常陸太田市における実証実験にて安心・安全な自動運転サービスの実現に向けた検知システムの検証を行います
株式会社みちのりホールディングス(本社:東京都千代田区、代表取締役グループCEO:松本順、以下「みちのりHD」)および茨城交通株式会社(本社:茨城県水戸市、代表取締役社長:任田正史、以下「茨城交通」)、パイオニア株式会社(本社:東京都文京区、代表取締役 兼 社長執行役員:森谷浩一、以下「パイオニア」)は、道の駅「ひたちおおた」を拠点とした自動運転サービス実証実験地域協議会(実験事務局:日本工営株式会社/本社:東京都千代田区、代表取締役社長:有元龍一)が実施する常陸太田市における自動運転サービス実証実験に参加し、安心・安全な自動運転サービスの実現に向けた検知システムの検証を行います。
本実証実験は、自動運転車両および地域住民をサポートする移動サービスの実現に向けた技術の検証を目的とするもので、パイオニアが保有する“「3D-LiDARセンサー」による人・物体検知”、“独自の音響信号処理技術を用いた音声案内システム”、“自動運転に有用な各種情報を取得するIoTシステム”を用いた検証を行います。
【常陸太田市自動運転サービス実証実験の概要】
本実証実験は、内閣府 戦略的イノベーション創造プログラム(SIP)のプロジェクトの1つとして実施されます。
実施期間 :2019年6月23日~7月21日
実施場所 :茨城県常陸太田市 高倉地域 (走行距離約1.8km)
実施時間 :8:00~17:00(毎日運行)
走行車両 :ヤマハ発動機株式会社が提供する自動運転車両
参画企業 :日本工営株式会社、株式会社みちのりホールディングス、茨城交通株式会社、
ジョルダン株式会社、株式会社KDDI総合研究所、パイオニア株式会社
パイオニアとみちのりHD、茨城交通は、パイオニアの技術を利活用し、以下の検証を行います。
■路側・車両に設置した「3D-LiDARセンサー」による人・物体検知
パイオニアは、これまで車両や船舶に「3D-LiDARセンサー」を設置した実験および実用性の検証を重ねてきましたが、今回の実証では、検証車両への搭載に加え、「3D-LiDARセンサー」を路側へ設置して走行ルート上の障害物を検知する検証を行います。物体を高解像度で立体的に検知できる「3D-LiDARセンサー」は、夜間でも物体検知が可能なため、車両、路側(インフラ)の双方から自動運転サービスを支えるセンサーとしての活用が期待されています。
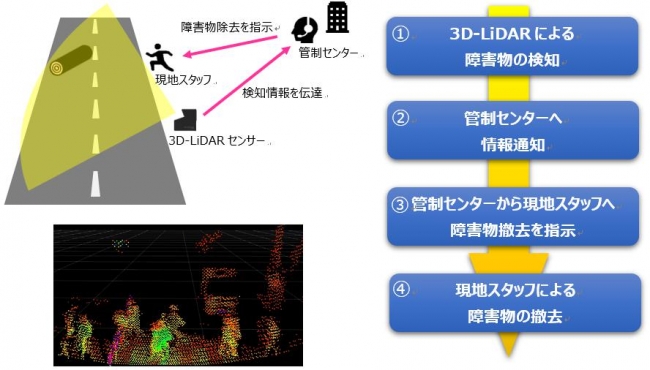
① 路側からの障害物検知
路側へ「3D-LiDARセンサー」を設置し、検証車両の走行ルート上の樹木などの落下物、その他障害物を検知し、その情報を管制センターへ伝える技術の検証を行います。障害物を検知して除去するまでの一連の処理を実運用に近い状況で検証し、インフラ側からサービスを支えるための課題抽出を行います。
<路側からの障害物検知(イメージ)>
② 車両からの乗車希望者検知
走行車両へ「3D-LiDARセンサー」を設置し、乗車を希望される方を検知して自動運転車両へ情報伝達する技術の検証を行います。運転手が介在しない自動運転バスにおいて、これまで人が行っていた乗車希望者の認知を「3D-LiDARセンサー」に置き換えたシーンを想定しており、乗車希望者の検知から乗車までを実運用に近い状況で検証することにより、自動運転バスへの「3D-LiDARセンサー」の実装に向けた課題の整理と解決策の検討につなげます。
<3D-LiDARセンサーを用いた乗車希望者検知イメージ>
■音響信号処理技術を用いた音声案内システム
対象物を振動させてスピーカーのように音を出せる音響デバイスと、環境に合わせて聞き取りやすい音に自動で調整するパイオニア独自の音響信号処理技術を用いた音声案内システム。バス停や自動運転車両などの既存設備へ外観を損なうことなく後付け可能なシステムで、自動運転車両でのアナウンスやバス停での音声案内などへの活用を想定しています。
<音声案内システムの構成要素>
■自動運転に有用な各種情報を取得するIoTシステム
加速度や車両に取り付けたマイクで収集した音など、自動運転に有用とされる各種センシング情報を、ネットワーク経由で取得するパイオニアのIoTシステム。自動運転サービスの管理者が走行環境などの状況を把握する用途への活用を想定しています。
