全方向へ移動可能な メカナムクローラー を試作
無限軌道の構造とメカナムホイールとを組み合わせた機構の実現を模索
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、無限軌道の構造にメカナムホイー
ルの機構を組み合わせた「メカナムクローラー」を試作しました。
ルの機構を組み合わせた「メカナムクローラー」を試作しました。
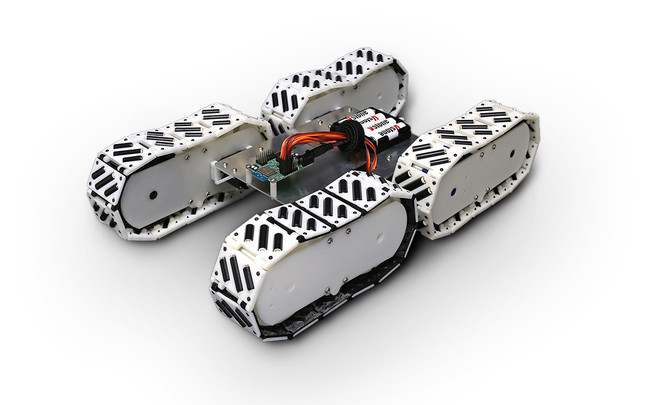 メカナムクローラー試作品
メカナムクローラー試作品
全方向へ移動が可能なメカナムホイール機構については、シンプルな制御で自由な移動を実現すること
が可能なため、自律制御台車などに広く用いられています。一方、悪路の走行などには適しておらず、メカナ
ムホイールを使用した台車の弱点となっています。
今回試作したメカナムクローラーは、様々な路面状況に適応しやすい無限軌道(クローラー構造)とメカナ
ムホイールとを融合させた車輪構造を持っています。これにより、従来のメカナムホイール搭載台車よりも、よ
り広範囲な路面状況に対応できることが見込まれるほか、無限軌道の車輪でありながら、「真横移動」などの
メカナムホイールに特有の移動を行うことが可能となりました。
今回の試作は基礎原理の確認と実証を目的としており、本格的な実用に向けては、解決すべき課題が多
数存在します。弊社におきましては、このような基礎的な試作、技術開発を今後も継続し、研究開発用台車ロ
ボットや学習用ロボット教材のさらなる改善、また全く新しいセグメントの製品開発など、様々な可能性を見据
えながら、具体的な製品化や製品への応用について挑戦を続けて参ります。
■試作品に関する動画
3Dプリンターを駆使して全方位移動無限軌道を作ってみた
https://www.youtube.com/watch?v=VM578wb0HcA


| 設計サイズ | W420×D250×H95(mm) |
| バッテリー | 単三形ニッケル水素バッテリー×4 |
| 制御基板 | V-duino |
| 搭載モーター | 無限回転サーボモーター×4 |
■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
すべての画像
