光学式触覚センサ(α版)を限定100個、販売開始
【大学発触覚センシング技術を開発するFingerVision】
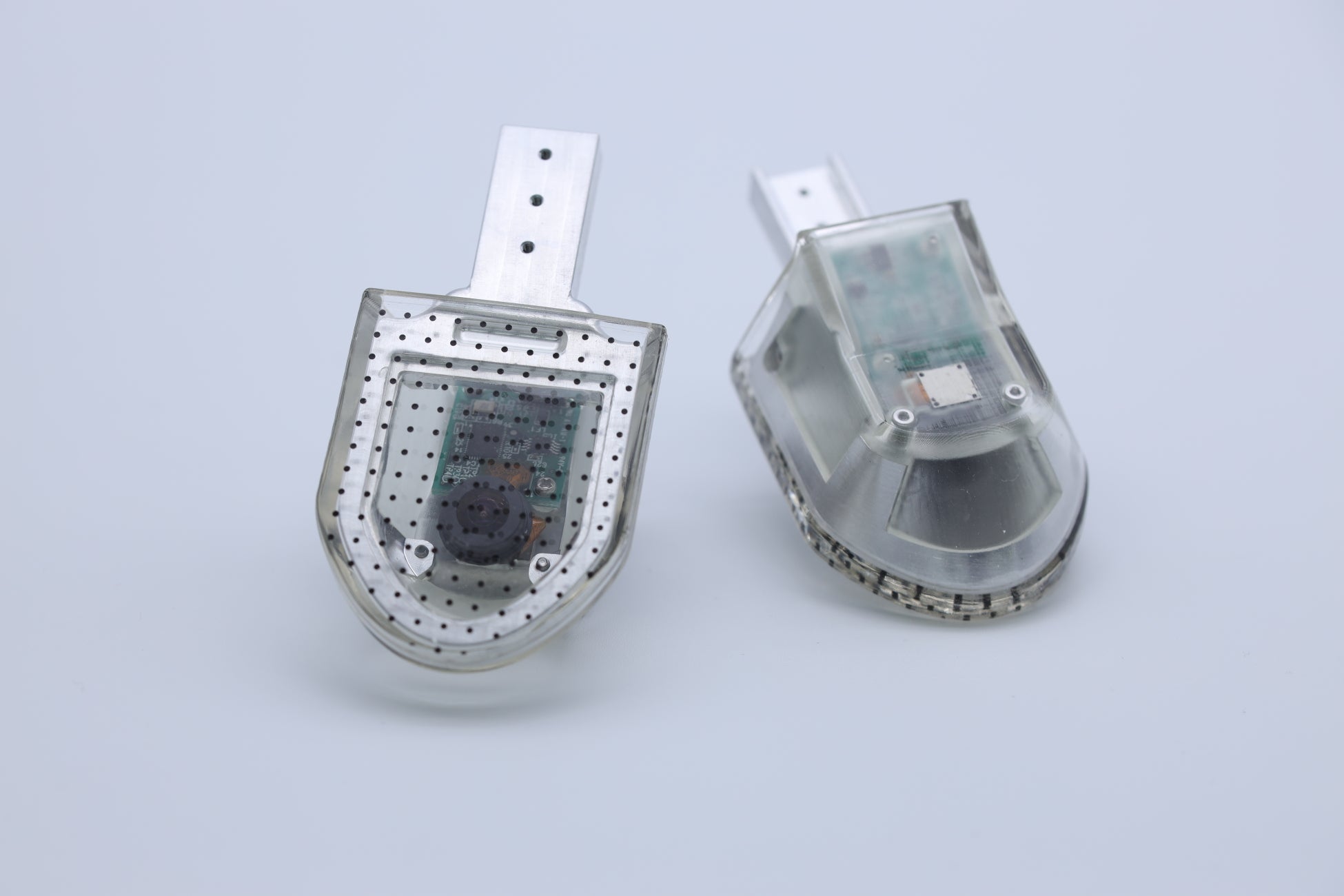
米・カーネギーメロン大学発の「視触覚」技術の実用化を通じて、ロボットや機械の適用範囲を広げ、様々な社会課題を解決することを目指す株式会社FingerVision(代表取締役:濃野友紀、以下FingerVision)は、光学式触覚センサ(α版)の販売を開始しました。触覚センサ単品での購入に加えて、グリッパや組込制御PCを含む評価キットのレンタル等、ニーズや用途に応じてご選択頂けます。
2022年10月12日
◆光学式触覚センサの特徴
高機能(マルチモダリティ・高解像度)かつ、高耐久でありながら、経済性に優れる実用性なセンサです。
①高機能
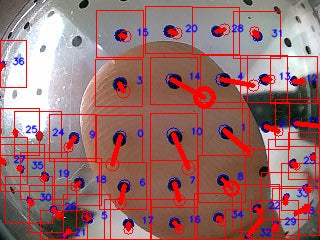
カメラで取得した画像情報から力分布(x, y, z方向)のみならず、滑り分布や対象物の重さ、把持位置・姿勢、形状、質感・テクスチャ、異物、温度などのモダリティを画像処理によって取得できます。これは、人のように直接触れることで取得できる、いわゆる「触覚情報」だけでなく、直接触れなくとも目で見て分かる「視覚に相当する情報」をも加えた複数のモダリティをロボット等の制御に活用できることを意味します。
さらに解像度の高いカメラを利用するため、他の種類の触覚センサと比べて、力分布や滑り分布が高解像度です。例えば、滑りの情報は、圧力の中心の滑りからワークの滑りを推定するという従来的なアプローチをとる必要がなく、滑りを直接観察できるため、ロボットの制御に必要な高精度な情報を取得することができます。
また、性能向上のドライバーがソフトウエア側にあるため、機動的な性能アップデートが可能となります(例:製品購入後/レンタル後に利用しながら最新機能がアップデートされる など)。
②高耐久性
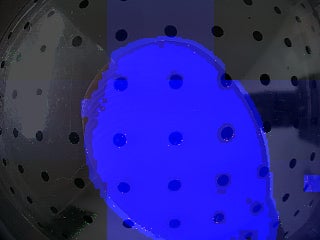
ワークとの接触面は透明なアクリル樹脂とシリコンゴムで構成されており、電子基板(カメラ)と外力は物理的に遮断されているため、原理的に高耐久です。皮膚の材料は安価な素材でできており、センサの表面が破損しても、脱着機構となっている表面だけを容易かつ安価に取り替えることが可能です。情報元がカメラ1つであり、複雑な配線も不要であるため利用後のメンテナンス性にも優れています。
③経済性に優れる
「画像(カメラ)に基づく」という特性上、センサを構成するハードウエアの機構が極めてシンプルであり、イニシャル・ランニングの両面で原価が低く経済性に優れます。
また、市販のロボットアームに装着できるため、安価なロボットアームを選定すれば、その分、安価に実利用できます (現状はROS対応のロボットが対象) 。
◆販売ラインナップ
α版という位置づけで、特定の業界やタスク向けに特化された仕様ではなく、汎用的なアプリケーションとして3種類の販売形態([A]~[C])の中から選択できます。物体操作における代表的な触覚モダリティである「力分布」及び「滑り分布」の情報を取得できます。
[A]触覚センサユニット
グリッパに装着するセンサユニットおよび画像処理プログラムが対象になります。
[B]グリッパセット
