ローバー型ロボット制御システム AT-Drive™️用インターフェース基板「Moab」を発売
無人搬送ロボットなどの構築に便利なネットワーク接続型コンピューターインターフェースボード
株式会社アトラックラボ(埼玉県入間郡三芳町藤久保16-37 代表取締役 伊豆智幸 TEL 049-293-6138)は、合同会社ランニングエレクトロニクス(神奈川県相模原市南区新磯野2-1-5 アネックス新磯野ビル5F 代表 渋谷国広 TEL 042-705-7796)は、共同でロボット用マルチインターフェースを開発いたしました。
ローバーなどのロボットを開発する際に、インテルNUCなどのコンピューターと周辺デバイスの接続を用意にするネットワーク接続型インターフェースです。
メインコンピューター側通信ライブラリーとして、Moab ToolsをGitHubで公開しており容易に周辺機器のコントロールが可能となります。
AT-Drive™️環境は、ローバー型ロボット構築の総合環境です。ローバーモデルのソフト、ハード開発、開発支援を承ります。
【本件に関するお問合せ先】
株式会社アトラックラボ
メールアドレス:sales@attraclab.com
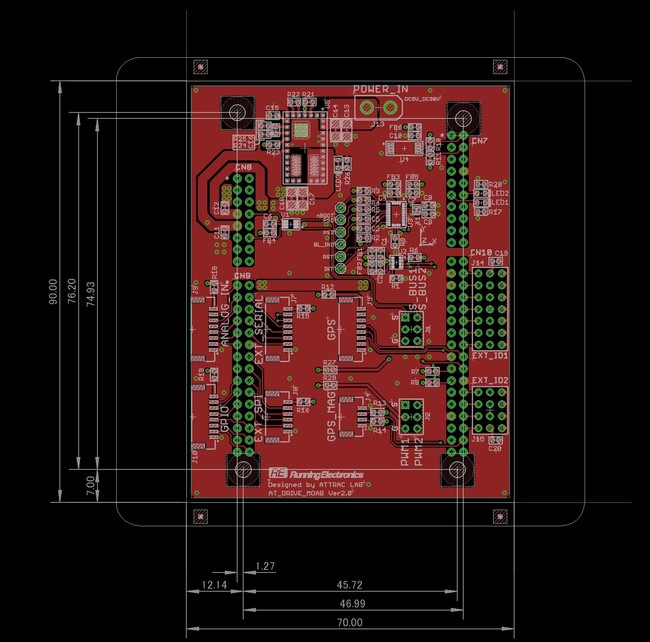
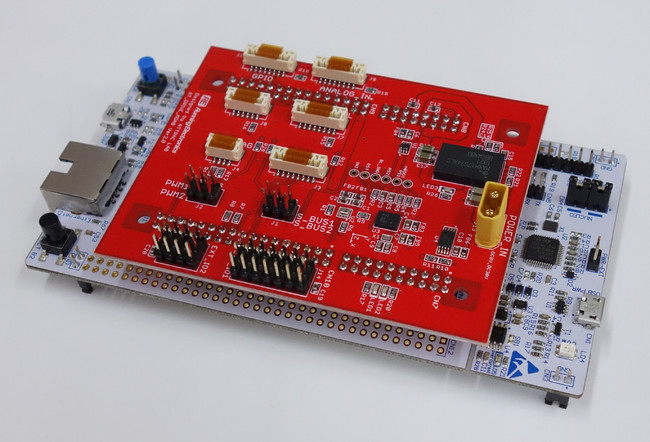 Moabシールド
Moabシールド
メインコンピューター側通信ライブラリーとして、Moab ToolsをGitHubで公開しており容易に周辺機器のコントロールが可能となります。
AT-Drive™️環境は、ローバー型ロボット構築の総合環境です。ローバーモデルのソフト、ハード開発、開発支援を承ります。
【本件に関するお問合せ先】
株式会社アトラックラボ
メールアドレス:sales@attraclab.com
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- 電子部品・半導体・電気機器ネットワーク・ネットワーク機器
- ダウンロード
