デンソーウェーブ、ROBOT TECHNOLOGY JAPAN 2026に出展
―現場が求めるロボット技術を多数紹介ー

株式会社デンソーウェーブ(本社:愛知県知多郡阿久比町、代表取締役社長:相良隆義)は、2026年6月11日(木)~6月13日(土)にAichi Sky Expo(愛知県国際展示場)で開催される「ROBOT TECHNOLOGY JAPAN 2026」に出展します。
本展示では、デンソーの「次世代工場に向けたロボット活用の取り組み」や「現場で培ってきたロボット活用事例」を中心に、3Dビジョンによる高度な画像処理技術や、ラボラトリオートメーションをはじめとする製造工程以外の領域にも広がるロボットソリューションをご覧いただけます。ぜひ会場でご体感ください。
■ デンソーウェーブ「ロボットテクノロジージャパン2026」出展特設ページ
出展内容については下記Webページでもお知らせしています。
ROBOT TECHNOLOGY JAPAN 2026 | デンソーウェーブ
■ 展示会概要
名 称: ROBOT TECHNOLOGY JAPAN 2026
会 期: 2026年6月11日(木) ~ 6月13日(土)
時 間: 10:00~17:00 ※最終日は16:00まで
会 場: Aichi Sky Expo(愛知県国際展示場)
〒479-0881愛知県常滑市セントレア5丁目10-1
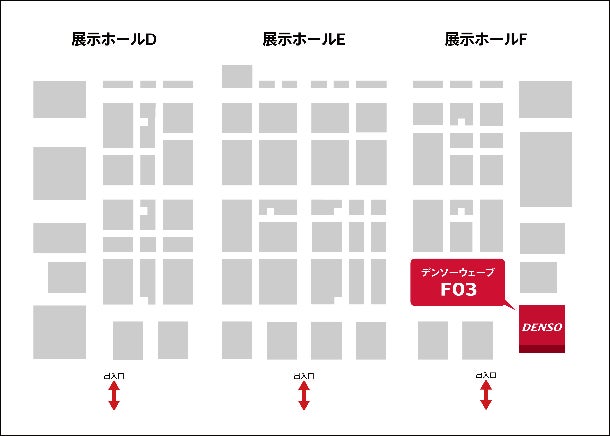
小間番号: 展示ホールF F-03
■ 主な展示内容
1)デンソーの次世代工場に向けたロボット活用の取り組み
デンソーが目指す次世代工場におけるデンソーロボットの取り組みをご紹介します。高速人協働ロボット「COBOTTA PRO」を活用し、実装機のリール供給やかんばん挿入の自動化をご提案します。また、デンソー先端技術研究所が開発したAI アルゴリズムによる最適動作経路の自動生成の体験など、デンソーの先端技術を実感いただける展示をご用意しています。
2)AI 搭載 3D ビジョンを活用した高難度作業の自動化
3D ビジョン「Mech-Eye」を活用し、ラフ置き状態のラジエータの認識および異品検査を実施します。ディープラーニング技術によって認識精度を向上させ、安定稼働を実現するアプリケーションをご紹介します。また、3D ビジョン「Cambrian ビジョンシステム」では、従来認識が難しかった軟体物であるハーネスのドアインナーパネルへの配索自動化や、透明体の認識・トラッキング技術をご紹介します。
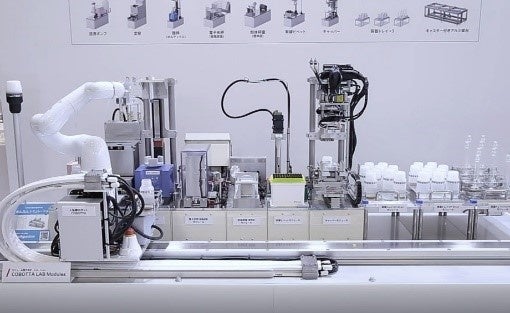
3)進化する研究ニーズに応えるモジュール型ラボラトリオートメーション
研究の可能性を広げる先進的なラボソリューション「COBOTTA LAB Modules」を出展します。標準化されたモジュールを自由に組み合わせることで、多様な現場ニーズに対応する柔軟な自動化ソリューションです。
■ 出展デモ機一覧
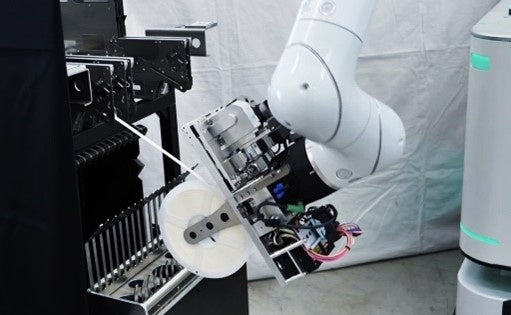
部品供給作業の省人化
デンソー実例 / 実装機へのリール供給
COBOTTA PROとAMRを組み合わせたモバイルマニピュレータを活用し、従来は人がおこなっている実装機へのリール供給作業を自動化します。QRコード位置補正と制振機能で、再ティーチング不要の座標補正とサイクルタイム短縮を実現します。
出荷作業の自動化(かんばん入替)
デンソー実例 / 通い箱のかんばん入替・ふた・搬送
COBOTTA PROと自社開発の物流ハンドにより、かんばん挿入・取出、通い箱のハンドリングをツール交換不要で実現。工場内物流の自動化を実現し生産効率の向上に貢献します。

