LiDAR搭載の学習用小型ロボット ライトローバー 出荷開始
リーズナブルな価格ながらLRFを搭載した卓上サイズロボットを量産出荷
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、既発表の小型学習用ロボット「ライトローバー」を、2021年2月26日に出荷開始しました。
 ライトローバー
ライトローバー
小型サイズのロボットでありながらLiDAR(LRF)を搭載しており、SLAMの実行など、現代的な台車ロボット制御を卓上で手軽に学習することができます。定価で5万円を切る低価格であることも大きな特徴で、高度なロボット学習をこれまで以上に身近なものとします。
■主な特徴
ライトローバーは、卓上サイズの扱いやすい台車ロボット筐体に、Raspberry Pi 4 Model B(RAM容量4GB版)と小型のLiDAR(LRF)を搭載した、学習用ロボット教材です。160mm四方の投影面積に収まるサイズで、机上での学習用途に好適なほか、限られたスペース内での動作が実現できるなど、これまで以上に多くの場面で活用が可能となりました。
小型サイズのロボットでありながらLiDAR(LRF)を搭載しており、SLAMの実行など、現代的な台車ロボット制御を卓上で手軽に学習することができます。定価で5万円を切る低価格であることも大きな特徴で、高度なロボット学習をこれまで以上に身近なものとします。
(1) Raspberry Pi 4 Model BとLiDAR(LRF)を標準搭載
ライトローバーには、小型の筐体ながら、RAM容量4GB版のRaspberry Pi 4 Model Bと小型のLiDAR(LRF)が標準搭載されています。現代的な台車ロボットの自律制御においては、以前にも増して演算能力が求められていますが、Raspberry Pi 4はそのニーズに十分に応えるプロセッシングスピードを提供します。LiDAR(LRF)は、昨今のスマートフォンや家電機器などにも搭載が進んでおり、高度化するロボティクス制御においては今後ますます重要性が増すデバイスであると考えられます。
これらのキーデバイスをコンパクトにパッケージした本製品は、自律制御の学習教材としてはもちろん、単純な台車制御という枠に留まらない全く新しいコンピューティングデバイスの創出にも繋がる、きわめて優れた教育材料であると言えます。
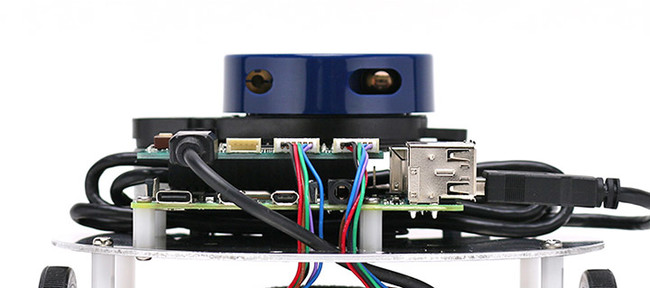 小型のLiDAR(LRF)を標準搭載
小型のLiDAR(LRF)を標準搭載
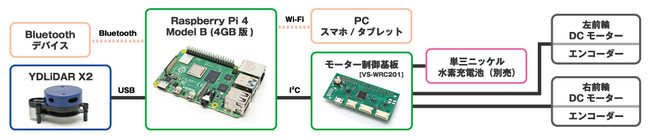
ライトローバーに搭載される2つの駆動用モーターには、標準でエンコーダーが搭載されており、回転量を正確に取得することが可能です。モーター回転量を元にしたPID制御による速度制御などを行えるほか、オドメトリ情報に変換し、SLAMや自律走行を実行するなど、様々なアプリケーションの学習および開発が可能です。
また、モーターの制御基板として「VS-WRC201」を新規開発し、エンコーダーからの出力値をRaspberry Pi 4に入力すると共に、効率の良いモーター回転制御を実現しています。
(3) モバイルバッテリーなどからの給電が可能
本製品では、標準の電源として単3ニッケル水素充電池を4本使用しますが、給電口となるモーター制御基板VS-WRC201の電源コネクターには、汎用のUSB micro B端子を採用しています。これにより、標準の電源以外にも、市販のモバイルバッテリーやACアダプターを接続することが可能です。
この工夫により、長時間の稼働が前提となる開発行程ではACアダプターを使用し、実際にロボットを動作させる場合には単3ニッケル水素充電池やモバイルバッテリーを使用するなど、場面・目的に合わせた給電方法を柔軟に選択できます。
なお、本製品には単3ニッケル水素充電池やモバイルバッテリー、ACアダプターなどは付属しません。
(4) 学習に必要なサンプルプログラムを付属
ライトローバーには、ROSの学習を手軽に進めることができるサンプルプログラムが付属します。サンプルプログラムをベースに、ROS経由でSLAMなどが実行できるので、台車ロボット制御の初学者でも、基本レベルから学習を進めていくことが可能です。学習をよりスムーズにするドキュメント類についても、標準で付属します。
■構成図

| サイズ | W160×D150×H116.8 (mm) |
| 本体重量 | 約516g(バッテリー含まず) |
| 本体材質 | アルミニウム |
| バッテリー | 単3ニッケル水素充電池×4 |
| 駆動方式 | 二輪駆動、後部ボールキャスター×1 |
| タイヤ直径 | 駆動輪:60mm、ボールキャスター:17.5mm |
| モーター | DCモーター×2 |
| 回転検出 | エンコーダー |
| 最高速度(実測値) | 0.6m/s (数値は開発時の実測で、路面状況などにより異なります) |
| 制御基板 | Raspberry Pi 4 Model B(RAM容量4GB版) VS-WRC201 |
| SDK | ROSパッケージ |
| 収録サンプル (※) 本製品に含まれないライブ ラリなどのセットアップが追加で 必要になる場合があります |
ROS用サンプルコード ゲームパッドからの操作 マウス(タッチパッド)からの操作 SLAM(gmapping) navigation |
| インターフェース | USBシリアル、Wi-Fi、Bluetooth、I2C |
(※) 本製品にはRaspberry Pi用のmicroSDカードは付属しません。
■販売について
ヴイストン株式会社の公式Webショップにてご購入いただけます。
・ライトローバー :45,000円(税別)
製品ページ: https://www.vstone.co.jp/products/lightrover/
■関連動画
弊社公式のYouTubeチャンネルにて、ライトローバーに関連した動画を公開しております。また今後、継続して投稿して参りますので、ぜひお役立てください。
【ライトローバー使い方解説】#1 必要機材とOSイメージの書き込み
https://www.youtube.com/watch?v=_8MTu8oMjGA

https://www.youtube.com/watch?v=JIxzjZ2jTmY

■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
Bluetooth®はBluetooth SIG, Inc. USAの登録商標または商標です。
microSDロゴ、microSDは、SD-3C LLCの登録商標または商標です。
Raspberry PiはRaspberry Pi財団の登録商標または商標です。
ROSはOpen Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
Wi-FiはWi-Fi Allianceの登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
すべての画像
