オムロン 技術・知財本部とオムロン サイニックエックス、ロボティクス分野のトップカンファレンス「IROS 2024」で最新の研究成果を発表

オムロン株式会社(本社:京都市下京区、代表取締役社長CEO:辻永順太、以下 オムロン) 技術・知財本部と、オムロン サイニックエックス株式会社(本社:東京都文京区、代表取締役社長:諏訪正樹、以下 OSX)は、「The 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)」にて最新の研究成果を、8件(内、技術・知財本部1件、OSX 7件)発表します。また、発表する8件の研究論文のうち、5件はORAL PRESENTATIONSです。
「IROS」は、「ICRA」とならび、ロボティクス分野において世界最大かつ最も影響力のあるトップカンファレンスの一つです。2024年は3,344件の投稿の中から、1,587件(約47%)の論文が採択され、10月14日から18日にかけてアラブ首長国連邦・アブダビで開催されます。技術・知財本部からは「低コスト・高速・頑健なバラ積みピッキングシステム」について発表します。また、OSXからは「ヒューマン・ロボット・インタラクション研究のための安価なエアホッケープラットフォーム」や「シミュレーションから学習し実世界での追加学習なしに部品挿入を実現するソフトロボット "Saguri-bot(サグリボット)"」、「複数モバイルロボットの協調移動により物体を操作する技術」などについて発表します。
さらに、Senior Researcherの田中一敏らの研究論文は、「IROS Best Entertainment and Amusement Paper Award sponsored by JTCF」のFinalistsに選出されています。本論文は、Finalistsに選出された4件の一つです。
IROS 2024で発表する各論文の詳細は、それぞれ関連ページのリンクからご確認ください。
ORAL PRESENTATIONS:IROS2024での口頭発表形式はORAL PRESENTATIONS(口頭発表15分)とORAL PITCH PRESENTATIONS(口頭発表3分とポスター発表)に分かれています。
ICRA: IEEE International Conference on Robotics and Automation
■技術・知財本部の発表論文
A Low-Cost, High-Speed, and Robust Bin Picking System for Factory Automation Enabled by a Non-stop, Multi-View, and Active Vision Scheme
※日本語訳:ノンストップ・多視点・アクティブビジョン方式によるファクトリーオートメーション向けの低コスト・高速・頑健なバラ積みピッキングシステム

|
著者 |
Xingdou Fu (OMRON), Lin Miao (OMRON), Yasuhiro Ohnishi (OMRON), Yuki Hasegawa (OMRON), and Masaki Suwa (OMRON) |
|
発表セッション |
10/18(金) 9:00-10:00 ※発表日時は現地時間 Paper FrPI6T4.3(ORAL PITCH PRESENTATIONS) |
|
関連ページ |
■OSXの発表論文
Low-cost air hockey robot using a five-bar linkage mechanism driven by position-control servomotors
※日本語訳:位置制御サーボモータと五節リンク機構を用いた安価なエアホッケーロボット研究プラットフォーム
|
著者 |
Mirai Shinjo (University of Toronto / OSXインターン: 2023年5月~2023年8月), Cristian Camilo Beltran-Hernandez (OSX), Masashi Hamaya (OSX), and Kazutoshi Tanaka (OSX) |
