ARAV株式会社が開発した油圧ショベルの遠隔操作・自動運転システムで東亜建設工業株式会社の砂撒船の生産性向上活用

施工イメージ(バックホウ2台を1人で遠隔操縦)
熟練オペレータの減少、省人化や効率化が現場で求められている。
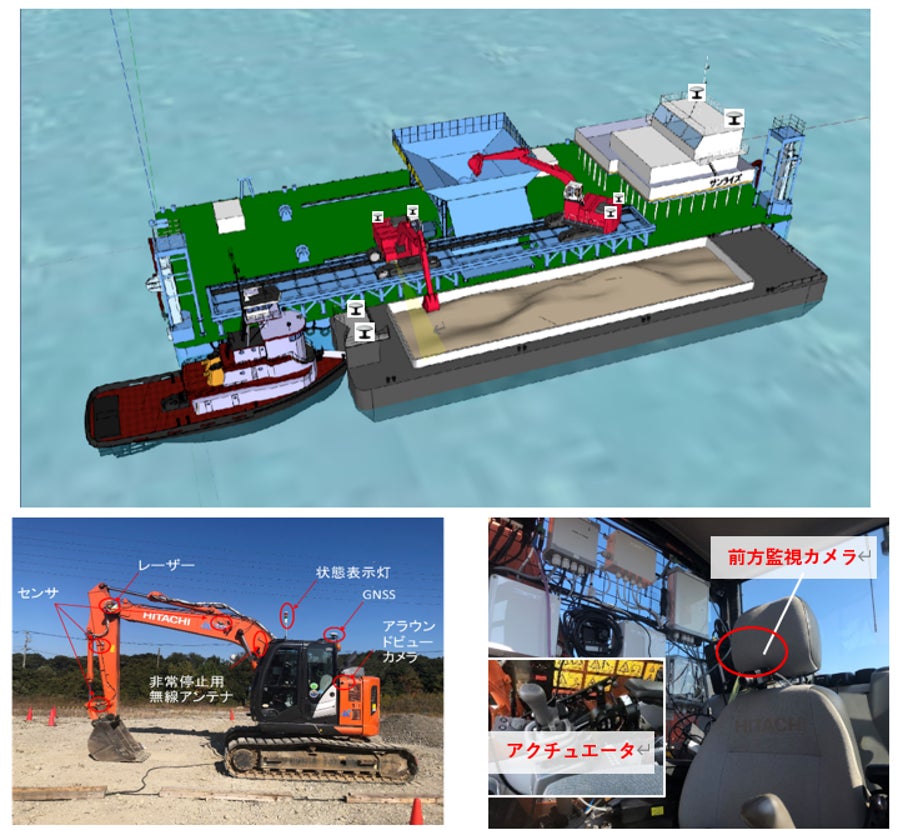
砂撒船は、港湾工事で利用される作業船の一種で、護岸基礎の築造や漁場として海域環境を改善するため海底に土砂を撒く作業を行っています。従来、砂撒船の土砂投入作業は2台のバックホウをそれぞれ複数のオペレータが交代しながら操作しています。また、海底に均一な厚さで土砂を撒くためには、掘削から投入までバックホウ同士が接触しないようお互いにタイミングを合わせる必要があり、作業時間と投入精度はオペレータの技能や経験に依存していました。
さらに、少子高齢化に伴う担い手不足より、熟練オペレータが減少していることから、自動運転による省人化・効率化が望まれていました。
遠隔操作・自動運転システムの概要
当社が開発した遠隔操作・自動運転システムは、国内市場における約84%(当社調べ)もの建設機械に対応が可能であり、ジョイスティックとフットレバーで操作するバックホウやキャリアダンプ、ステアリングとアクセル・ブレーキで操作するホイールローダー等、土木・建設現場で広く利用されている機体を対象としています。本システムは、各種センサーにより建設機械の状態や周囲の状況をリアルタイムに把握することができ、自動運転も可能です。
今回の実用化試験を経て、国内初の砂撒船バックホウ遠隔操作・自動運転を実現し、海上作業の生産性向上に貢献していきます。
実証実験について
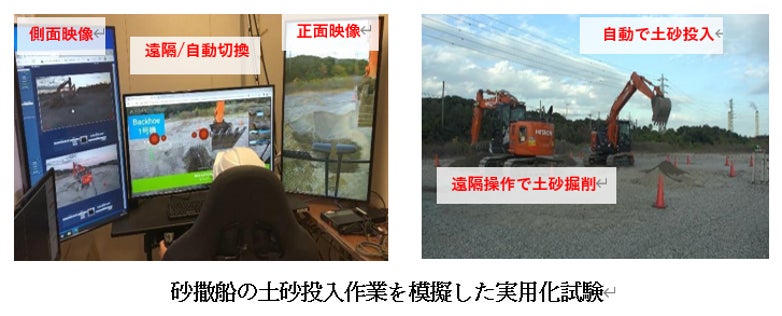
昨年末、東亜建設工業株式会社の千葉県袖ケ浦市にあるヤードにて砂撒船の土砂投入作業を模擬した2台のバックホウに本システムを導入し、実用化試験を行いました。検証では、2台のバックホウによる掘削作業を1名のオペレータが遠隔操作し、掘削後の旋回・投入作業を自動運転で行う一連の作業(掘削から投入)を適切に実行できるかの確認を行いました。検証の結果、お互いのバックホウが接触することなく一連の作業を交互に行うことができ、オペレータによる直接操作と変わらないサイクルタイムで作業ができることを確認しました 。
より安全で効率的な作業環境の実現に向けて、自動化を展開
今回の実用化試験において重機の遠隔操作・自動運転システムにより2台のバックホウを1名のオペレータが遠隔地から操作可能であり、オペレータの習熟度に関係なく効率的な運転が可能であることを確認しました 。
今後は、砂撒船のバックホウに本システムを導入するとともに、完全自動化を図る上で、掘削制御技術、障害物検知やトラブルを判断する技術、緊急時の対応などの課題を解決していき、より安全で効率的な作業環境の実現に向け取り組んでまいります。
また、同様に人材不足等で課題を抱える他業界に対しても、当社の技術を用いてDXの促進に貢献できるよう展開を進めてまいります。
社名:ARAV株式会社(よみ:アラヴ)
所在地:東京都文京区本郷7-3-1東京大学南研究棟アントレプレナーラボ
設立:2020年4月1日
代表者:白久 レイエス樹
公式HP:https://arav.jp/
遠隔自律装置の発注プラットフォーム
以下URLから無料でご利用頂けます。
https://shop.arav.jp/
共同実証実験パートナー募集のお知らせ
導入事例や今後の開発ロードマップなど、詳細な説明をご希望の方はぜひお気軽にお問い合わせをお願いします。ARAV株式会社は建設現場のDX・遠隔・自動化の共同実証実験パートナーを募集しています。
お問い合わせ
本件に関するお問い合わせはARAV株式会社公式HPまでお願い致します。
https://arav.jp/
担当:佐藤圭
すべての画像
