「なぜ?」に答える次世代AI、誕生。市場の”急騰”やシステムの”異常”の要因を解明する、新しい時系列解析ライブラリを開発
“意味ある異常”を見逃さない。因果で読み解く新時代のAIモデル【Λ³JED(Jump Event Detector)】をMITライセンスで無償公開。
株式会社Miosync(東京都千代田区、代表:飯泉真道、並木健剛)は、2025年6月、時系列データにおける突発的変動(ジャンプ)の原因とインパクトを解析・可視化できるPythonライブラリ【Λ³JED(Jump Event Detector:ラムダ・ジャンプ・イベント・ディテクター)】を発表、MITライセンスのオープンソースとして無償公開いたしました。
本ライブラリは、金融市場のショック、アクセススパイク、需要変動といった「突発的かつ非連続な変化」を、AIが“意味あるイベント”として認識し、要因を分離・数値化することで、これまで「ノイズ」や「異常」とされていた現象に因果的な解釈を与える革新的な分析基盤です。
■ 開発の背景:予測だけでは越えられなかった「なぜ?」の壁
社会やビジネスの現場では、「なぜここで急に変化したのか?」という“理由”への問いが増え続けています。
AIや統計モデルの導入が進む一方で、LSTMやARIMAといった従来の時系列解析手法は、滑らかな予測は得意でも、突発的なジャンプや急変を“誤差”として処理してしまう限界を抱えてきました。
しかし、企業活動や科学研究において、真に価値を持つのは往々にして「急に何かが起きた瞬間」です。
Λ³JEDは、その“説明されなかったジャンプ”に対し、単なる異常ではなく、「なぜ起きたのか、どう影響したのか」を構造的に説明する、新しい時系列解釈の道を拓きます。
■ 新ライブラリΛ³JEDの革新性:「履歴・拍動・要因分解」の科学
【Λ³JED】は、この課題を独自の「履歴型ベイズ推論」のアプローチで解決します。データ系列を単なる「点」や「線」としてではなく、「連続的なトレンド(基礎的な流れ)」と「不連続なイベント(拍動)」の混合体として捉え直します。
-
イベントの自動検出と要因の特定
