リアルワールド(RLWRLD)、ロボットハンド分析プラットフォーム「All Hands Up!」を公開 ロボットハンド・エコシステムの共通基準点を提示
独自開発のロボティクス・ファウンデーションモデル(RFM)「RLDX-1(リアルデックス)」を中心にPhysical AIのイノベーションを牽引するリアルワールド(RLWRLD、本社:アメリカ 代表:リュ・ジュンヒ/日本法人:東京都千代田区 代表:李勲)は、市販されている多様な多関節ロボットハンド(Dexterous Robot Hand)の実運用データをもとに、設計の実質的な限界とトレードオフを整理した技術レポートおよび可視化機能を提供するウェブサイト「All Hands Up![快堂1] 」(www.allhandsup.org)を公開いたしました。

「All Hands Up!(オールハンズアップ)」は、メーカーが提供するスペックシートだけでは把握が難しいロボットハンドの実際の動作性能と、設計上のトレードオフを分析・公開するプラットフォームです。当社は、研究・産業の現場で繰り返し提起される「どのロボットハンドが実環境で効果的に機能するのか」といった問いに答えるため、これまでの実運用データに基づき本サイトを開発・公開いたしました。
■ロボットハンド設計における構造的な「トレードオフ」
ロボットハンドはPhysical AIにおける中核要素とされていますが、サイズ・把持力・バックドライバビリティ(逆駆動性)の間にある構造的なトレードオフにより、すべての性能を同時に満たす製品の開発は現状困難とされています。
-
サイズと把持力の関係: ロボットハンドのサイズを小型化すると、内部の駆動モーターも小さくなり、握る力(把持力)が低下します。
-
把持力と逆駆動性の関係: 力を高めるためにギア比(モーターに噛み合う歯車の比率)を上げると把持力は強くなりますが、外部の力や衝撃に柔軟に反応する特性である「逆駆動性」が低下します。
このように、一方を改善すると他方が犠牲になる制約があるため、現在の市販製品は設計目的に応じた限界とトレードオフを抱えています。
■ 独自ベンチマーク「DexBench(デックスベンチ)」による客観的指標の提示
リアルワールドは、実際のタスク遂行能力をより正確に評価するため、現場運用の効率に影響を与える主要な設計変数を整理しました。
-
親指の可動範囲(カパンジースケール/Kapandji Scale)
-
指先関節(遠位指節間関節/DIP関節)の独立駆動の可否
-
最小把持可能径(ロボットハンドが掴める物体の最小直径)
-
ハンド外装素材の摩擦特性
これらに加え、独自のベンチマーク「DexBench(デックスベンチ)」を活用し、18種類の実世界操作タスクを基準に、各ロボットハンドの特性と限界を定量的に分析しています。
■ 完璧なハンドがない現実に対する「ハードウェア二元化」戦略
当社は、完璧なロボットハンドがまだ存在しない現実を踏まえ、用途に応じてハードウェアを二元化して運用する現実的な戦略を提示します。