センサユニットに加えて、ロボットアーム(ROS対応)への装着・把持制御に必要なグリッパや組込制御PCを含むセットとなります。画像処理プログラムや関連ライブラリはインストール済であるため、購入後すぐにロボットアームを活用した把持制御に利用可能です。
[C]評価キット(グリッパセットのレンタル)
グリッパセットに加えて、アプリケーション開発(用途開発)に関わる技術相談、不具合時の交換サポート、消耗品の補填等が含まれるパッケージを1か月単位でのレンタルとしてご利用頂けます。「まずは1度試用してみたい」というニーズをお持ちのユーザ様には、始めやすいサービスとなっています。
[A]~[C]の販売形態問わず、本日より、限定100個の販売を開始します。将来的には、触覚モダリティの画像処理プログラムやハンド形状、接続ロボットアーム等の拡充に合わせて、販売オプションを順次拡充していきます。
◆アプリケーション例:食品加工業界
お弁当や総菜などの多品種・柔軟物の盛付けが求められる食品加工業界向けに、光学式触覚センサを組み込んだロボットシステムを開発しています。滑り分布を活用することで、個体差を吸収しながら最小の力で把持制御できるため、対象物を傷つけず、かつ、取りこぼしの失敗なく盛付けが可能となります。例えば、1週間の中でも、曜日によって唐揚げ、天ぷら、カツなどと盛付の対象が変わっても把持制御可能な「汎用性」が触覚技術を活用したロボットシステムの特徴です。
◆お問合せ先
ご注文や製品仕様や価格等のお問合せは、メールにて、お気軽にご連絡下さい。
・メール:contact@fingervision.jp
◆掲載メディア
・月刊食品工場長2022年10月号(特集 食品工場のスマートファクトリー化と省人化・自動化2022)
https://info.nissyoku.co.jp/modules/kojocho/backnumber_view.php?id=100
・日経クロステック2022.09.20 (ロボットの進化促す最先端技術:内蔵カメラが触覚センサーに、ケーキもつかめる新発想ロボットハンド)
https://xtech.nikkei.com/atcl/nxt/column/18/02183/00005/
・アペルザTV 2022.06.28 (国際食品工業展 特集 ロボット・自動化編)
https://tv.aperza.com/watch/645
・日刊工業新聞 2022.06.08 (つかむ強さ柔軟に変更 フィンガービジョン)
https://www.nikkan.co.jp/articles/view/00638842
◆参加予定イベント(直近のみ)
・CEATEC 2022.10.20 ピッチ登壇、ブース出展 (幕張メッセ)
・Meet Taipei startup festival 2022.11.17-19 (台湾 Garage+ support program)
・ILSスタートアップピッチ 2022.11.29 ピッチ登壇、ブース出展 (虎ノ門ヒルズ)
◆会社概要
・社名:株式会社FingerVision
・代表取締役:濃野友紀
・開発拠点:
-東京都文京区本郷3丁目39-17 KOGAビル3階
-京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・資本金等:104百万円 (資本準備金含む)