データの中から「いつ、どのようなイベントが起きたか」を自動的に検出します。さらに、そのイベントがシステムの値を「どの方向に、どのくらいの強さで」動かしたのか(因果関係のインパクト)を、統計的信頼度と共に数値で示します。 -
説明可能な予測モデルの構築
「時間経過」「イベントの発生」「局所的な変動性」といった複数の要因が、それぞれどの程度現象に寄与しているかを分離(要因分解)し、ブラックボックスではない、透明性の高い予測モデルを構築します。 -
幅広い応用可能性
金融市場におけるショックの分析、製造ラインにおける異常検知と原因特定、マーケティングにおけるバズ効果の測定、さらにはタンパク質の動的な構造変化の解析といった生命科学分野まで、あらゆる「動的システム」の解明に応用可能です。
Λ³JEDは、時系列を以下の3つの構成要素に分解します。
-
基礎トレンド(β_time):時間の経過に伴う滑らかな変化
-
ジャンプイベント(ΔΛC_pos / ΔΛC_neg):突発的に生じる上昇・下降変動
-
局所的ゆらぎ(β_rhoT):テンション密度として表現されるノイズの活性度
これらを履歴型ベイズ推論により確率的に推定することで、「どのタイミングで」「どの方向に」「どの程度」影響があったのかを、信頼区間(HDI)つきで可視化。
構造的な飛躍を見逃さない、「説明可能なAI(XAI)」を実現します。
■テストデータについて
本論文の実験結果および全てのサンプルグラフは、下記の手順で生成した「合成時系列データ」を用いています。
-
データは全150点の時系列です。
-
ベースラインは、直線成分($0.05 \times t$)と正弦波($\sin(0.2t)$)の合成トレンドです。
-
t=40(+5.0)、t=85(−6.0)、t=120(+4.0)の3箇所に明示的なジャンプイベントを挿入しています。
-
全体に標準偏差0.5のガウスノイズを加えて、現実的な“ゆらぎ”を再現しています。
結果として「滑らかなトレンド」「シャープなジャンプ」「ノイズ」が混在する、現実的なダミーデータとなっています。
■様々なシナリオで検証──「どんなデータでも、本質を見抜くAI」
本ライブラリは以下のような複雑なケースで、誤検出を抑えながら本質的な変化を抽出できることを確認済みです。