※本実証実験での、自動運転車両の走行環境および車内状況の撮影・解析は、技術研究・開発を目的としたものであり、通行中・乗車中の方を特定するものではありません。また、取得した画像データは前記の技術研究・開発のためにのみ、各々のグループ会社内において使用し、これに必要な範囲を超えて第三者への開示・提供は行いません。
本実証実験は、自動運転車両および地域住民をサポートする移動サービスの実現に向けた技術の検証を目的とするもので、パイオニアが保有する“「3D-LiDARセンサー」による人・物体検知”、“独自の音響信号処理技術を用いた音声案内システム”、“自動運転に有用な各種情報を取得するIoTシステム”を用いた検証を行います。
【常陸太田市自動運転サービス実証実験の概要】
本実証実験は、内閣府 戦略的イノベーション創造プログラム(SIP)のプロジェクトの1つとして実施されます。
実施期間 :2019年6月23日~7月21日
実施場所 :茨城県常陸太田市 高倉地域 (走行距離約1.8km)
実施時間 :8:00~17:00(毎日運行)
走行車両 :ヤマハ発動機株式会社が提供する自動運転車両
参画企業 :日本工営株式会社、株式会社みちのりホールディングス、茨城交通株式会社、
ジョルダン株式会社、株式会社KDDI総合研究所、パイオニア株式会社
パイオニアとみちのりHD、茨城交通は、パイオニアの技術を利活用し、以下の検証を行います。
■路側・車両に設置した「3D-LiDARセンサー」による人・物体検知
パイオニアは、これまで車両や船舶に「3D-LiDARセンサー」を設置した実験および実用性の検証を重ねてきましたが、今回の実証では、検証車両への搭載に加え、「3D-LiDARセンサー」を路側へ設置して走行ルート上の障害物を検知する検証を行います。物体を高解像度で立体的に検知できる「3D-LiDARセンサー」は、夜間でも物体検知が可能なため、車両、路側(インフラ)の双方から自動運転サービスを支えるセンサーとしての活用が期待されています。
① 路側からの障害物検知
路側へ「3D-LiDARセンサー」を設置し、検証車両の走行ルート上の樹木などの落下物、その他障害物を検知し、その情報を管制センターへ伝える技術の検証を行います。障害物を検知して除去するまでの一連の処理を実運用に近い状況で検証し、インフラ側からサービスを支えるための課題抽出を行います。
<路側からの障害物検知(イメージ)>
② 車両からの乗車希望者検知
走行車両へ「3D-LiDARセンサー」を設置し、乗車を希望される方を検知して自動運転車両へ情報伝達する技術の検証を行います。運転手が介在しない自動運転バスにおいて、これまで人が行っていた乗車希望者の認知を「3D-LiDARセンサー」に置き換えたシーンを想定しており、乗車希望者の検知から乗車までを実運用に近い状況で検証することにより、自動運転バスへの「3D-LiDARセンサー」の実装に向けた課題の整理と解決策の検討につなげます。
<3D-LiDARセンサーを用いた乗車希望者検知イメージ>

■音響信号処理技術を用いた音声案内システム
対象物を振動させてスピーカーのように音を出せる音響デバイスと、環境に合わせて聞き取りやすい音に自動で調整するパイオニア独自の音響信号処理技術を用いた音声案内システム。バス停や自動運転車両などの既存設備へ外観を損なうことなく後付け可能なシステムで、自動運転車両でのアナウンスやバス停での音声案内などへの活用を想定しています。
<音声案内システムの構成要素>

■自動運転に有用な各種情報を取得するIoTシステム
加速度や車両に取り付けたマイクで収集した音など、自動運転に有用とされる各種センシング情報を、ネットワーク経由で取得するパイオニアのIoTシステム。自動運転サービスの管理者が走行環境などの状況を把握する用途への活用を想定しています。

※本実証実験での、自動運転車両の走行環境および車内状況の撮影・解析は、技術研究・開発を目的としたものであり、通行中・乗車中の方を特定するものではありません。また、取得した画像データは前記の技術研究・開発のためにのみ、各々のグループ会社内において使用し、これに必要な範囲を超えて第三者への開示・提供は行いません。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