|
発表セッション |
10/16(水) 17:00-17:15 ※発表日時は現地時間 Paper WeCT2.3(ORAL PRESENTATIONS) |
|
関連ページ |
※IROS Best Entertainment and Amusement Paper Award sponsored by JTCFのFinalistsに選出
Visuo-Tactile Zero-Shot Object Recognition with Vision-Language Model
※日本語訳:視覚言語モデルを利用した視触覚情報からのゼロショット物体認識
|
著者 |
Shiori Ueda (Keio University), Atsushi Hashimoto (OSX), Masashi Hamaya (OSX), Kazutoshi Tanaka (OSX), and Hideo Saito (Keio University) |
|
発表セッション |
10/17(木) 9:00-10:00 ※発表日時は現地時間 Paper ThPI4T4.16(ORAL PITCH PRESENTATIONS) |
|
関連ページ |
Language-Guided Pattern Formation for Swarm Robotics with Multi-Agent Reinforcement Learning
※日本語訳:複数エージェント強化学習を用いた群ロボットの言語誘導隊列形成
|
著者 |
Hsu-Shen Liu (National Tsing Hua University), So Kuroki (OSX), Tadashi Kozuno (OSX), Wei-Fang Sun (NVIDIA AI Technology Center), and Chun-Yi Lee (National Tsing Hua University) |
|
発表セッション |
10/17(木) 11:15-11:30 ※発表日時は現地時間 Paper ThBT14.2(ORAL PRESENTATIONS) |
|
関連ページ |
https://omron-sinicx.github.io/language-guided-pattern-formation/ |
Robot Swarm Control Based on Smoothed Particle Hydrodynamics for Obstacle-Unaware Navigation
※日本語訳:障害物非認識環境のための流体挙動模倣による群ロボットナビゲーション
|
著者 |
Michikuni Eguchi (Cluster Metaverse Lab / University of Tsukuba), Mai Nishimura (OSX), Shigeo Yoshida (OSX), and Takefumi Hiraki (Cluster Metaverse Lab) |
|
発表セッション |
10/17(木) 11:30-11:45 ※発表日時は現地時間 Paper ThBT14.3(ORAL PRESENTATIONS) |
|
関連ページ |
Robotic Object Insertion with a Soft Wrist through Sim-to-Real Privileged Training
※日本語訳:柔軟手首を持つロボットのSim-to-Real部品挿入学習

|
著者 |
Yuni Fuchioka (ETH Zurich / OSXインターン: 2023年6月~2023年12月), Cristian Camilo Beltran-Hernandez (OSX), Nguyen Hai (Northeastern University / OSXインターン: 2023年5月~2023年9月), and Masashi Hamaya (OSX) |
|
発表セッション |