1. multi_jump:複数のジャンプイベントを正確に検出・分離
2. mixed_sign:上昇/下降が混在するジャンプを自動的に方向分解
3. consecutive_jumps:短期間に連続発生したイベントの細粒度分離
4. step_trend:基調トレンドの構造的変化(ステップ)も検知
5. noisy / no_jump:ジャンプのないデータでは“曖昧さ”として返し、過検出を防止
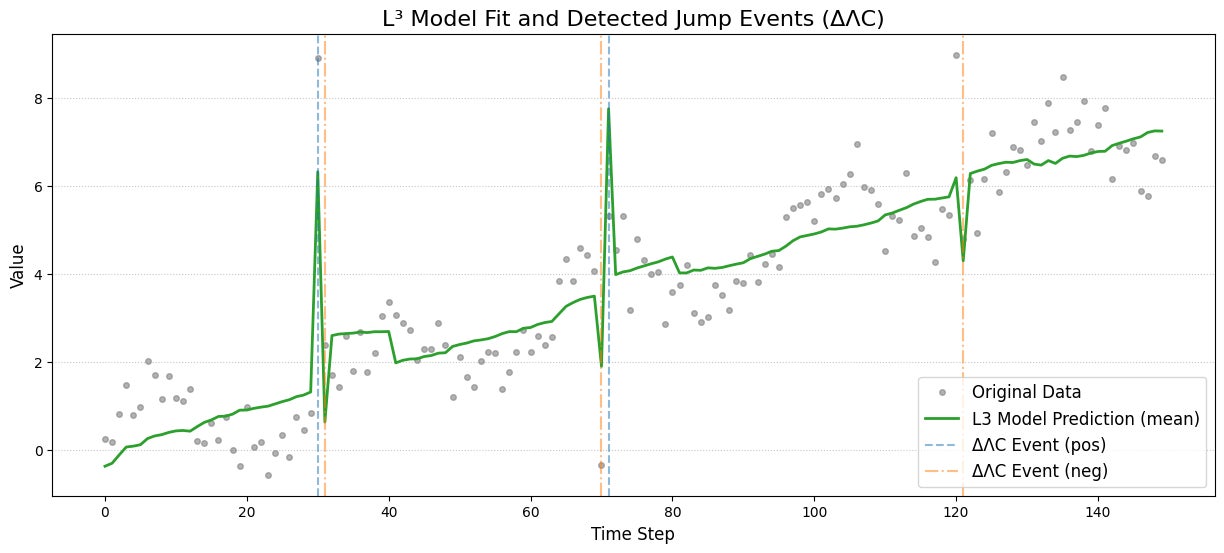
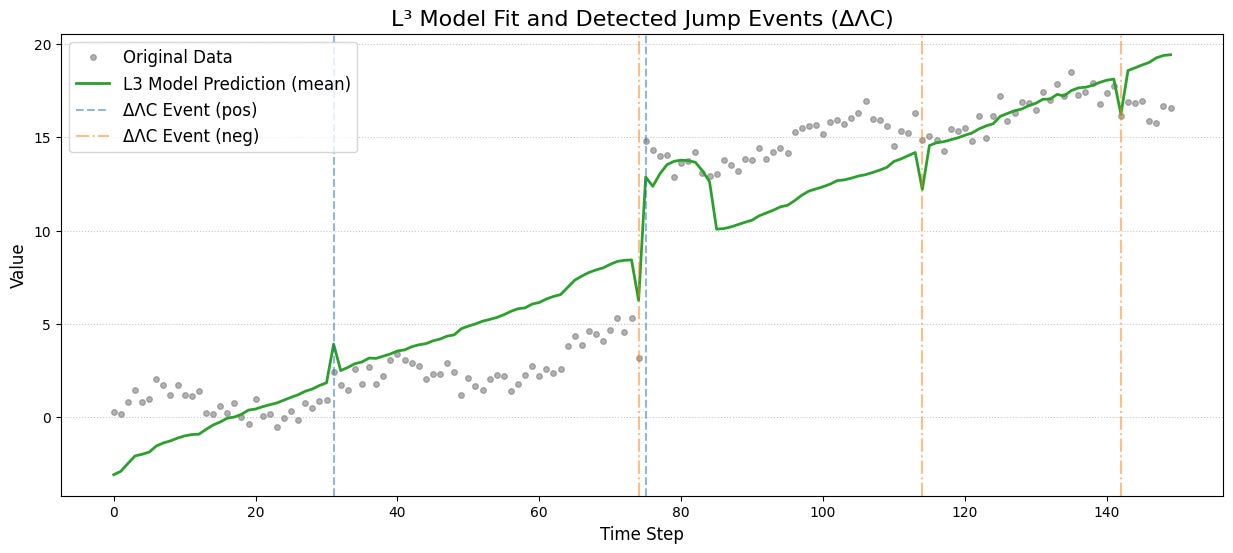
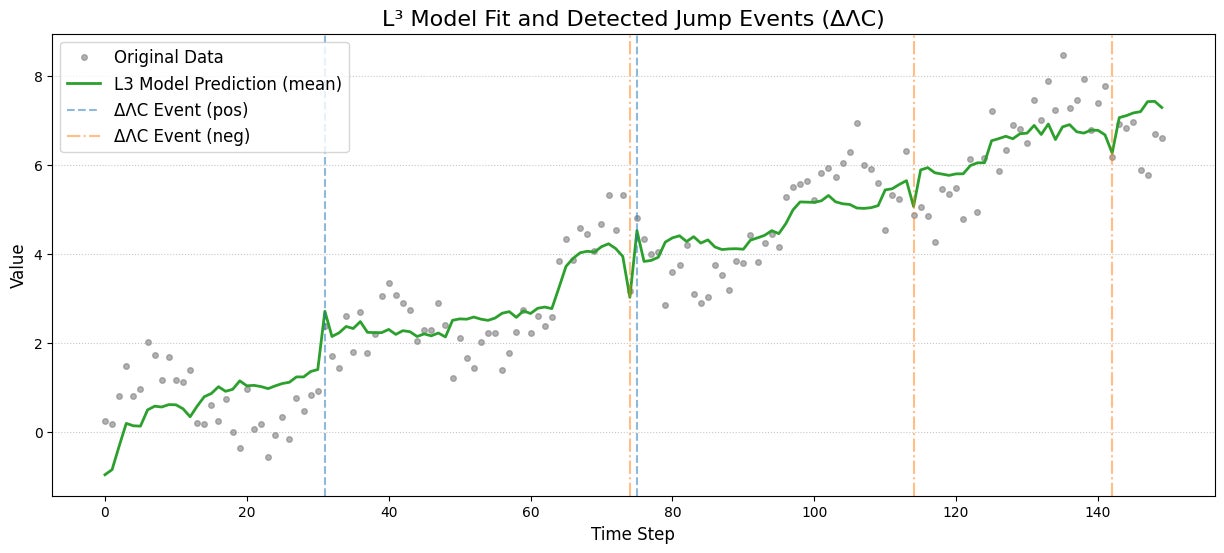
"multi_jump"パターン
データ生成設定
ジャンプイベント(t=30, 80, 110)で「+5」「-7」「+3.5」のジャンプを仕込み。
ベースは緩やかな直線+サイン波のトレンド+ノイズ。
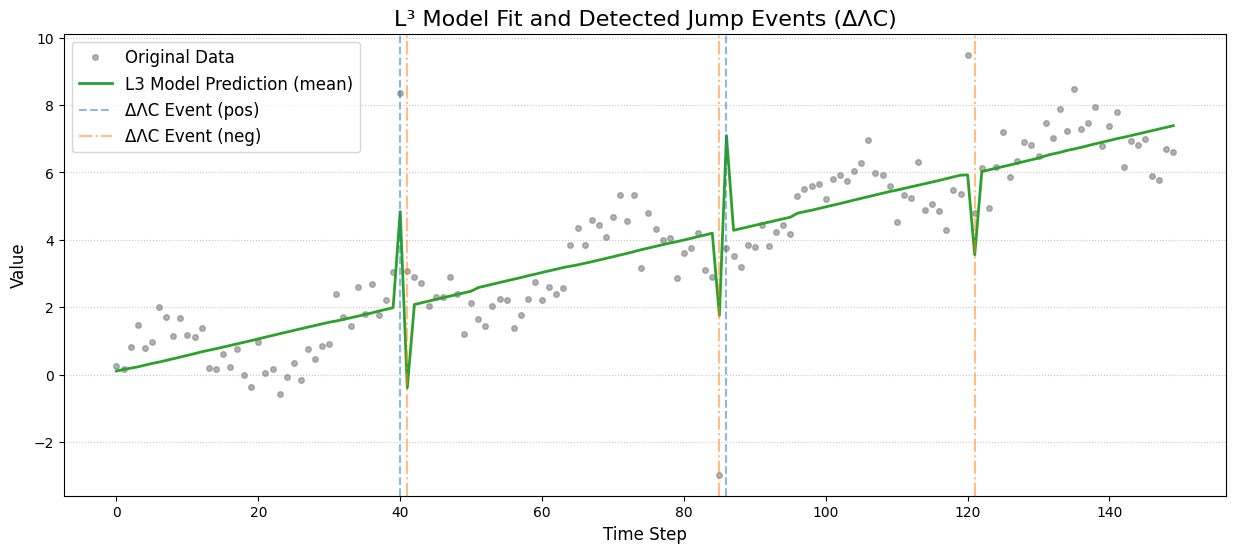
