【東大発AIベンチャー企業】人工知能を使った自動搬送ロボットの開発に成功 人間とロボットが協働する社会の実現へ
工場・病院等の施設の搬送作業の人手不足解消に貢献する。
「TRUST SMITH株式会社」(本社:東京都文京区本郷4-2-2、代表:渡辺 琢真)は12月26日、人工知能を使った自動搬送ロボットの開発に成功した。

- 自動搬送ロボットの概要

- 従来の「AGV」との違い
従来のAGVは、磁気テープや磁気棒などのガイドを予め施設の床下に埋め込むことで、施設内の決められたルートのみを走行するものだ。同社が開発した自動搬送ロボットは、センサーにより空間の障害物等を認識・回避しながら施設内を自由に走行できるため、走行経路上に想定外の障害物等が置かれていたり、歩く作業員がいたとしても自動で安全に回避し、目的地まで到達することが可能となる。
- TRUST SMITH 社製の自動搬送ロボットの特徴
独自の技術を用いた空間センシング機能により、周辺をセンサーで感知しながら障害物を自動で回避し、荷物を安全に搬送する。施設内の静止した物体だけではなく、移動する人々なども自動で回避しながら走行することが可能となり、従来の搬送ロボットでは不可能とされていた、作業員との協働作業が実現される。
②マッピング機能による直感操作
CADデータを用いて地図内に目的地を設定すれば、その場所まで自動で向かわせることができる。タブレットを用いて誰でも直感的に操作が可能なため、現場での追加の教育コストも不要。
③手軽に導入可能
従来のAGVは、施設への導入時、ガイド等のインフラ整備といった大規模な設備変更が必要になるのに対し、同社が開発した自動搬送ロボットは、既存設備やオペレーションの変更が不要なため、施設のダウンタイムを発生させることなく、すぐに導入が可能。
また、従来のAGVで必要だった、設備変更にともなう莫大な初期費用が不要となり、1台から試験的に導入することが出来る。これにより、リスクを最小限に押さえながら効果検証が可能となり、その後、施設の状況に合わせてロボットの台数を柔軟に調整していくことも出来るという。
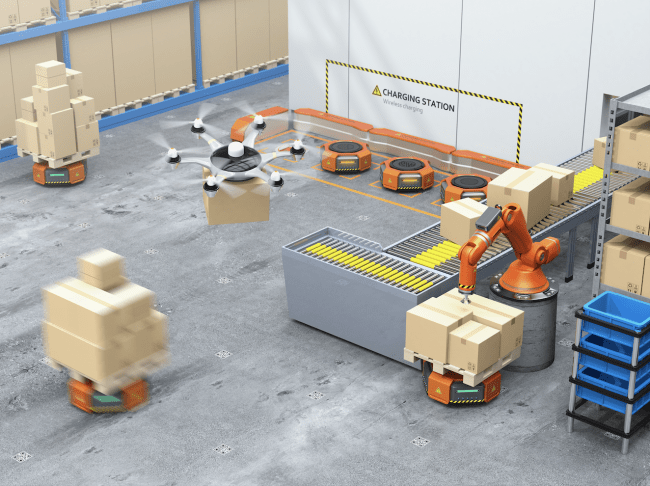
- 障害物回避型アームロボットとの協働
TRUST SMITH 社は、2019年11月、人工知能を使った障害物回避型アームのアルゴリズム開発に成功したことを発表している。この技術は、空間内に存在する障害物をアームロボットが自動で回避し、目的物へアプローチすることが出来るというもので、この技術を実装したアームロボットを工場に導入すれば、これまで手作業で行っていたピックアップ作業を自動で行うことが出来るという。
同社が開発した自動搬送ロボットは、この障害物回避型アームロボットと併用して施設内に導入することが可能となる。従来、搬送ロボットとアームロボットを同時に施設に導入する場合、両機体が稼働中に互いに衝突しないよう、両機体の動作を相互連携させた複雑な動作システムを組み込む必要があった。一方、自動回避が可能な両機体の場合、アームロボットの動作システムと運搬ロボットの動作システムが独立していても、互いに衝突することなく協働することが出来る。

<障害物回避型アームロボットに関するプレスリリース>
【日経新聞】 動く障害物も回避 都内新興企業がAI開発
https://www.nikkei.com/article/DGXMZO53223850R11C19A2L83000/
【PR TIMES】東大発のAIベンチャーが、人工知能を使った障害物回避型アームのアルゴリズム開発に成功
https://prtimes.jp/main/html/rd/p/000000008.000049040.html
- 今後の展開

- TRUST SMITH株式会社 が目指す世界 "より良い未来のために"
- 会社概要
代表者 :代表取締役CEO 渡辺琢真
設立日:2019/1/18
従業員数:25人(非正規含む)
所在地 :〒113-0033 東京都文京区本郷4-2-2 北信ビル4・5・6F
コーポレートサイト:https://www.trustsmith.net/
<本リリースに関するお問い合わせ先>
TRUST SMITH株式会社
担当者:安藤奨馬
e-mail:ando@trustsmith.net
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
