一般路線バスひたちBRTで自動運転バスの実証実験
~路側センサーや遠隔監視装置を活用した実証で2022年以降の本格実装を目指す~
茨城交通株式会社(本社:茨城県水戸市、代表取締役社長:任田 正史、以下 茨城交通)、株式会社みちのりホールディングス(本社:東京都千代田区、代表取締役グループCEO:松本 順、以下 みちのりHD)、日立市、茨城県、住友電気工業株式会社(本社:大阪市中央区、社長:井上 治、以下 住友電工)、パイオニア株式会社の100%子会社であるパイオニアスマートセンシングイノベーションズ株式会社(本社:東京都文京区、社長:高木 晴彦、以下 PSSI)、株式会社小糸製作所(本社:東京都港区、代表取締役社長:三原 弘志、以下 小糸製作所)、コイト電工株式会社(本社:静岡県駿東郡長泉町、代表取締役社長:廣瀬 仁士、以下 コイト電工)、KDDI株式会社(本社:東京都千代田区、代表取締役社長:髙橋 誠、以下 KDDI)、株式会社KDDI総合研究所(本社:埼玉県ふじみ野市、代表取締役所長:中村 元、以下 KDDI総合研究所)は、2020年10月上旬から21年3月上旬(実証実験準備期間を含む)のうち13週間で中型バスを用いた自動運転走行実証実験を予定しています。本事業は、経済産業省・国土交通省の事業※[1]を受託した国立研究開発法人産業技術総合研究所より2019年度に「中型自動運転バスによる実証実験」を実施するバス運行事業者に選定され、実施するものです。今回は、2018年に2週間実施した「ラストマイル自動走行の実証評価(日立市)※[2]」に続く二回目の走行実証実験であり、自動運転車両と通信を行う路側センサーと遠隔監視装置の検証を行います。
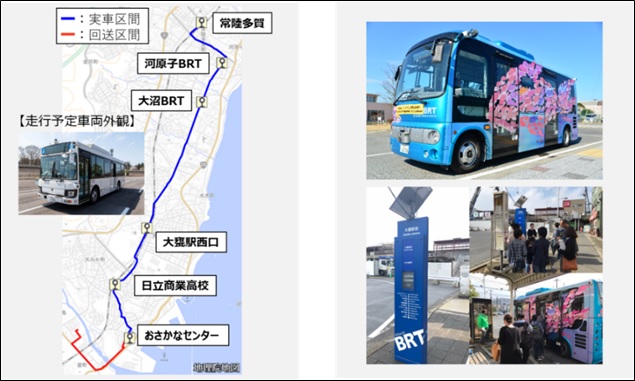
ひたちBRT※[3]は2019年3月に第二期の延伸工事を完了し、道の駅日立おさかなセンターとJR常磐線常陸多賀駅の間を結ぶ専用道区間(約6km)を含む路線長が約9kmの路線になっており、年間約53万人が利用しています。本年度実証実験では、前回の約3.2kmから大幅に延伸した新たな路線にて、通常の路線バスのダイヤに追加して自動運転バスのダイヤを設定し運行します。一般の利用者が広く利用する環境を作ることで、特別な移動手段ではなく通常の移動手段としてより多くの利用者に乗車してもらい、2022年以降の本格的な商用運行に向けた課題抽出を進めることを目指します。
[1] 高度な自動走行・MaaS等の社会実装に向けた研究開発・実証事業:専用空間における自動走行などを活用した端末交通システムの社会実装に向けた実証
[2] 本事業の詳細については以下をご確認ください。https://www.aist.go.jp/aist_j/news/au20180827.html
[3] Bus Rapid Transitの略。日立電鉄の跡地をバス専用線として利用。
●実証実験のポイント
本格商用実装に向けた取組として、高い安全性と多様な環境下で安定した運行を実現するため、次の2点の技術を導入します。
① 路側センサーによる自動運転車両との協調
専用道区間や一般道区間において、自動運転車両から見通しの悪い場所に、各種光学センサーや電波センサーを活用した路側センサーを敷設し、自動運転車両と通信することで、自動運転車両の死角を減らします。これら路側センサーと前回実証にて検証した信号協調システムが連携することで、自動運転バスが安全に走行できる走行環境の構築とスムーズな定時走行を目指します。これら路側センサーの設置は、住友電工、PSSI、小糸製作所、コイト電工の協力のもと実施します※。
※ PSSIは、自社で開発し、2020年秋に発売予定の3D-LiDARを使用します。
