ドローンを、複数の俯瞰カメラで連続的に制御する技術を開発
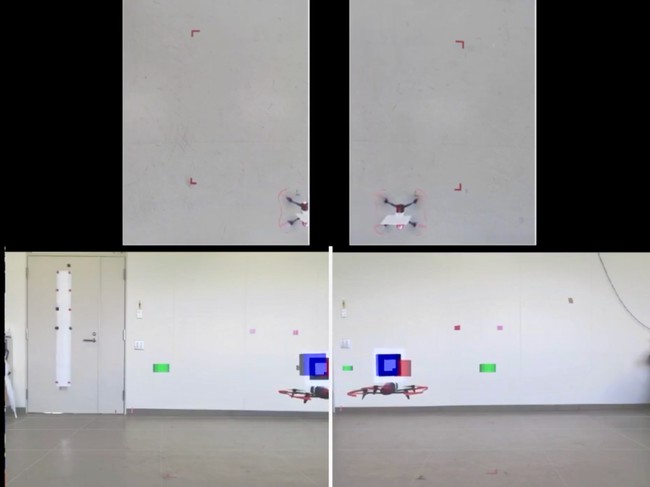
GPSのない環境で、ARマーカーを使いドローンを3次元空間で制御。
株式会社アトラックラボ(埼玉県入間郡三芳町藤久保16-37 代表取締役 伊豆智幸 TEL 049-293-6138)と、国立大学法人 佐賀大学(佐賀県佐賀市、学長:兒玉浩明)は、共同でARマーカーを活用した屋内でのドローン制御を開発いたしました。
ドローンに搭載したARマーカーを、俯瞰カメラによって認識させ、ドローンの3次元オドメトリーを行う。さらに異なる場所に設置された複数のカメラをまたいで位置情報を計算する事ができるため、長い廊下など一箇所のカメラではカバーできない広範囲の制御を可能とした。
ARマーカーを使用した制御アルゴリズムは、佐賀大学教育研究院自然科学域理工学系の佐藤和也教授が開発、ドローンに実装した。アトラックラボは、ドローンの自律制御や通信などを担当。
従来、数cm程度の制御を行うためには、Lidarやステレオカメラが必要であった。この方式では、安価なWEBカメラなどが使用できるため、コスト的に大きなアドバンテージがある。
今後ドローンだけでなく、ビニールハウスで自律運転するローバー(車両型ロボット)の制御など、コストの制限が大きい農業分野などに応用していく。
【本件に関するお問合せ先】
株式会社アトラックラボ
メールアドレス:sales@attraclab.com
ARマーカーを使用した制御アルゴリズムは、佐賀大学教育研究院自然科学域理工学系の佐藤和也教授が開発、ドローンに実装した。アトラックラボは、ドローンの自律制御や通信などを担当。
従来、数cm程度の制御を行うためには、Lidarやステレオカメラが必要であった。この方式では、安価なWEBカメラなどが使用できるため、コスト的に大きなアドバンテージがある。
今後ドローンだけでなく、ビニールハウスで自律運転するローバー(車両型ロボット)の制御など、コストの制限が大きい農業分野などに応用していく。
【 佐藤和也教授 】 佐賀大学教育研究院自然科学域理工学系 教授。制御工学の理論とその応用の研究に従事。 現在,理工学系副学系長,公益社団法人計測自動制御学会理事。2003年よりカメラに映る 移動体の3次元空間内における位置制御に取り組む。講談社より「はじめての制御工学」(現在,第2版)、 「はじめての現代制御理論」、「はじめての線形代数学」を出版。「はじめての制御工学」は 2013年計測自動制御学会著述賞を受賞。
【本件に関するお問合せ先】
株式会社アトラックラボ
メールアドレス:sales@attraclab.com
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- システム・Webサイト・アプリ開発アプリケーション・セキュリティ
- ダウンロード