・設立:2021年10月
・URL:https://www.fingervision.jp/
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できます。高機能(マルチモダリティ・高分解能)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。

◆光学式触覚センサの特徴
高機能(マルチモダリティ・高解像度)かつ、高耐久でありながら、経済性に優れる実用性なセンサです。
①高機能
カメラで取得した画像情報から力分布(x, y, z方向)のみならず、滑り分布や対象物の重さ、把持位置・姿勢、形状、質感・テクスチャ、異物、温度などのモダリティを画像処理によって取得できます。これは、人のように直接触れることで取得できる、いわゆる「触覚情報」だけでなく、直接触れなくとも目で見て分かる「視覚に相当する情報」をも加えた複数のモダリティをロボット等の制御に活用できることを意味します。
さらに解像度の高いカメラを利用するため、他の種類の触覚センサと比べて、力分布や滑り分布が高解像度です。例えば、滑りの情報は、圧力の中心の滑りからワークの滑りを推定するという従来的なアプローチをとる必要がなく、滑りを直接観察できるため、ロボットの制御に必要な高精度な情報を取得することができます。
また、性能向上のドライバーがソフトウエア側にあるため、機動的な性能アップデートが可能となります(例:製品購入後/レンタル後に利用しながら最新機能がアップデートされる など)。
②高耐久性
ワークとの接触面は透明なアクリル樹脂とシリコンゴムで構成されており、電子基板(カメラ)と外力は物理的に遮断されているため、原理的に高耐久です。皮膚の材料は安価な素材でできており、センサの表面が破損しても、脱着機構となっている表面だけを容易かつ安価に取り替えることが可能です。情報元がカメラ1つであり、複雑な配線も不要であるため利用後のメンテナンス性にも優れています。
③経済性に優れる
「画像(カメラ)に基づく」という特性上、センサを構成するハードウエアの機構が極めてシンプルであり、イニシャル・ランニングの両面で原価が低く経済性に優れます。
また、市販のロボットアームに装着できるため、安価なロボットアームを選定すれば、その分、安価に実利用できます (現状はROS対応のロボットが対象) 。
◆販売ラインナップ
α版という位置づけで、特定の業界やタスク向けに特化された仕様ではなく、汎用的なアプリケーションとして3種類の販売形態([A]~[C])の中から選択できます。物体操作における代表的な触覚モダリティである「力分布」及び「滑り分布」の情報を取得できます。
[A]触覚センサユニット
グリッパに装着するセンサユニットおよび画像処理プログラムが対象になります。
[B]グリッパセット
センサユニットに加えて、ロボットアーム(ROS対応)への装着・把持制御に必要なグリッパや組込制御PCを含むセットとなります。画像処理プログラムや関連ライブラリはインストール済であるため、購入後すぐにロボットアームを活用した把持制御に利用可能です。

[C]評価キット(グリッパセットのレンタル)
