光沢・黒色ワークに強い3Dビジョンカメラ
諦めていた工程のロボット自動化を可能にする!
一般に3Dビジョンセンサー(カメラ)は、構造光(パターン光)を投影しながら撮影することにより3次元座標を取得しています。この方式はカメラのピクセル毎に正確な3次元座標を計算できますが、投影した構造光が鏡のように反射されてしまう光沢面や、光を反射しない黒い表面の3Dデータを得ることが難しいという弱点がありました。
株式会社YOODS(ユーズ)は、最新のAI技術により、これまで3Dカメラが苦手としてきたこれらの表面性状をもったワークの撮影が可能なソリューションをリリースします。この新しいソリューションはこれまでロボットによる自動化が難しかった生産/製造工程の自動/無人化を可能にします。
光沢ワークの撮影サンプル

左のステンレス製カランのような研磨された金属製品、フライスや旋盤で機械加工された金属部品、塗装された車体などの光沢のあるワーク、黒色で光を吸収するワークは従来の3Dカメラでは点群取得が困難でした。
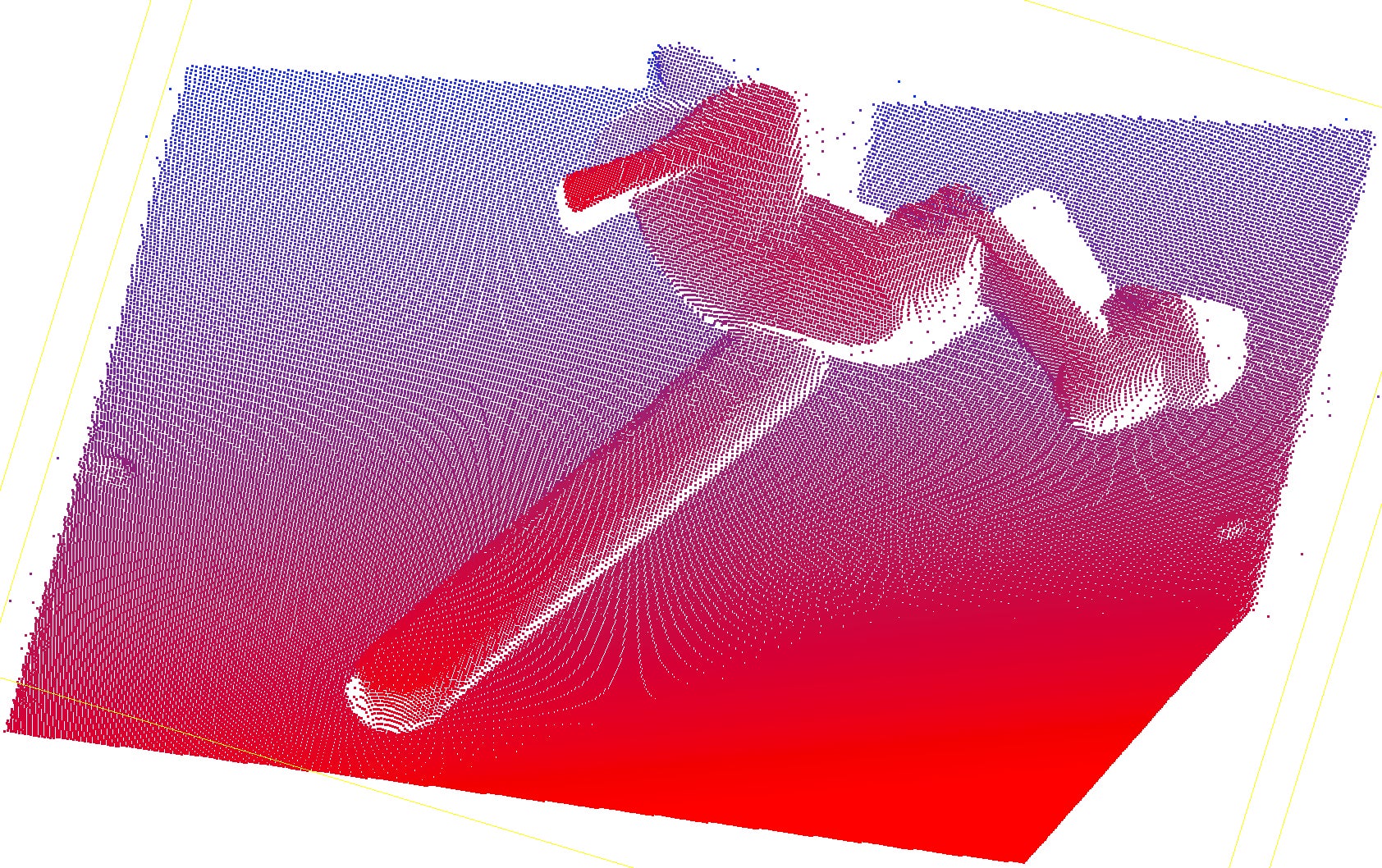