② 遠隔監視装置
上記路側センサーや信号協調システムとの連携を含めた自動運転バスの円滑な運行を支援するためKDDI、KDDI総合研究所から遠隔監視装置と遠隔に情報を送信するための通信環境を提供します。遠隔監視装置では、自動運転バスの走行状況をカメラ映像や各種状態情報で確認することに加えて、車外に設置する路側センサーの稼働状態もモニタリングすることで、将来、自動運転バスが運行する際の運行管理の在り方についても検証を進めます。
なお、本年度の本格実証開始に向けた準備状況等は、みちのりグループで取り組む自動運転プロジェクトのWEBサイト(http://autonomousbus-project.com/ )にて適宜更新していきます。
ひたちBRT※[3]は2019年3月に第二期の延伸工事を完了し、道の駅日立おさかなセンターとJR常磐線常陸多賀駅の間を結ぶ専用道区間(約6km)を含む路線長が約9kmの路線になっており、年間約53万人が利用しています。本年度実証実験では、前回の約3.2kmから大幅に延伸した新たな路線にて、通常の路線バスのダイヤに追加して自動運転バスのダイヤを設定し運行します。一般の利用者が広く利用する環境を作ることで、特別な移動手段ではなく通常の移動手段としてより多くの利用者に乗車してもらい、2022年以降の本格的な商用運行に向けた課題抽出を進めることを目指します。
[1] 高度な自動走行・MaaS等の社会実装に向けた研究開発・実証事業:専用空間における自動走行などを活用した端末交通システムの社会実装に向けた実証
[2] 本事業の詳細については以下をご確認ください。https://www.aist.go.jp/aist_j/news/au20180827.html
[3] Bus Rapid Transitの略。日立電鉄の跡地をバス専用線として利用。
●実証実験のポイント
本格商用実装に向けた取組として、高い安全性と多様な環境下で安定した運行を実現するため、次の2点の技術を導入します。
① 路側センサーによる自動運転車両との協調
専用道区間や一般道区間において、自動運転車両から見通しの悪い場所に、各種光学センサーや電波センサーを活用した路側センサーを敷設し、自動運転車両と通信することで、自動運転車両の死角を減らします。これら路側センサーと前回実証にて検証した信号協調システムが連携することで、自動運転バスが安全に走行できる走行環境の構築とスムーズな定時走行を目指します。これら路側センサーの設置は、住友電工、PSSI、小糸製作所、コイト電工の協力のもと実施します※。
※ PSSIは、自社で開発し、2020年秋に発売予定の3D-LiDARを使用します。
② 遠隔監視装置
上記路側センサーや信号協調システムとの連携を含めた自動運転バスの円滑な運行を支援するためKDDI、KDDI総合研究所から遠隔監視装置と遠隔に情報を送信するための通信環境を提供します。遠隔監視装置では、自動運転バスの走行状況をカメラ映像や各種状態情報で確認することに加えて、車外に設置する路側センサーの稼働状態もモニタリングすることで、将来、自動運転バスが運行する際の運行管理の在り方についても検証を進めます。
なお、本年度の本格実証開始に向けた準備状況等は、みちのりグループで取り組む自動運転プロジェクトのWEBサイト(http://autonomousbus-project.com/ )にて適宜更新していきます。

このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- イベント
- ビジネスカテゴリ
- 交通・運送・引越し政治・官公庁・地方自治体
- ダウンロード