-
現場展開用(Type 1): 実際の産業環境を考慮し、軽量性と高耐久性を優先した実用重視の構造。
-
学習データ収集用(Type 2): AI学習のための微細な操作とデータ取得を可能にする、高い逆駆動性と精密性を備えた構造。
この2つのタイプを相互補完的に活用することが、現在のロボットハンド開発における最適なアプローチであると考えております。
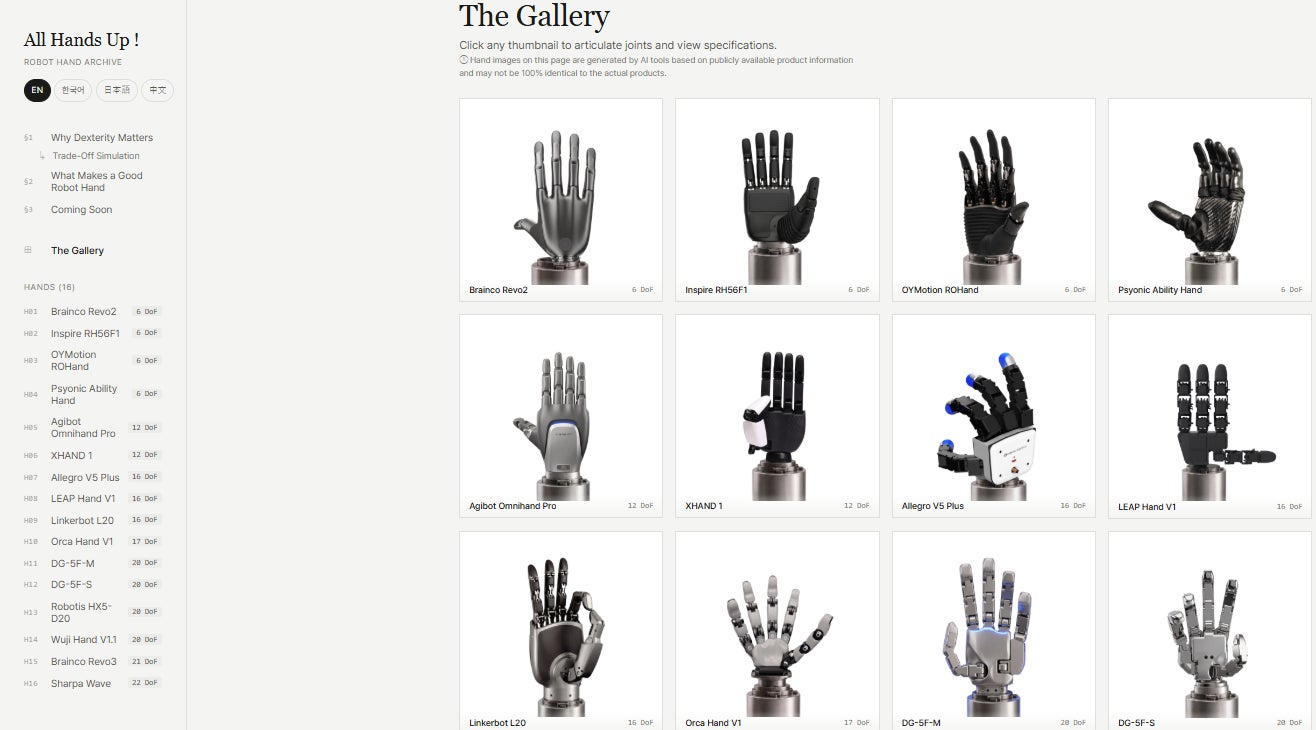
■ Webブラウザ上で検証可能な「URDFベースの可視化機能」
「All Hands Up!」では、リアルワールドが評価したロボットハンドのURDF(ロボット記述の標準フォーマット)ベースのインタラクティブな可視化情報を提供します。
ユーザーは、高価な専門プログラムや個別の開発環境がなくても、Webブラウザ上のマウス操作で複数のロボットハンドの各関節を動かし、目的とする把持形状(物を掴む形)が実現できるかを事前に検証できます。また、製品ごとの主要仕様の比較はもちろん、実際のロボットシミュレーションや開発にそのまま活用できるURDFデータも提供しています(現在、10種類以上の多関節ロボットハンドのデータを収録)。
■ リアルワールド代表 リュ・ジュンヒ コメント
「『All Hands Up!』は単なる製品比較ウェブサイトではなく、ロボットハンド技術の実運用データを産業界全体と共有するオープンプラットフォームです。一度きりの公開にとどまらず、四半期ごとの定期的なコンテンツ更新を通じて、最新のロボットハンド実証データを継続的に蓄積していきます。これにより、メーカーは自社の設計を検証でき、研究者や産業パートナーはロボットハンド導入のための明確な基準を確立できます。共通の基準点を提供することで、ロボットハンド開発エコシステムの発展に貢献してまいります」
■ リアルワールド(RLWRLD)について
リアルワールドは、人間レベルの手の動作能力と認知能力を機械に実装するロボティクス・ファウンデーションモデル(RFM)を開発するPhysical AI企業です。2024年に設立され、米国・韓国・日本にオフィスを構えています。高精度な4D+マルチモーダル産業データを収集・学習する独自のシステムを基盤に、産業環境のロボットが人のように知覚し、理解し、行動する技術を牽引しています。現在は、韓国・日本の主要企業とのパイロットプロジェクトをもとに商用化を進めており、産業用ロボットAI分野におけるグローバルリーダーへの成長を目指しています。
-
設立: 2024年
-
拠点: 米国、韓国、日本
-
事業内容: ロボティクス・ファウンデーションモデル(RFM)の開発、Physical AIソリューションの提供
-
公式ウェブサイト: www.allhandsup.org(本プラットフォーム特設サイト)
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像