AIを活用した新しい3Dビジョン技術では、このような光沢/黒色ワークでも点群取得が可能になります。
この方法では単純に1対の左右のカメラ画像から点群を生成することができ、明るさの変化に強く、動いているワークの撮影も可能です。
ロボットビジョンへの適用
YOODSは自社開発の3DビジョンセンサーYCAM3Dと、このYCAM3Dをロボットの目として活用するロボットビジョンソフトウェア「ビジュアルティーチ」を開発・提供してきました。
これまで培った3Dビジョン技術と、ロボット制御技術にこの新しいカメラ技術を適用することで、YCAM3D/VT(ビジュアルティーチ)の活用範囲を大きく広げていくことが可能となります。
YOODSの3Dビジョンセンサー YCAM3D/YCAM3DM
YOODSでは15年以上前から3Dビジョンセンサーの開発に取組んできました。現在はFA専用3Dビジョンセンサーとして2種類の筐体で製品をリリースしています。
■FAの現場での豊富な実績
■強靭なハードウェア設計
■高精度なワークの位置/姿勢認識
仕様の詳細については以下のリンクから資料をダウンロードしてください。
d99508-4-ccb3d642ac9a77c1e3c34a93dc938040.pdfビジュアルティーチ (VT)〜ロボットビジョンプラットフォームについて
YOODSはロボットで3Dビジョンを使うために開発した「ビジュアルティーチ(VT)」をベースに以下に紹介する様々なソリューションを提供しています。ビジュアルティーチは
-
ロボット教示を高精度に自動補正
-
CADデータやオフラインティーチングを使わず現場で教示
-
これまでのロボットオペレータが簡単に使える
をコンセプトとして開発されました。ビジュアルティーチのユーザーからは「簡単にすぐに使えて、高速・高精度に動作する」という評価を頂いています。
YOODSの3Dロボットビジョンソリューション
重量物ハンドリング
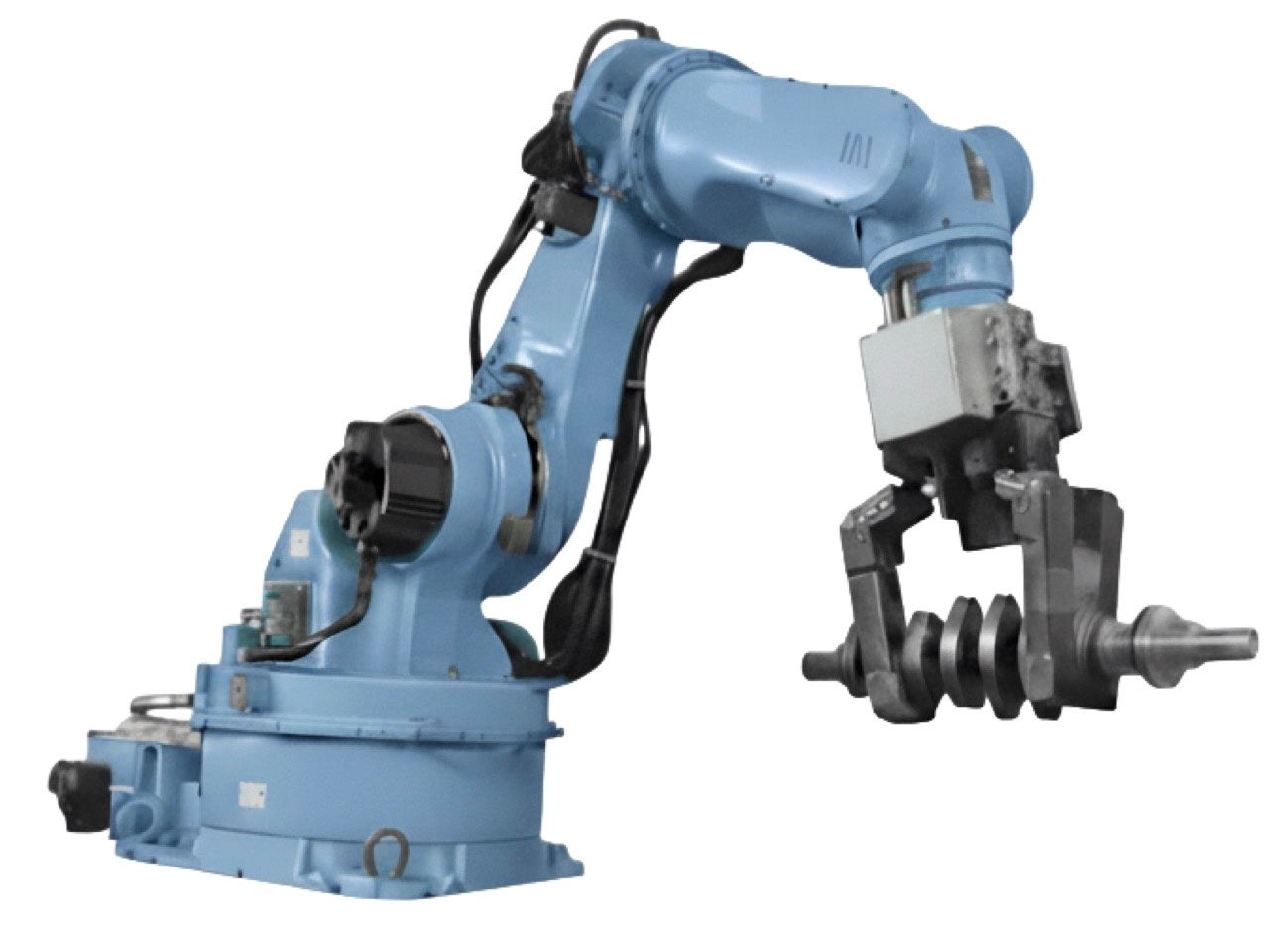
クランクシャフト等の重量物の移載に活用されています。VTのコンセプトで紹介している通り、
アームにカメラを取り付けてワークを撮影してロボットを教示するだけで連続稼働を可能にしています。
また、大型のワーク(自動車のパンパーや車体等)では、ワークを数ヶ所撮影してワーク全体の位置補正が可能です。
高精度バリ取り
