リアルワールド(RLWRLD)、日本初※の独自ロボティクス基盤モデル「RLDX-1(リアルデックス)」を正式公開
〜力・触覚・記憶を統合し、グローバルベンチマークで最高水準を達成したフィジカルAI技術を実現〜
世界最先端のフィジカルAI基盤モデル開発を実現するリアルワールド株式会社(RLWRLD、本社:アメリカ 代表:リュ・ジュンヒ/日本法人:東京都千代田区 代表:李勲)は2026年5月7日、独自のロボティクス基盤モデル(Robotics Foundation Model、以下 RFM)「RLDX-1(リアルデックス)」を正式に公開しました。本モデルは、視覚・言語に加え、力や触覚、作業記憶までを単一モデルで処理する「Dexterity-First」設計を採用。従来の視覚・言語中心のVLA(Vision-Language-Action)モデルとは異なる技術により、高い性能を実現しています。
※ 2026年5月12日時点、日本国内に法人を有する企業が、 事前学習からロボティクス基盤モデル(RFM)を独自開発し、 商用提供を開始し初めた企業として(リアルワールド社調べ)

■器用さを起点とした新たな設計思想「Dexterity-First」
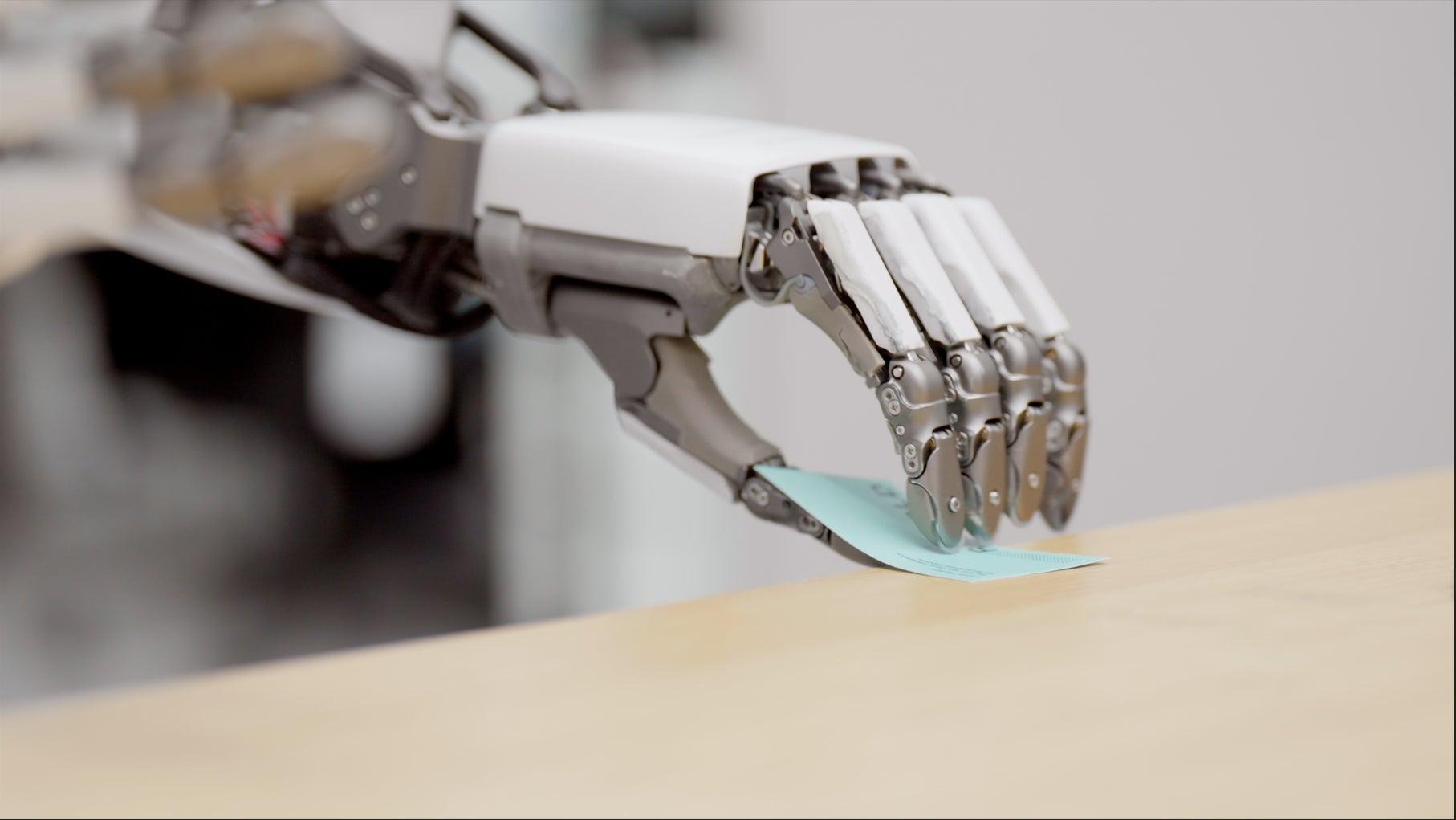
業界では一般に、「知能が先に実現すれば、器用さは自然と備わる」と考えられてきました。しかし、リアルワールド(RLWRLD)はこれとは異なる考え方を提示しています。RLDX-1が提示するのは、「器用さは知能の結果として後から付随するものではなく、知能が物理世界で行動する際に不可欠なプロセスそのものである」という考え方です。力(トルク)や触覚、接触タイミングといった、視覚だけでは捉えられない信号を扱うことができてこそ、産業現場における精密な作業の自動化が実現できるという問題意識に基づいています。
この考えを実証するため、リアルワールド(RLWRLD)は産業現場で繰り返し発生する手作業の課題に着目し、自社ベンチマーク「DexBench」を通じて体系的に定義しました。具体的には、①把持の多様性(Grasp Diversity)、②空間精度(Spatial Precision)、③時間精度(Temporal Precision)、④接触精度(Contact Precision)、⑤文脈認識(Context Awareness)の5つの観点から、手の操作能力を定量的に評価する仕組みを構築しています。
■ グローバルベンチマークで高い性能を確認し、実機環境でも優位性を実証
RLDX-1は、グローバル公開ベンチマーク8種において、NVIDIA社のGR00TやPhysical Intelligence社のπO(パイゼロ)など、既存の最高性能(State-of-the-Art、SOTA)モデルを上回る結果を記録しました。長期かつ接触中心のタスクとして設計された「RoboCasa Kitchen」では70.6点を記録し、70点台に到達したVLAモデルとして高い水準を示しています。ヒューマノイド専用評価「GR-1 Tabletop」では58.7点を獲得し、次点モデルに対して10.7ポイントの差をつけました。さらに、カメラ・照明・言語・背景など7つの変数に対するロバスト性を評価する「LIBERO-Plus」でも86.7%を記録し、比較対象モデルを上回る結果となりました。
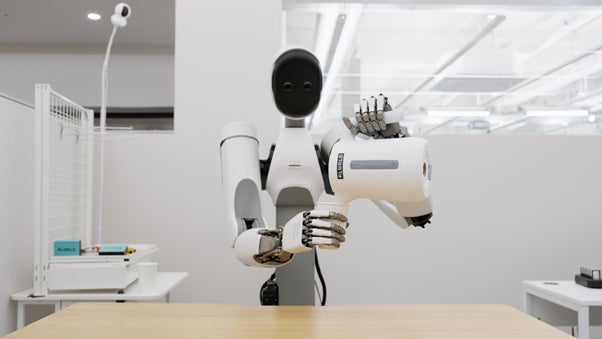