灰色の点は、基礎トレンドに加え、t=30, 80, 110にジャンプ(急変)を加えた合成時系列データ。緑の線は、L³モデルの予測平均。青の破線が正のジャンプ(ΔΛC_pos)、オレンジの破線が負のジャンプ(ΔΛC_neg)を示す。モデルはトレンドと各ジャンプイベント(正負両方)を明確に分離・定量化できている。
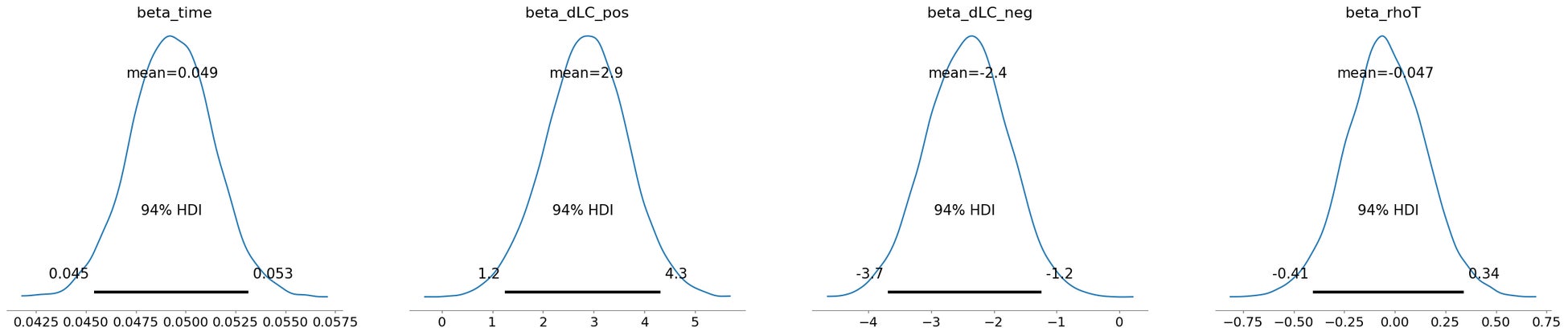
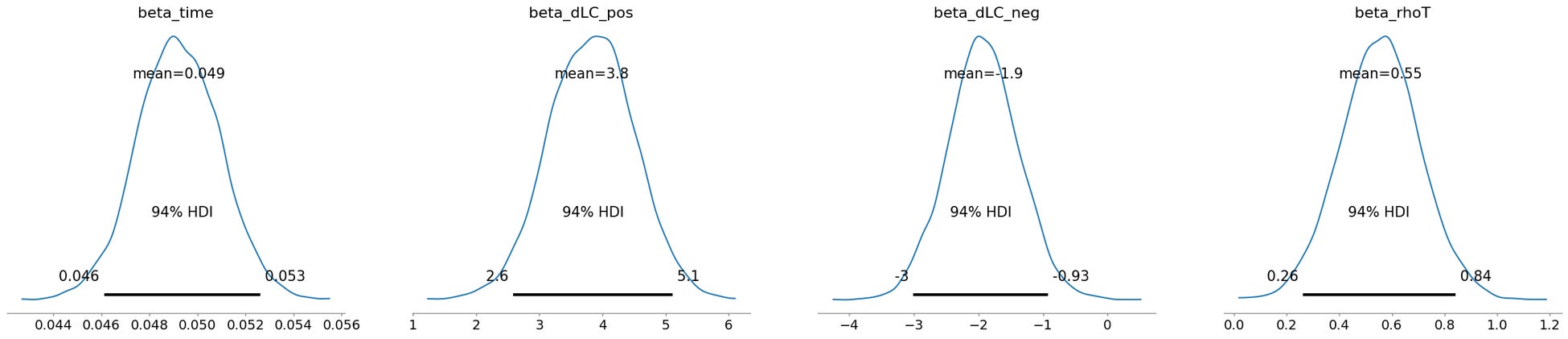
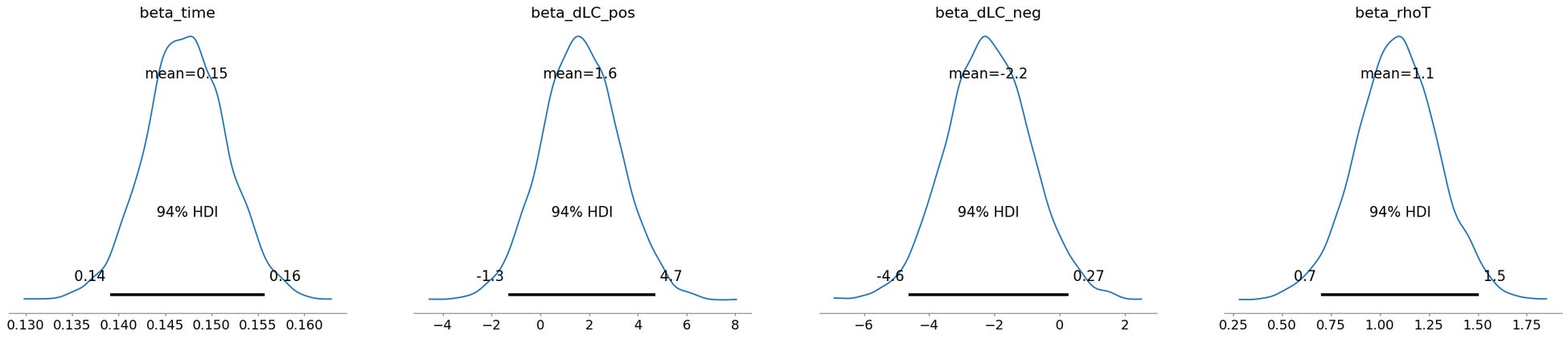
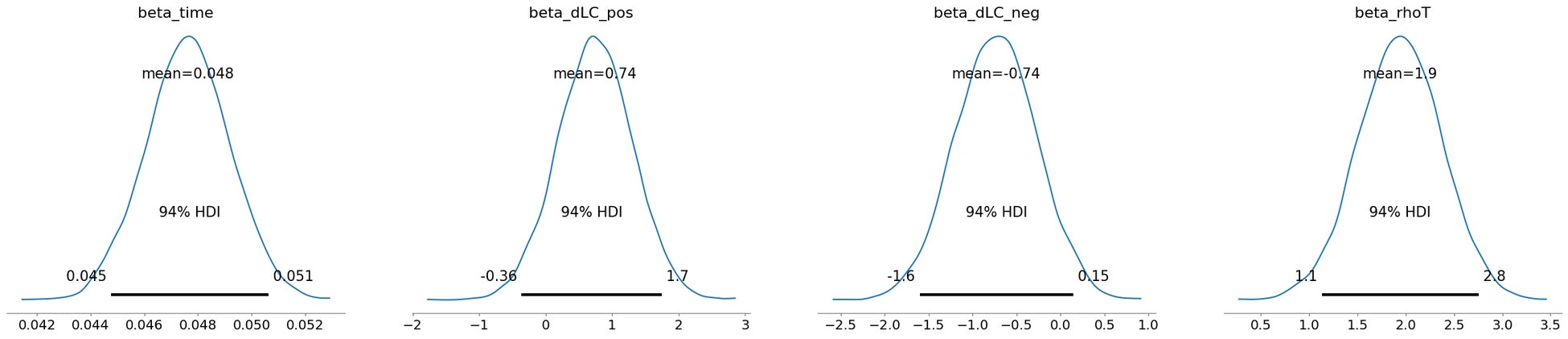
各パネルは主要な回帰係数(beta_time, beta_dLC_pos, beta_dLC_neg, beta_rhoT)の事後分布を示す。平均値と94%HDIを表示。beta_dLC_posは正、beta_dLC_negは負、beta_timeは全体のトレンド傾向を示す。beta_rhoTは局所ゆらぎの影響度。