中でロボット導入を目指すユーザーの1社として、名古屋の『Hisaya-odori Park』の指定管理者である三井不動産株式会社が「公園×デジタル技術の可能性を検証し、新たな街づくりのモデルを創出していく」ために、さまざまな課題解決ロボットを募集しました。
そして当社が提案したロボットが今回の実証実験に採択され、3Dスキャナーを開発するバイトム株式会社(以下:バイトム)と共同で実証実験に参加しました。
※1 あいちロボットトランスフォーメーション(ARX)公式サイト https://aichirx.jp/
実証実験概要
(1)目的:広い公園における巡回警備のサポートをロボットが補い、駐輪禁止区域の自転車を減らす
『Hisaya-odori Park』には駐輪場が用意されているものの、駐輪禁止区域に多くの自転車が止められており、公園利用者の通行の妨げになる他、景観の悪化にも影響しています。また放置自転車が多い場所は管理不十分であると認識され、犯罪が起こりやすい場所になることも懸念されています。
しかし、1995年をピークに年々減少している生産年齢人口は、2050年には2021年から29.2%減の5,275万人になることが予測され※2、警備のための労働力が確保できなくなる可能性が生じています。
そこで自動走行ロボットによる24時間巡回警備による犯罪抑止と、3Dスキャナーを活用した放置自転車の発見による巡回警備のサポート、そして駐輪禁止区域の自転車を減らすことを目的として実証実験を行いました。
※2 内閣府(2022)「令和4年版高齢社会白書」https://www8.cao.go.jp/kourei/whitepaper/w-2022/zenbun/pdf/1s1s_01.pdf
(2)ロボットについて
●放置自転車を検出するという新規性
…当社がカスタマイズした搬送ロボットに、バイトムの3Dスキャナー『OWL(アウル)』を搭載しました。このスキャナーはリアルタイム3次元マッピングを行い、物体検知を可能とします。得たデータはネットワークを介して、PCやタブレットなどのデバイスで確認することができるため、管理者は管理室に居ながらにして園内の様子をリアルタイムに知ることが可能となります。自動運転の警備ロボットは存在しますが、このように自転車を検出できるロボットに新規性があると考えます。
●来園者のプライバシーを守る
…3Dスキャナーはカメラと異なり、撮影ではなく人物を物体として検出できます。スキャナーを採用することで、公園に訪れる方々のプライバシーを守ることに留意しました。また通常のカメラでは弱い、暗闇での物体検出も可能とします。
●テクノロジーソリューション企業ならではのロボットカスタマイズ
…商業施設や公園、倉庫など場所によってロボットに求められる機能や性能が異なります。しかし一般的にロボットを販売するメーカーでは汎用品を販売します。そこでそれら汎用のロボットをベースに、パーソルクロステクノロジーがお客さまに合わせたカスタマイズを施すことで個別最適化を行い、お客さまの課題解決に導きます。

パーソルクロステクノロジーが、公園警備に合わせて搬送ロボットの自動走行に関するセッティングを行い、あらかじめルートをマッピングする。写真は放置自転車を読み込んでいるところ。

今回搭載したバイトムの3Dレーザースキャナー『OWL』は、40mの距離が測定できるモデル。
(3)実証実験の結果
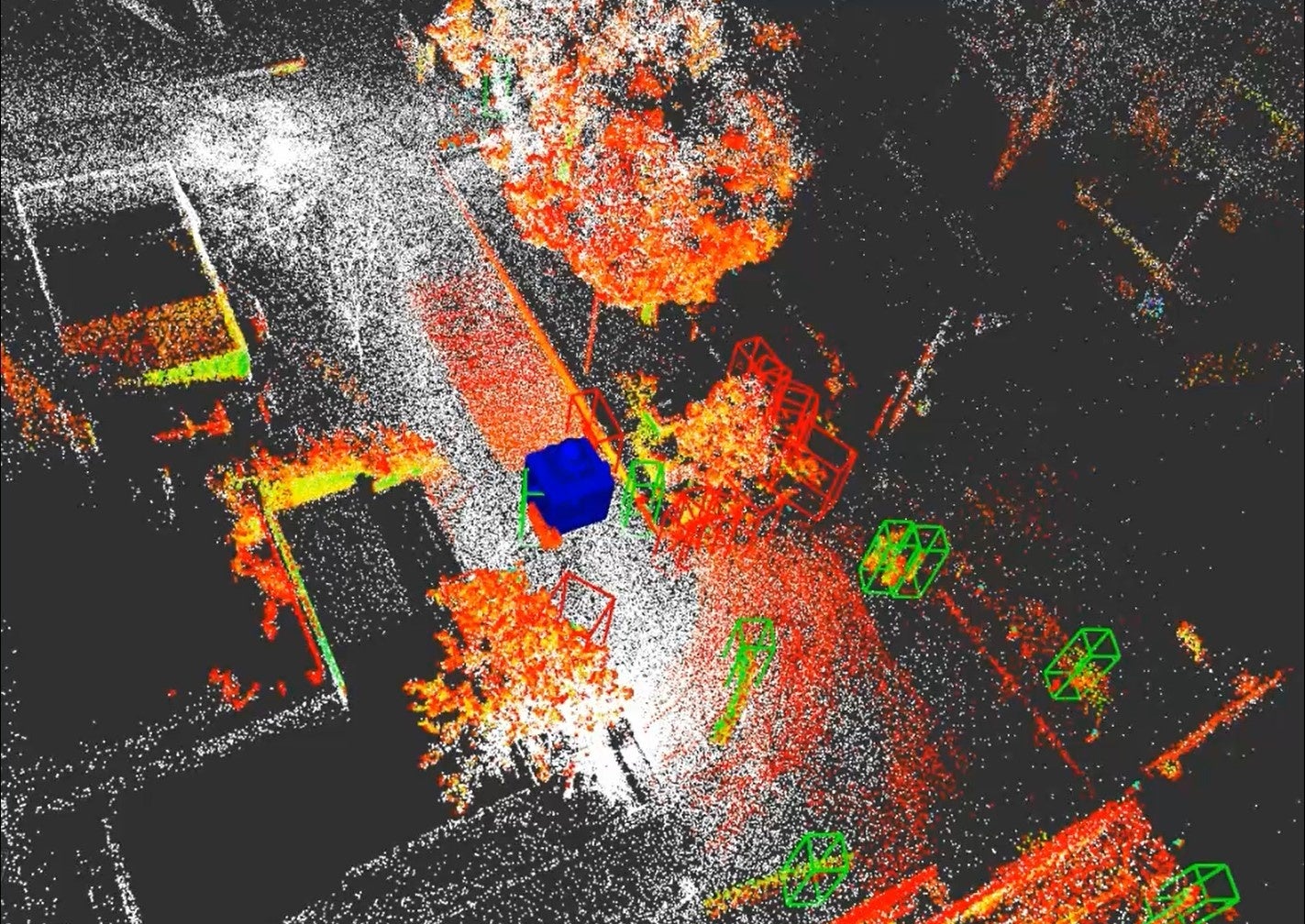
