物流ピッキングロボット遠隔操作時の力覚フィードバック効果の調査研究を実施 ―物流自動化ソリューション「PROGRESS ONE(プログレスワン)」の事業化に向けた取り組み―
遠隔操作ロボットシステムにおいて、オペレーターが遠隔地から物流現場にあるロボットでピッキング作業を行う際に、操作画面による視覚的な判断だけでは、遠隔での把持(しっかりものをつかむ)操作が困難であることが課題となっていました。「プログレスワン」の事業化を進めるにあたり、視覚に加え、力覚フィードバックで操作性を高める開発・研究が必要でした。
本研究は、ピッキングなどの物流施設内作業を想定した遠隔操作ロボットシステムにおいて、オペレーターが遠隔地からディスプレイを見ながら作業を行う際に、複雑な動作になるほどロボットが物体と接触した時の引っ張られる・押されるなどの力覚情報を人に知覚させる力覚フィードバックの重要性を実証するとともに課題を検討しました。実験結果から、力覚フィードバックが遠隔での把持操作や緩衝材の押し込みを効率的に行うために必要不可欠な機能であること、オペレーションの熟練者と初心者ではそれぞれ必要とする補助機能が異なることなどが明らかになりました。
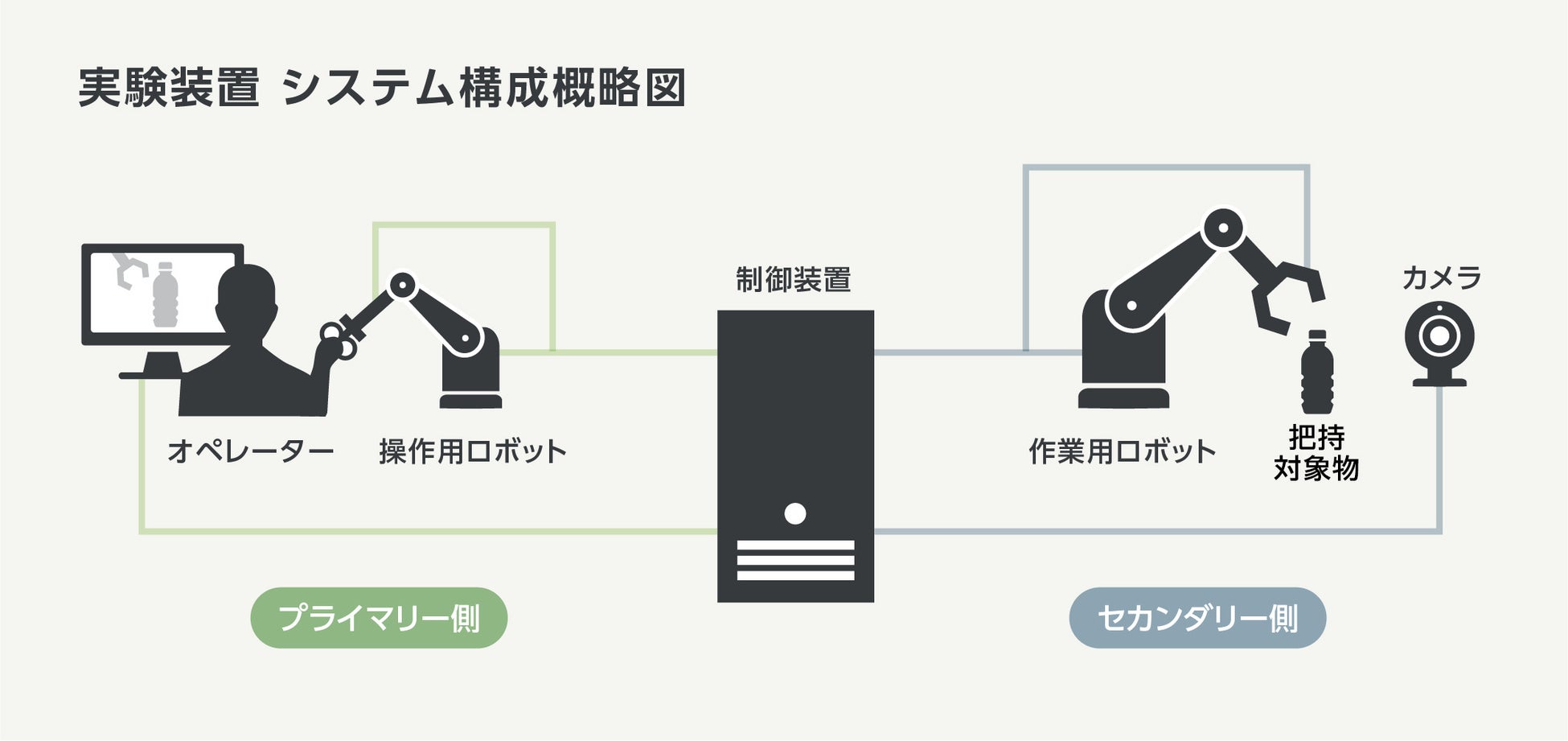
 遠隔操作ロボット実験装置
遠隔操作ロボット実験装置
この研究は、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)が昨年22年度に公募したプロジェクト「ロボットによる社会変革推進に向けたロボット・AI部事業の周辺技術・関連課題に係る先導調査研究」として採択されました。また、「第41回日本ロボット学会学術講演会(RSJ2023)」のオープンフォーラム(2023年9月11日開催)にて講演を行いました。

□国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)ウェブサイト
「第41回日本ロボット学会学術講演会(RSJ2023)」オープンフォーラムの開催
※「株式会社オカムラ サイズや出力が異なるロボットの遠隔操作時の力覚フィードバック効果の先導調査研究」PDFの掲載あり
https://www.nedo.go.jp/events/CD_100184.html
■研究の概要
本研究では、オペレーターが遠隔地からディスプレイを見ながら作業を行う際の力覚フィードバックに関する課題の特定と課題解決の検討のため、2段階で実験を行いました。
まず、同じ型式のロボット2台を接続してオペレーター(プライマリー側)と作業用ロボット(セカンダリー側)で出力差がある遠隔操作環境を簡易的に構築し、物流現場で想定される遠隔操作作業(デモ作業)を通して、力覚フィードバックの有無が遠隔操作に与える影響を定量的・定性的に確認しました。力覚フィードバックには、リアルハプティクス®※を搭載したシステムを使用しました。物流現場のピッキングや緩衝材を詰める作業において適切な変位や力の増幅率が、遠隔操作に与える効果を確認しました。また、オペレーターが操作を行う際に、リアルな操作感を再現するための変位や力について課題を特定しました。
次に、プライマリー側とセカンダリー側で大きさの違うロボットを用いて、同じ型式での実験で効果がみられた倍率の組み合わせを検証しました。変位や力についての課題解決として、オペレーターの補助機能となるディスプレイに表示するユーザーインターフェース(UI)の有効性を確認しました。