グリッパセットに加えて、アプリケーション開発(用途開発)に関わる技術相談、不具合時の交換サポート、消耗品の補填等が含まれるパッケージを1か月単位でのレンタルとしてご利用頂けます。「まずは1度試用してみたい」というニーズをお持ちのユーザ様には、始めやすいサービスとなっています。
[A]~[C]の販売形態問わず、本日より、限定100個の販売を開始します。将来的には、触覚モダリティの画像処理プログラムやハンド形状、接続ロボットアーム等の拡充に合わせて、販売オプションを順次拡充していきます。
◆アプリケーション例:食品加工業界
お弁当や総菜などの多品種・柔軟物の盛付けが求められる食品加工業界向けに、光学式触覚センサを組み込んだロボットシステムを開発しています。滑り分布を活用することで、個体差を吸収しながら最小の力で把持制御できるため、対象物を傷つけず、かつ、取りこぼしの失敗なく盛付けが可能となります。例えば、1週間の中でも、曜日によって唐揚げ、天ぷら、カツなどと盛付の対象が変わっても把持制御可能な「汎用性」が触覚技術を活用したロボットシステムの特徴です。
◆お問合せ先
ご注文や製品仕様や価格等のお問合せは、メールにて、お気軽にご連絡下さい。
・メール:contact@fingervision.jp
◆掲載メディア
・月刊食品工場長2022年10月号(特集 食品工場のスマートファクトリー化と省人化・自動化2022)
https://info.nissyoku.co.jp/modules/kojocho/backnumber_view.php?id=100
・日経クロステック2022.09.20 (ロボットの進化促す最先端技術:内蔵カメラが触覚センサーに、ケーキもつかめる新発想ロボットハンド)
https://xtech.nikkei.com/atcl/nxt/column/18/02183/00005/
・アペルザTV 2022.06.28 (国際食品工業展 特集 ロボット・自動化編)
https://tv.aperza.com/watch/645
・日刊工業新聞 2022.06.08 (つかむ強さ柔軟に変更 フィンガービジョン)
https://www.nikkan.co.jp/articles/view/00638842
◆参加予定イベント(直近のみ)
・CEATEC 2022.10.20 ピッチ登壇、ブース出展 (幕張メッセ)
・Meet Taipei startup festival 2022.11.17-19 (台湾 Garage+ support program)
・ILSスタートアップピッチ 2022.11.29 ピッチ登壇、ブース出展 (虎ノ門ヒルズ)
◆会社概要
・社名:株式会社FingerVision
・代表取締役:濃野友紀
・開発拠点:
-東京都文京区本郷3丁目39-17 KOGAビル3階
-京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・資本金等:104百万円 (資本準備金含む)
・設立:2021年10月
・URL:https://www.fingervision.jp/
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できます。高機能(マルチモダリティ・高分解能)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像