また、実機ロボット環境においては、さらに顕著な差が確認されています。リアルワールド(RLWRLD)が開発に参画したWiRobotics社のヒューマノイド「ALLEX」を用いた評価では、動的な重量変化を伴う「コーヒー注ぎ(Pot-to-Cup Pouring)」課題において70.8%の成功率を記録しました。比較対象モデルが30%台後半にとどまったことを踏まえると、約2倍の成果となっています。
■ “見て、感じて、記憶し、適応する” コアアーキテクチャ「MSAT」 構造を採用
リアルワールド(RLWRLD)の技術的中核は、マルチストリーム・アクション・トランスフォーマー(Multi-Stream Action Transformer、MSAT)です。従来のVLA(Vision-Language-Action)モデルが、視覚・言語・行動・触覚・メモリといった異なる信号を単一ストリームで処理していたのに対し、MSATは各モダリティごとに独立したストリームを設け、モダリティ間のジョイントアテンション(joint attention)によって統合する構造を採用しています。さらに、力(トルク)や触覚といった視覚では捉えられない物理信号や長期記憶についても、専用モジュール(Physics Module、Memory Module)で処理することで、単一モデルが「見て(see)・感じて(feel)・記憶し(remember)・適応する(adapt)」一連のプロセスを実現しています。
リアルワールド(RLWRLD)CTOのペ・ジェギョンは、「各モダリティがそれぞれの特性を十分に発揮できるよう構造を分離した点が、RLDX-1の中核です。トルク信号によって接触の瞬間を高精度に捉え、時間軸上の動的変化を推論する能力は、従来のVLAでは構造的に扱いが難しい領域でした」と述べています。
■日韓主要企業とのデータパイプラインを構築し、産業適用を前提とした設計を実現
RLDX-1のもう一つの特長は、開発当初から産業現場で実際に求められる作業を高い精度で遂行できるよう設計されている点です。リアルワールド(RLWRLD)は、数十社にのぼる産業パートナーとの協業を通じて、製造・物流現場の作業を直接観察・分析し、その知見を反映した自社ベンチマーク「DexBench」をRLDX-1と同時に公開しました。DexBenchは、現場ニーズを起点とした手作業タスクを定量化した評価体系であり、リアルワールド(RLWRLD)は本ベンチマークをデクステリティ分野における産業標準として確立することを目指しています。
また同社は、SKテレコム、LG電子、CJ大韓通運、ロッテ、KDDI、ANAホールディングス、三井化学、島津製作所など、日韓の主要企業から出資を受けています。さらに、10社以上の企業とベンチマークの共同開発やPoC(概念実証)、RX(Robotics Transformation)プロジェクトを推進しています。今後も産業パートナーとの連携およびデータパートナーシップを強化し、持続的な競争優位の確立を図ってまいります。

■ 米国ローンチイベントで協業を発表し、RFMを中核としたエコシステム構築へ
2026年5月13日に米国で開催されるローンチイベント「Dexterity Night」には、韓国・米国・日本のヒューマノイドハードウェア企業が参加予定です。「ロボット産業における次の変曲点はなぜ“手”なのか」をテーマとしたパネルディスカッションも実施されます。