バイトムの3Dマッピング用のスキャナー『MK3』で事前に取得しておいた公園全体の点群データと、3Dスキャナー『OWL』で検知したデータを合わせることで、放置自転車(赤い四角)、人(緑の四角)の位置を把握可能。青いものが自動走行ロボット。(画像提供:バイトム)
今回の実証実験では、リアルタイムで届く点群データにより、離れた場所からでもPCなどで放置自転車の特定が可能であることを確認しました。事前に設定したルートをロボットが自動走行することで、警備員が公園内を歩き回る必要がなく、人材不足のサポートが可能であることも実証しました。
(4)今後の展開
今回の実証実験の結果を踏まえ、日本の社会課題である人材不足問題を解決するべく、人間とロボットが共存できる社会を目指してまいります。これまでは倉庫などでモノを運ぶために使用されていた搬送ロボットですが、3Dスキャナーと組み合わせることで巡回警備ができる自動走行ロボットとしてご提供可能となります。
『SMART MANUFACTURING SUMMIT BY GLOBAL INDUSTRIE※3』での展示
フランスで開催されている、ヨーロッパ最大級の産業展示会である『SMART MANUFACTURING SUMMIT BY GLOBAL INDUSTRIE(以下:SMS)』が、3月13日~15日に日本で初開催されました。ものづくり王国と言われる愛知県の会場には、製造業に関連する企業が国内外合わせ250社出展しました。その中でARXブースが設けられ、当社からも実証実験に参加したロボットを展示し、デモンストレーションを実施しました。
※3 SMART MANUFACTURING SUMMIT BY GLOBAL INDUSTRIE 公式サイト https://sms-gi.com/
パーソルクロステクノロジーでは、このように既存の技術を掛け合わせることで新しいサービスを生み出し、お客さまの課題解決に向けたご支援を行ってまいります。公園はもちろん工場や倉庫での巡回警備など、さまざまな環境や課題に合わせたソリューションのご提案が可能ですので、ぜひご相談ください。
・Webからのお問い合わせ(法人・個人)はこちら https://persol-xtech.co.jp/contact/
パーソルクロステクノロジー株式会社について<https://persol-xtech.co.jp/>
パーソルクロステクノロジー株式会社は、自動車・航空宇宙・産業機器・家電・ロボットといったものづくり領域から、システム、通信、WebといったIT領域までにおいて、技術コンサルティング、請負、技術者派遣、準委任にて、企業さまの技術支援をしています。私たちは、「尖った技術」の力で人と組織のはたらき方に変革を起こすことで社会課題を解決してまいります。
バイトム株式会社について<https://vitom-tech.com/>
バイトム株式会社は、社会的な人手不足と空間におけるデジタル化の課題をSLAM技術で解決し、自律産業を創造することを企業理念として掲げています。
SLAMや3次元スキャン製品を包括的に活用し、空間のデジタルデータの一元管理やプロセスの自動化ができるプラットフォームソリューションを提供することで社会に貢献します。簡便性(使いやすさ、スキャン/点群作成の所要時間の短縮等)を追求した精度の高いSLAMの開発に注力しています。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像