10/17(木) 15:30-16:30 ※発表日時は現地時間 Paper ThPI5T2.5(ORAL PITCH PRESENTATIONS) |
|
関連ページ |
https://www.youtube.com/watch?v=YdnnlbKd7Oc |
Multi-Agent Behavior Retrieval: Retrieval-Augmented Policy Training for Cooperative Push Manipulation by Mobile Robots
※日本語訳:経験データベースの検索による複数モバイルロボットの物体操作学習
|
著者 |
So Kuroki (OSX), Mai Nishimura (OSX), and Tadashi Kozuno (OSX) |
|
発表セッション |
10/18(金) 10:45-11:00 ※発表日時は現地時間 Paper FrAT3.4(ORAL PRESENTATIONS) |
|
関連ページ |
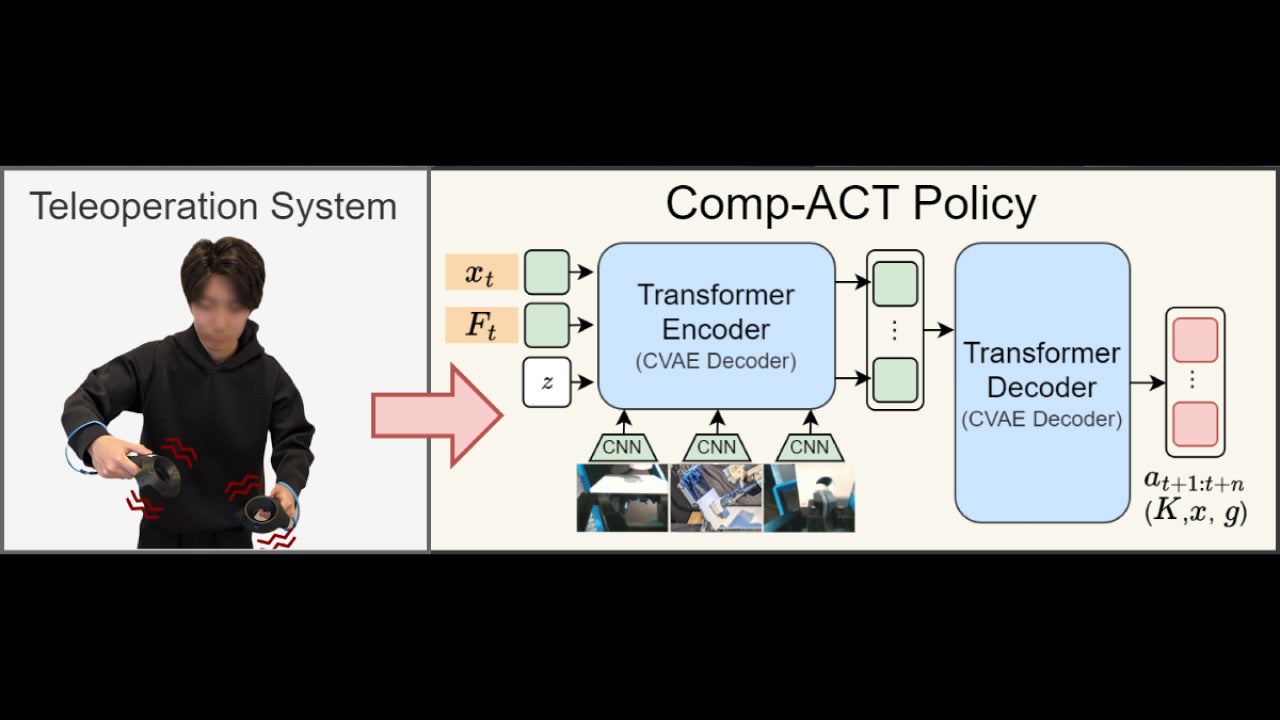
Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System
※日本語訳:触覚フィードバックを持つ遠隔操作システムを使用した双腕コンタクトリッチマニピュレーション模倣学習
|
著者 |
Tatsuya Kamijo* (University of Tokyo / OSXインターン: 2023年10月~現在), Cristian Camilo Beltran-Hernandez* (OSX), and Masashi Hamaya (OSX) *: Equal contribution |
|
発表セッション |
10/18(金) 10:30-10:45 ※発表日時は現地時間 Paper FrAT3.3(ORAL PRESENTATIONS) |
|
関連ページ |
https://www.youtube.com/watch?v=afNQjGoqBB8 |
オムロングループの業績一覧については以下をご参照ください。
https://www.omron.com/jp/ja/technology/publications/
技術・知財本部について
オムロングループのコーポレートR&D部門として、コア技術である「センシング&コントロール+Think」を進化させながら、近未来に起こりうる社会的課題を先取りし、それらを解決するソーシャルニーズの創造に取り組んでいます。創業者の経営理念「機械にできることは機械に任せ、人間はより創造的な分野で活動を楽しむべきである」を拠り所に、人の可能性を広げ、人がもっと活躍できる未来の実現を目指し、AI・ロボティクス・エネルギーマネジメント・センシングなどさまざまな研究開発活動をおこなっています。
◆オムロンのテクノロジー:https://www.omron.com/jp/ja/technology
◆技術・知財本部の採用情報:https://www.omron.com/jp/ja/recruit/technology/
◆オムロンの総合お問い合わせはこちら
オムロン サイニックエックス株式会社について
オムロン サイニックエックス株式会社は、オムロンが考える"近未来デザイン"を創出する戦略拠点です。「AI」「ロボティクス」「IoT」「センシング」など、幅広い領域の最先端技術のトップ人財が研究員として在籍し、社会的課題を解決するために、技術革新をベースに「ビジネスモデル」「技術戦略」「知財戦略」を統合し具体的な事業アーキテクチャに落とし込んだ"近未来デザイン"を創り出します。また、大学や社外研究機関との共同研究を通じて「近未来デザイン」の創出を加速していきます。
◆OSXのホームページ:https://www.omron.com/sinicx/
◆OSXの最新の活動:https://www.omron.com/sinicx/activity/
◆OSXの活動についてのお問合わせはこちら
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像