今回公開したRLDX-1は、事前学習チェックポイント(RLDX-1-PT)およびプラットフォーム別ミドトレーニングチェックポイント2種(RLDX-1-MT-ALLEX、RLDX-1-MT-DROID)の計3種(各8.1Bパラメータ)で構成されています。モデルの重み、学習コード、技術ドキュメントはGitHubおよびHugging Faceを通じて公開されており、外部研究者も活用可能です。また、WiRobotics社のヒューマノイド「ALLEX」、協働ロボットアーム「Franka Research 3」、オープンソースロボットプラットフォーム「OpenArm」など、異なるロボットにおいても、単一バックボーンで動作することを確認しており、特定のハードウェアに依存しないクロスエンボディメント構造を実証しています。
さらに、RLDX-1は、学習段階においてNVIDIAのIsaac GR00T、Isaac Lab、Isaac Sim、cuRoboを活用し、計算基盤にはH100/A100 GPUを採用しています。推論段階ではJetson AGX ThorやTensorRTなどを含むクラウドからエッジまでの環境での運用を想定しています。今後もNVIDIA、AWS、MicrosoftをはじめとするグローバルなAIインフラパートナーと連携し、研究開発および実証を推進していく予定です。
■ 手の操作を超えて——次世代「4D+ワールドモデル」へ
リアルワールド(RLWRLD)は、RLDX-1を起点として、次世代技術ビジョンである「4D+ワールドモデル(World Model)」の実現に取り組んでいきます。現在、多くのロボティクス基盤モデル企業が映像データを基盤としたビジョン型ワールドモデルの開発を進めていますが、リアルワールド(RLWRLD)はこのアプローチには本質的な限界があると考えています。接触トルクや触覚、ロボットの関節状態(robot state)といった、産業現場で求められる精密作業に不可欠な情報はカメラ映像だけでは取得できず、映像データを増やすだけでは十分に再現できないためです。
同社が提唱する「4D+ワールドモデル」は、こうした課題に対応するものです。視覚・言語・行動に加え、接触、トルク、ロボット状態といった物理情報を時間軸上で統合的に予測・生成し、従来の映像ベースモデルでは扱えなかった領域を直接シミュレートします。モデル名の「4D」は時間軸を含む三次元物理世界を、「+」はピクセルを超えた物理・接触・状態情報を意味しています。
リアルワールド(RLWRLD)代表のリュ・ジュンヒは、「ピクセルに収まらない情報は、どれだけ映像を集めても可視化することはできません。RLDX-1は、私たちの技術ロードマップにおける最初のマイルストーンに過ぎません。日韓の産業現場で蓄積したデータと技術を基盤に、グローバルのヒューマノイドパートナーとともに、4D+ワールドモデルの実現に向けた長期的な取り組みを進めていきます」と話しています。
リアルワールド(RLWRLD)は、今回の米国ローンチイベントを皮切りに、日本および韓国においても順次RLDX-1の発表イベントを開催する予定です。
【リアルワールド(RLWRLD)について】
リアルワールド(RLWRLD)は、人間レベルの手の操作能力と認知能力の実現を目指すロボティクス基盤モデルを開発するフィジカルAI企業です。2024年に設立され、日本・米国・韓国に拠点を展開しています。独自の4D+マルチモーダル産業データ基盤を活用し、産業環境において人型ロボットが人間のように知覚・理解・行動するための技術開発を推進しています。現在は日韓の主要企業とのパイロットプロジェクトを通じて商用化を進めており、産業用ロボットAI分野におけるグローバルリーダーを目指しています。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像