量子コンピューターによるロボットの姿勢制御手法を開発
芝浦工大・早大・富士通、量子技術でロボットの姿勢制御を高精度化
芝浦工業大学(東京都江東区/学長 山田 純)システム理工学部の大谷 拓也准教授(人間ロボットシステム研究室)、早稲田大学(東京都新宿区/総長 田中 愛治)理工学術院の高西 淳夫教授と富士通株式会社(神奈川県川崎市/代表取締役社長 時田 隆仁)は、量子コンピューターを活用してロボットの姿勢を効率的に制御する新手法を開発しました。
具体的には、複数の関節を持つロボットの「逆運動学計算」(目標位置に到達するための関節角度の計算)を、量子技術を活用して効率的かつ高精度に解くことに成功しました。理化学研究所と富士通が共同開発した64量子ビットの実機検証で、その有効性を確認しました。
ロボットの各部(リンク)の向きや位置を量子ビットで表現し、親関節の動きが子関節に影響する構造を量子もつれで再現することで、従来の古典的手法と比べて必要な計算回数を大幅に削減できました。量子コンピューターの実用化が進めば、リアルタイム制御や複雑な動作が求められる次世代ロボット開発への貢献が期待できます。
ポイント
-
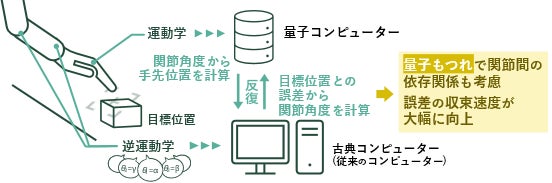
ロボットの関節の動きを量子ビットで表現し、量子回路を使って順運動学を計算
-
量子もつれの導入で関節間の連動性を再現し、計算速度と精度を向上
-
富士通の量子シミュレーターでの検証で、従来手法よりも高い精度と実用性を確認。また64量子ビットの超伝導量子コンピューター(以下、64量子ビットの実機)でも量子もつれ導入の効果を確認
複雑化するロボットの姿勢計算、量子技術で突破口
ロボットの姿勢制御では、目標とする手先の位置から関節の角度を求める「逆運動学計算」が重要になります。特に、複数の関節を持つロボットでは関節の組み合わせが膨大となり、目標位置との誤差を最小化するために反復計算が必要になります。その結果、計算負荷が高くなり、人体の関節数と同じ17個の関節を有する全身多関節のモデルの場合は、解空間が膨大なため解けず、近似した7個の関節で運動計算を行うのが一般的でしたが、動きの滑らかさに限界がありました。
本研究では、こうした課題に対して、量子コンピューターの特性を活かした新しい手法を提案しました。ロボットの各部品(リンク)の向きや位置を量子ビットで表現し、量子回路を用いて順運動学計算(関節角度から手先位置を求める計算)を実行しています。逆運動学計算は古典的なコンピューターで行い、量子と古典のハイブリッド手法によって、効率的な姿勢制御を実現しました。
量子もつれの導入で、収束速度と精度が向上
さらに、量子もつれを導入することで、親関節の動きが子関節に自然に影響を与える構造を量子回路上で再現しました。これにより、逆運動学計算の収束速度と精度が大幅に向上しました。富士通の量子シミュレーターを用いた検証では、従来手法と比較して、少ない計算回数でも最大43%の誤差低減を達成しました。また、64量子ビットの実機を用いた実験においても、量子もつれ導入による効果を確認しています。さらに、ロボットなどの17個の関節を持つ全身多関節モデルの運動計算を、30分程度で実行できるという試算が得られました。
ヒューマノイドや多関節ロボットへの応用に期待
この手法は、少数の量子ビットで多関節ロボットの姿勢を表現できるため、現在の開発段階の量子コンピューター(NISQ)環境でも実装可能です。将来的には、ヒューマノイドロボットや多関節マニピュレータのリアルタイム制御、障害物回避、エネルギー最適化などへの応用が期待できます。また、量子フーリエ変換などの高度な量子アルゴリズムとの組み合わせにより、さらなる性能向上も見込めます。
論文情報
著者:大谷 拓也(芝浦工業大学 システム理工学部)、高西 淳夫(早稲田大学 創造理工学部)、原 伸之(富士通株式会社)、瀧田 裕(同)、木村 浩一(同)
タイトル:「Quantum computation for robot posture optimization」
掲載誌:「Scientific Reports」Nature Portfolio社
DOI:10.1038/s41598-025-12109-0
商標について
記載されている製品名などの固有名詞は、各社の商標または登録商標です。
補足:掲載先メディアや閲覧環境の仕様によっては、「隆」の文字が正しく表示されない場合があります。正しくは、「隆」の「生」の上に「一」が入ります。
芝浦工業大学とは
工学部/システム理工学部/デザイン工学部/建築学部/大学院理工学研究科
理工系大学として日本屈指の学生海外派遣数を誇るグローバル教育と、多くの学生が参画する産学連携の研究活動が特長の大学です。東京都(豊洲)と埼玉県(大宮)に2つのキャンパス、4学部1研究科を有し、約9,500人の学生と約300人の専任教員が所属。2024年には工学部が学科制から課程制に移行。2025年にデザイン工学部、2026年にはシステム理工学部で教育体制を再編し、新しい理工学教育のあり方を追求していきます。創立100周年を迎える2027年にはアジア工科系大学トップ10を目指し、教育・研究・社会貢献に取り組んでいます。
早稲田大学とは
早稲田大学は1882年、「学問の独立」「学問の活用」「模範国民の造就」を建学の理念として設立された、10の学術院のもとに学部・大学研究科・専門職大学院を有する総合大学です。来る2032年に創立150周年を迎える早稲田大学は、原点である建学の精神に立ち返り、研究・教育・貢献の3つの柱のさらな強化に取り組んでいます。さらには、2050年のあるべき姿として、「一身一家一国の為のみならず、進んで世界に貢献する抱負がなければならぬ」の理念のもと、「世界人類に貢献する大学」への進化を目指しています。
富士通株式会社とは
富士通のパーパスは、イノベーションによって社会に信頼をもたらし、世界をより持続可能にしていくことです。世界中のお客様に選ばれるデジタル・トランスフォーメーション(DX)パートナーとして、約11万3,000人の富士通グループ社員が、世界が直面する様々な課題の解決に取り組んでいます。富士通が注力する5つの重点技術領域である、AI、コンピューティング、ネットワーク、データ&セキュリティ、およびコンバージングテクノロジーを駆使した幅広いサービスとソリューションを組み合わせ、サステナビリティ・トランスフォーメーション(SX)を実現します。
富士通 (東証:6702) の2025年3月期の連結売上高は3兆6,000億円 (230億米ドル) で、国内ITサービス市場におけるベンダー売上でトップシェアを維持しています。詳しくは、富士通の公式ウェブサイトをご覧ください。
global.fujitsu
本件に関するお問い合わせ
富士通株式会社
お問い合わせフォーム
当社はセキュリティ保護の観点からSSL技術を使用しております。
プレスリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがあります。あらかじめご了承ください。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像