※アクチュエータの力加減を自在に制御することができる技術。本研究では、この技術を簡便に実装できるモーションリブ株式会社の汎用力触覚ICチップ「AbcCore®」を搭載したシステムを使用。
□実験の様子動画(YouTube)
■主な研究結果
・ロボットの遠隔操作において、力覚フィードバックは、ピッキング作業や緩衝材の押し込みを効率的に行うために必要不可欠な機能であることを確認しました。力覚フィードバックがない場合、対象物を倒したり、つかみ損ねて破損させたりして、把持に失敗することがあります。
・ロボットの遠隔操作において、オペレーターが熟練者である場合と初心者である場合では、必要とする補助機能が異なることが確認できました。熟練者は、視覚補助や空間認識補助、力覚認識の補強に影響するUIは必要としませんが、移動量と力の倍率を自身で変更できるスケールセレクタ機能は有効でした。初心者は、視覚補助や空間認識補助、力覚認識の補強に影響するUIにより、作業効率の向上や心理的負担の軽減を図ることができます。
オカムラは、これらの研究結果を生かし「PROGRESS ONE」の事業化に向けた研究や開発を進めてまいります。
新しい技術やアイデアを取り入れ、より優れたロボット技術の開発を行うことで、物流業界のさらなる発展に貢献します。
―「PROGRESS ONE」について―
「PROGRESS ONE」は、オカムラが事業化を進めている、AIを搭載したロボットによる自律ピッキングとロボット単独では難しい作業を遠隔操作技術の活用により、人が倉庫から離れた場所でロボット操作を行い遠隔でピッキング作業を行うハイブリッド型の物流自動化ソリューションです。AIを活用したロボットの自律動作とオペレーターによる遠隔操作を使い分けるハイブリッド動作制御を実現し、従来の自律型ロボット単独では難しい作業や多種多様な商品への対応が可能です。AI搭載ロボットを操作するオペレーターは、倉庫から離れた都市部や住宅地などの利便性のよい場所に設けられたオペレーションセンターへ勤務し遠隔操作を行うことができ、物流現場での新しい働き方を実現します。これにより、従来の運用では時間や場所、身体などの制約によって物流現場で働くことが難しかった働き手へ雇用を創出します。
「PROGRESS ONE」という名称は、“Picking Robot of Grateful Engineering Smart System”の略称であると同時に、物流業界における働き方を前に進める一助となるとの意味を込めています。
参考
□オカムラ 2022年3月1日ニュースリリース
ハイブリッド型の物流自動化ソリューション「PROGRESS ONE(プログレスワン)」、 AI搭載の自律ピッキングロボットと遠隔操作システムのプロトタイプを公開
https://www.okamura.co.jp/corporate/news/product/2022/progress_one_prototype.html
□オカムラ 2022年1月24日ニュースリリース
物流施設においてAI搭載ロボットと遠隔操作技術を組み合わせピッキング作業の自動化を実現する「PROGRESS ONE(プログレスワン)」の事業化に着手
https://www.okamura.co.jp/corporate/news/product/2022/progress_one.html
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像