ボッシュ、市街地の自動運転において車両とインフラを連携
MEC-View研究プロジェクトで得られた知見を発表
▶ ボッシュはMEC-Viewプロジェクトのコンソーシアムリーダーとして、パートナーのメルセデス・ベンツ、ノキア、オスラム、TomTom、IT Designersおよびデュースブルク=エッセン大学、ウルム大学と協力
▶ インフラのセンサーをネットワーク化することで自動運転をより安全かつ効率的なものに
▶ 街灯に組み込まれたセンサーで見えにくい障害物をいち早く検知
▶ 交通安全の強化および交通の流れを改善
▶ ウルム市において実際の走行条件下で新技術を実証中
▶ インフラのセンサーをネットワーク化することで自動運転をより安全かつ効率的なものに
▶ 街灯に組み込まれたセンサーで見えにくい障害物をいち早く検知
▶ 交通安全の強化および交通の流れを改善
▶ ウルム市において実際の走行条件下で新技術を実証中
虫の視線に勝る鳥の視線
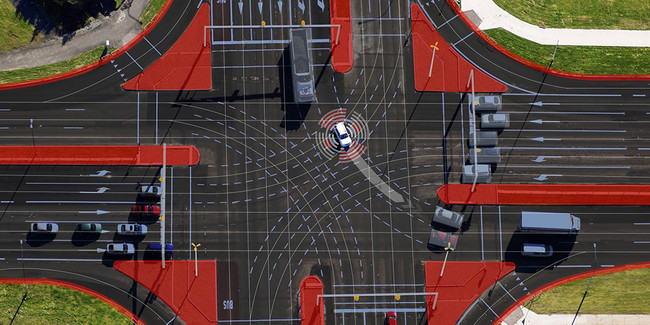
街灯の高さは最高で路上から6メートルにもなります。したがって交通量の多い交差点を上空から鳥のように正確に見通すことが可能で、このような情報は自動運転車両にとって将来必要なものとなるでしょう。カメラ、レーダー、LiDARセンサーなどで構成される車載センサーシステムは360°の正確な視界を提供します。これには地面からの視界と車両からの視界がありますが、トラックに遮られる歩行者、物陰から現れる乗用車、背後から接近して急な車線変更を試みる自転車などを認識するには必ずしも十分とは言えません。「車両には曲がり角や壁の向こうを見通す能力はないため、街灯にセンサーを組み込むことで車載センサーの視野を拡大することにしました」と、コンソーシアムリーダーであるボッシュでMEC-Viewプロジェクトを率いるRüdiger Walter Hennは述べています。プロジェクトパートナーが、この目的に対応するハードウェアおよびソフトウェアを開発しました。このシステムでインフラのセンサーから取得した画像と信号を処理し、高解像度デジタルマップ(HDマップ)と組み合わせて無線で車両に伝送します。さらに伝送されたこのデータを車載センサーの情報と統合し、関連するすべての道路利用者を含む精度の高い周辺画像を生成します。
データの無線伝送
最先端のモバイル通信技術は、センサー情報の超低遅延伝送が可能です。MEC-Viewプロジェクトでは、これを目的として設定を最適化した新しい5G通信規格のLTEモバイル通信技術を採用し、リアルタイムのデータ伝送を基本としました。遅延時間を最適化したモバイル通信の主な目的は、無線を介した事実上瞬時のデータ伝送だけではなく、そのデータの処理をできる限りソースに近づけることでもあります。この目的を達成するのが、モバイルエッジコンピューティングサーバー(略称はMECサーバー)として知られる特殊なコンピュータで、移動通信網に直接組み込まれます。このサーバーが、街灯のセンサーのデータと車両のサラウンドセンサーのデータ、そして極めて高精度なデジタルマップを統合します。このようにして現在の交通状況に関して可能な限りの情報を含む周囲状況のモデルを生成し、無線を介してそれを各車両で利用できるようにします。将来的に都市交通管制センターなどの施設にこのようなサーバーを導入すれば、メーカーに関係なくすべての車両、さらにはほかの道路利用者ともデータを共有できるようになります。
交通とのシームレスな統合
ウルム市では、2018年から、実際の交通状況でプロジェクトパートナーによる自動運転のテスト車両とインフラのセンサー間のデータ送信のテストが行われています。レーア地区に非常に見通しが悪いことで知られる交差点があります。ここに設置されている街灯にセンサーを組み込み、交差点での自動運転車両の運転を支援する試みが行われました。側道から運転の難しいこの交差点に近づいた車両は本道に合流する必要があります。このような場合に、新しく開発された技術により、自動運転のテスト車両がいち早く道路利用者を認識し、状況に応じて適切な走行モードに切り替えられるようになりました。そのため、本道の交通の流れを見定めて停車せずにスムーズに本道に合流することができます。このような技術の開発は、都市交通の安全性を高め、道路交通を円滑化します。プロジェクト期間中、ウルム市に構築されたインフラは引き続き利用され、今後の研究プロジェクトにも活用される予定です。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像