変種変量生産へ対応した次世代生産システム
デンソー実例 / EV等の次世代製品向け組立工程(株式会社デンソー 大安製作所)
自動車の電動化や製品バリエーションの多様化に対応するため、標準化された生産ユニットの組み替えで、多品種・少量対応、混流生産を実現。

品質検査のコンパクトな自動化
デンソー実例 / ロボットと走行軸を活用したモータ部品の画像寸法検査(株式会社デンソー 湖西製作所)
COBOTTAと走行軸、測定器の組み合わせにより、部品の品質検査を省人化します。走行軸との連携で動作範囲を拡張し、ロボット1台での自動化を実現。導入コストや設置スペースを抑えながら、投排出を含めた検査全体を自動化します。

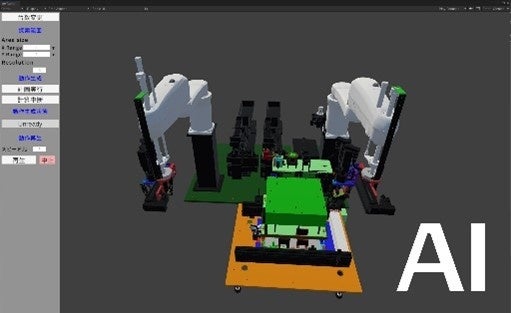
AIで最短経路を自動生成
デンソー実例 / ロボット動作経路の検討・作成(株式会社デンソー 先端技術研究所 AI研究部 知能ロボティクス研究室)
デンソー独自のAIアルゴリズムがロボットの最適配置の自動探索や、障害物を回避しながら最短のサイクルタイムとなる経路の自動生成を行います。従来、試行錯誤を重ねていた調整が不要になり、短時間で生産性の高い設備立ち上げを実現します。
COBOTTA PROの高速性
高速動作のデモンストレーション
COBOTTA PROは高剛性高精度のトルクセンサを各軸に搭載。加減速に優れ、制御性能を損なわず高精度な作業が可能です。さらに、タッチセンシングソフトカバーで安全性を高めながら協働運転時の速度を向上し、生産性を高めます。協働ロボットの中でもトップクラスの高速・高精度な動作性能を、ぜひご体感ください。

柔軟でスマートなラボ自動化システム
事例 / HPLC前処理〈COBOTTA LAB Modules〉
COBOTTAと、独自開発の標準化モジュールを組み合わせた柔軟で拡張性の高いシステムです。モジュールの組み合わせや配置は自由に設定可能で、スライド移動するロボットが複数のモジュールを連携制御します。
バラ取り作業の自動化
事例 / バラ置きされたラジエータの異品検査
高速・高剛性のVMBシリーズでラジエータの高速ハンドリングを実施。VMBシリーズは、フルカバー構造・充実の機内配線で、悪環境での導入も可能。AI ビジョンである Mech-Eyeで、ラジエータのバラ取りと異品検査を実施。ディープラーニング技術活用で認識精度を向上させ、安定稼働を実現します。

透明ワークの高速ピック&プレース
事例 / 高速搬送ラインでの透明ボトルのピッキング
AI搭載のCambrianビジョンシステムの物体認識技術とスカラロボットHSRの高速動作を組み合わせ、透明ワークの高速コンベアトラッキングを実現します。

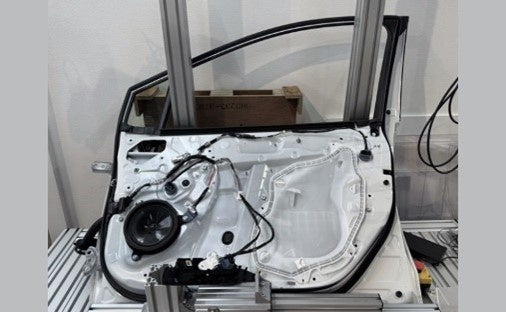
ハーネス配索作業の自動化
事例 / 自動車ドアハーネスの配索・コネクタ挿入
AI搭載のCambrianビジョンシステムにより、従来3Dビジョンでは困難だったハーネス(軟体物)の組付け作業の自動化を実現します。
力制御の立上げ工数を削減
事例 / ベアリングへのシャフト挿入
力センサ有 ロバスト コンプライアンス機能を紹介します。従来は力制御に複数のパラメータ調整が必要となり、その工数が課題でした。この機能では、設定項目と調整レベル段階の大幅な削減により、力制御の設定の簡単化を実現し、力制御の立上げ工数を大幅に削減できます。

ロボット保全情報の簡単見える化
事例 / ロボットの保全業務
IoT Data Shareを活用することで、ロボットの稼働情報を収集。収集したデータを可視化することで、適切なメンテナンスタイミング察知に貢献するIoTソリューションをご紹介します。

Pythonでプログラミング
事例 / お絵描きCOBOTTA
人が描いた絵をCOBOTTAが再現するデモンストレーションです。このデモはロボット専用言語ではなく、AI、Web、データ分析など幅広い分野で使われるプログラミング言語のPythonで制御しています。オープンプラットフォームなデンソーロボットの可能性をご覧ください。

現場に強く、即使える多機能携帯端末
製品 / Xnavis
現場のDX化をスマートに支える次世代デバイスを紹介します。現場での使いやすさを追求した、軽量 約180gのDX支援パーソナルデバイスをぜひお試しください。

(注) ニュースリリースに記載されている内容は報道発表日時点の情報です。その後、予告なしに変更する可能性があります。あらかじめご了承ください。
すべての画像
- 種類
- イベント
- ビジネスカテゴリ
- 電子部品・半導体・電気機器
- ダウンロード