BIMデータと連携した自律走行ロボットを共同開発

2019年6月19日
株式会社イクシス
BIMデータと連携した自律走行ロボットを共同開発
~ BIMデータを利用した自己位置認識技術により施工の自動化を目指す ~
株式会社イクシス(本社:神奈川県川崎市、代表取締役:山崎文敬、狩野高志)と安藤ハザマ(本社:東京都港区、社長:福富正人)は、建築工事における施工自動化装置の基盤となる「BIMデータと連携した自律走行ロボット」(図1)を共同開発しました。
1.開発の背景
建設産業では、技能労働者不足が懸念される中、生産性の向上と共に魅力ある産業への変革が喫緊の課題となっており、現場における作業の効率化、苦渋作業や危険作業の削減が求められています。その対策として、ICTを活用し、生産性および安全性の向上を目的とした自動化技術の開発に取り組んでいます。
2.本ロボットの特長
「自律走行ロボット」(以下、「ロボット」)(図2)は、建築工事の施工を自動化する上でロボットが建物内のどの位置に存在しているかを高精度に認識するために開発したもので、その位置を測定するためのプリズム自動追尾型測量機(以下、「測量機」)およびロボットの移動指示と位置確認を行う「位置認識・移動制御システム」(以下、「システム」)(図3)から構成されており、BIMデータと連携した自己位置認識技術により制御されています。なお、システムとロボットおよび測量機のデータ交換は、無線LANにより行います。
ロボットの特長は、以下の通りです。
・BIMデータと連携した自己位置認識技術を搭載したロボットでSLAM(注1)により自律移動する。
・移動指示はシステムから2次元座標(X,Y)により行い、ロボットがその位置近傍まで自律走行する。
・ロボットの移動部には全方位台車を採用している。
・ロボット上部の四隅に360°プリズム(以下、「プリズム」)を設置しているため、ロボットの位置を
3次元座標(X,Y,Z)で確認でき、さらに向きや傾きまで測定が可能。
・測量機は、同時に複数のプリズムを検出できませんが、測量機から検出しやすい1カ所のプリズムを順次露出し、それ以外を遮蔽する機構とシステムから測量機の向きを制御する機構により、複数のプリズムを自動検出することが可能。
・システムの画面に表示されるBIMデータ(3次元モデル)の描画には、ゲームエンジンを採用し、タブレットや汎用パソコンでも快適な動作が可能。
注(1)SLAM(Simultaneous Localization and Mapping):レーザーレンジスキャナなどを利用し取得
した周辺環境の情報から、自己位置推定と地図作成を同時に行うこと。
3.本ロボットによる効果
建築現場における材料の取り付け作業やそのアシスト、および資機材の運搬や検査・点検など、さまざまな作業の自動化装置にロボットの技術を搭載することにより、作業を省力化し、生産性の向上につながります。
4.今後の展開
今後は、ロボットの軽量化および自己位置認識技術の高度化を図り、施工の自動化技術と連携した装置を開発、実用化し、現場への展開を目指していきます。
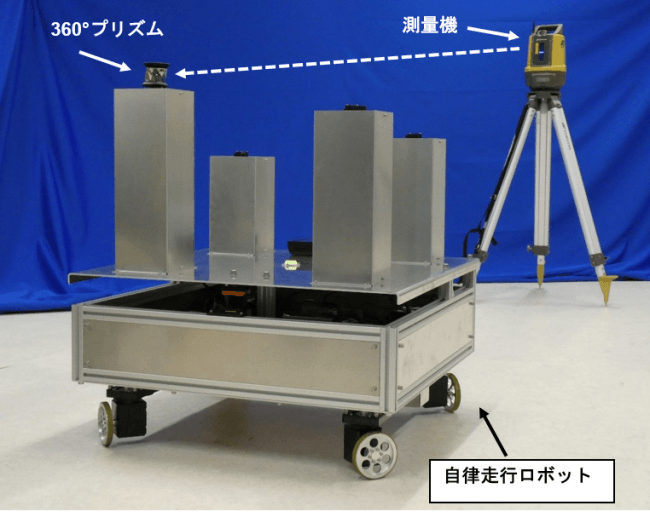
図1:BIMデータと連携した自律走行ロボット

図2:自律走行ロボット
(外形寸法 幅770×奥行770×高さ800mm(プリズム格納時)、重量60kg、走行速度0.5m/秒)
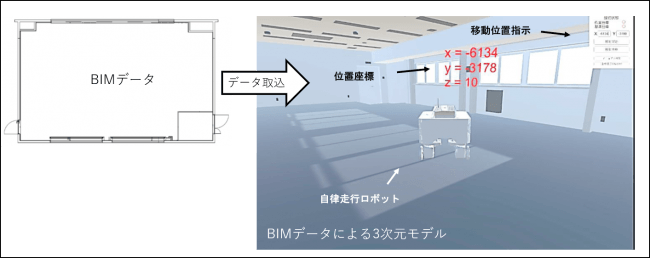
図3:位置認識・移動制御システム
以上
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- 建設・土木電気・ガス・資源・エネルギー
- ダウンロード