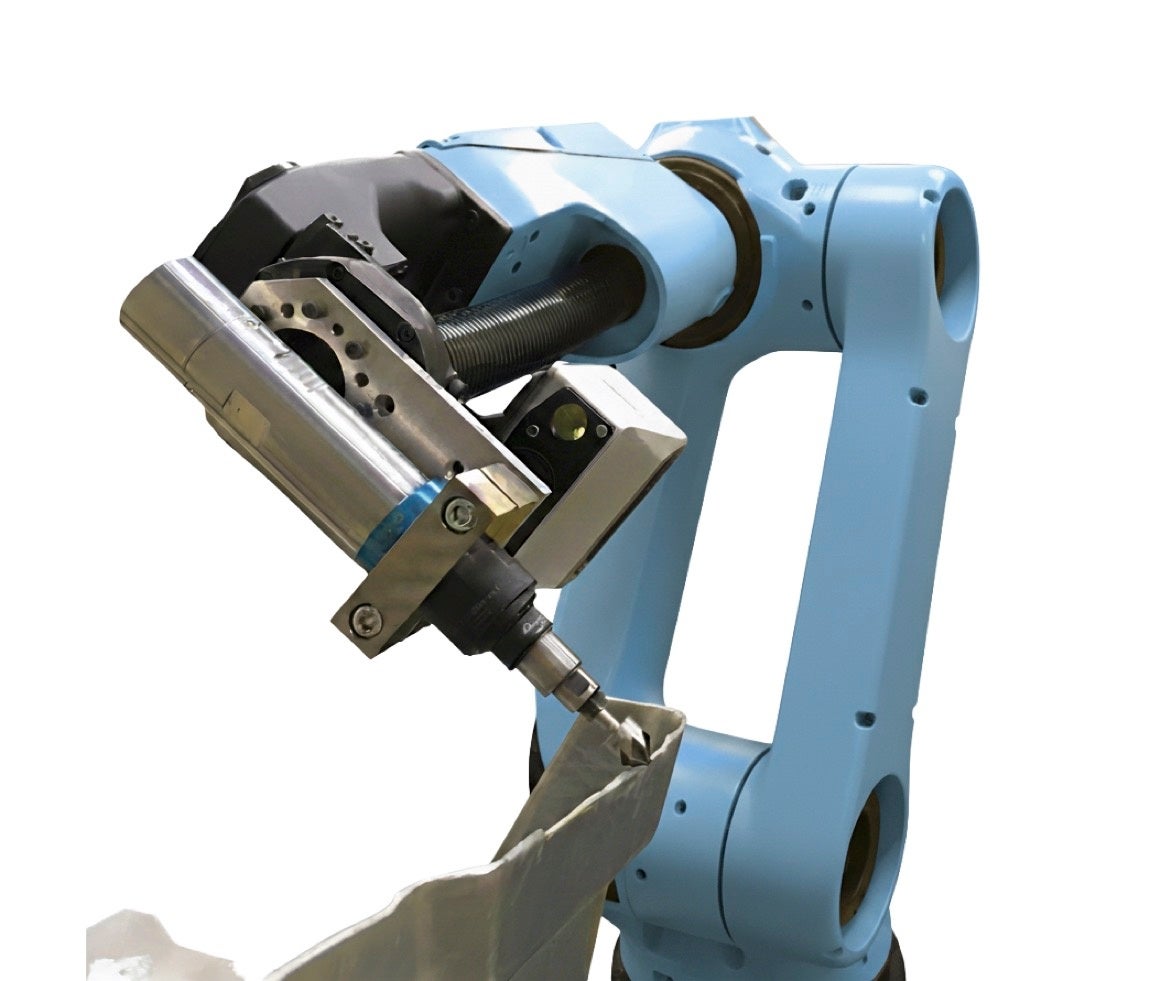
YCAM3D/VTは自動車部品のアルミ鋳物(低圧鋳造,高圧鋳造)で大きな課題となっているバリ取り工程において、チャックされたワークの位置/姿勢を補正して高精度にバリ取りする工程に使われています。
バリ取りツールパスをワークを細かく分割して位置合わせして補正することにより、同品種でも金型の違いにより発生するズレを吸収して、0.1mm精度の追い込みをかけたバリ取り工程を実現しています。
この工程において、ロボットビジョン専用に設計されたYCAM3Dはバリ取りロボットのアームに設置され、オイルミストや切削粉の舞う劣悪な環境でも安定した稼働を続けることができます。
AIデパレタイジング
AI/Dnnを活用した袋や箱のデパレタイジングソリューションです。海外からの船舶輸送で荷崩れした積載袋のデパレや、マスターレスの箱移載に活用されています。この度リリースする技術により、これまで認識の難しかった光沢ワーク等への対応も容易になります。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像