NVIDIA、自律走行車を衝突から守る計算型の防衛ドライビングポリシー「DRIVE AV Safety Force Field」を発表
精密な計算に裏打ちされ、シミュレーションで検証済みの安全運転決定アルゴリズムが
予測不可能な現実世界の交通から車両と道路利用者を守る
予測不可能な現実世界の交通から車両と道路利用者を守る
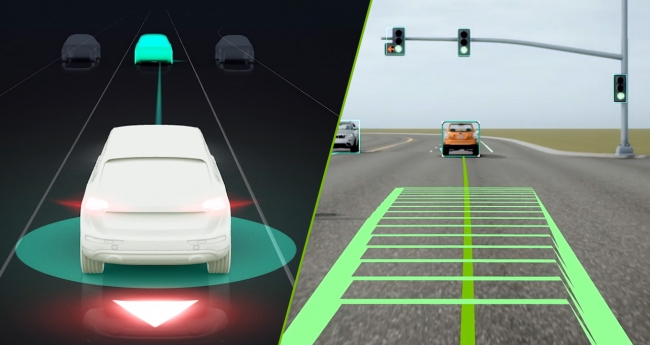
SFF はセンサーデータを取り込み、周辺環境のダイナミクスを分析・予測、自らの行動の組み合わせを決定することで、車両や道路利用者を保護します。SFF フレームワークは、自らの行動が危険な状況を生んだり、あるいは危険な状況へエスカレートしたり、またはそのような状況を招く一因とならないようにすることに加え、潜在的な危険を軽減するために必要な行動も含みます。
堅牢な計算に支えられたSFFは、限られた統計によって現実世界の複雑なシナリオをモデル化しようとする試みと異なり、車両の衝突が数学的にゼロになるような検証に基づいた安全性を実現します。SFFは、 NVIDIA DRIVE プラットフォーム上で実行され、車両センサーから入力されるデータに対してフレームごとに物理学ベースの計算が行われます。
SFF はさらに、現実世界のデータに加え、ビット単位で正確なシミュレーションも利用して検証されます。この検証には、現実世界で再現するには危険すぎる、公道や都市での走行シナリオも含まれます。
危険な状況を軽減し衝突を排除する
米国運輸省の国家道路交通安全局は、衝突の約 94 パーセントがヒューマンエラーによるものと推定しています。業界全体が自律走行車の開発を通じて、交通事故ゼロの社会を実現するため動いています。パスプランニング、予測及び SFF などの安全性機能による DRIVE AV プラットフォームの増強は、この目標達成のための前進になるでしょう。
SFF で独特といえるのが、ブレーキとステアリング両方の制約を考慮に入れている点です。この二重の配慮により、両者が別々に対応されている場合に発生する、いくつもの問題的な車両挙動の異常を排除できました。このポリシーは、衝突回避というコアとなる原則に沿ったもので、多くのルールや予想を基にしたものとは対照的です。
NVIDIA の自動運転ソフトウェア担当 バイスプレジデントのデビッド・ニスター (David Nister) は次のように述べています。「運転の方程式からヒューマンエラーを排除することにより、衝突の大半を予防し、発生する衝突のインパクトを最小化することができます。SFF を搭載した自律走行車は、まるで反発する磁石のように自らを危険から遠ざけつづけ、また、自らが危険な状況を作り出す一因にもならないよう、設計されているのです」
オープンで、高い透明性
SFF はオープン プラットフォームで、どんなドライビング ソフトウェアとも組み合わせることが可能です。行動計画を行うスタックにおける安全性決定ポリシーとして、SFF は危険な行動を監視・予防します。SFF は、複雑なルールを数多く組み合わせた障害物回避とは明確に異なります。NVIDIA DRIVE のような高性能なコンピューティング プラットフォーム上でSFFを実行すると、多様性と冗長性が生まれ、最高レベルの安全性が実現されます。
Safety Force Field のより詳しい情報については www.nvidia.com/sffをご覧ください。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- 電子部品・半導体・電気機器自動車・カー用品
- ダウンロード