各要因の効果や確信度(不確実性)を事後分布として可視化。ジャンプイベントごとに“押し上げ”や“押し下げ”効果が明確に分離されていることがわかります。
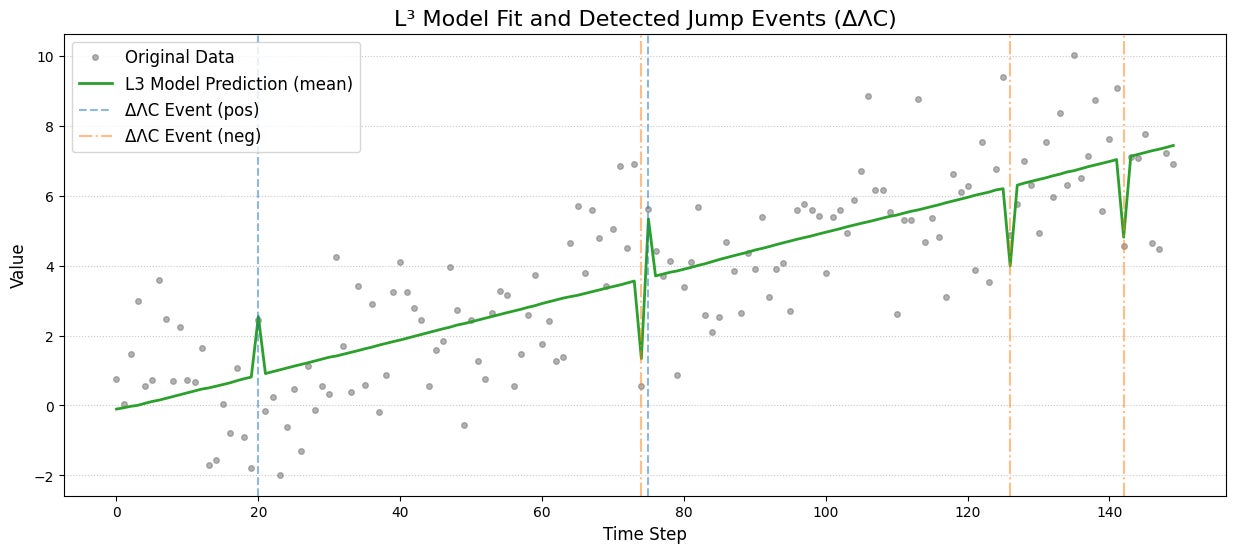
"mixed_sign"パターン
データ生成設定
t=30(+8.0), t=70(-5.0), t=120(+3.5)の“符号が混ざった”ジャンプを設定
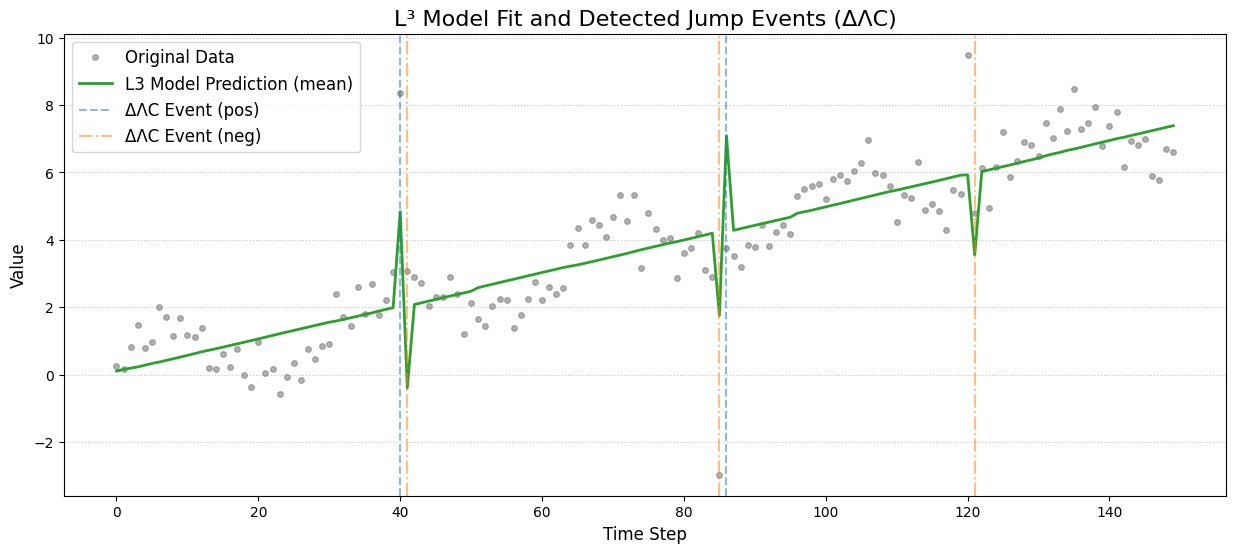
灰色の点は観測データ(トレンド+3カ所の正負ジャンプ+ノイズ)。緑の実線はL³モデルによる予測値(事後平均)。水色の破線はモデルが正のジャンプ(t=30, 120)を検出したタイミング、オレンジの破線は負のジャンプ(t=70)を検出したタイミングを示す。L³モデルは、ジャンプの方向(上昇/下降)まで自動で分離し、それぞれのイベントの影響度を定量的に推定できていることが確認できる。
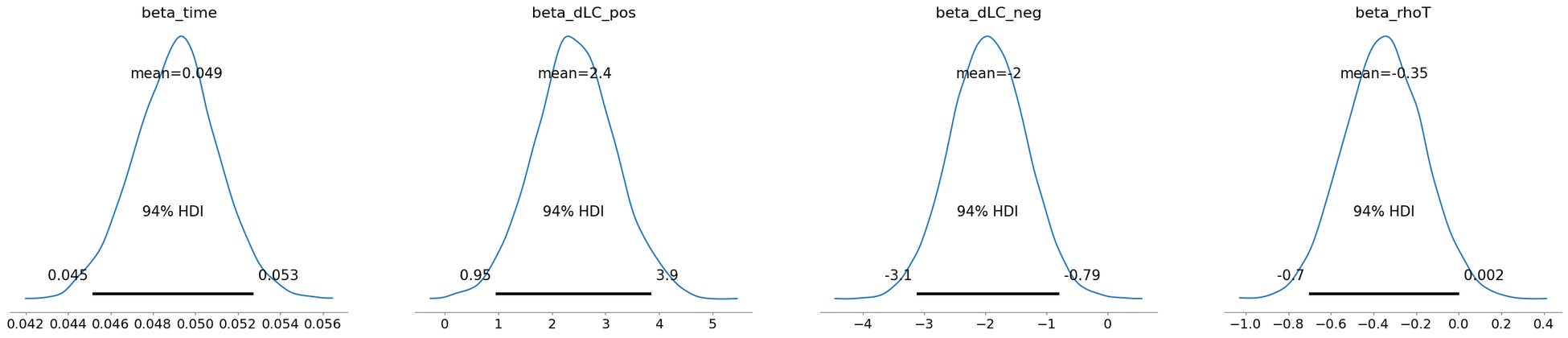
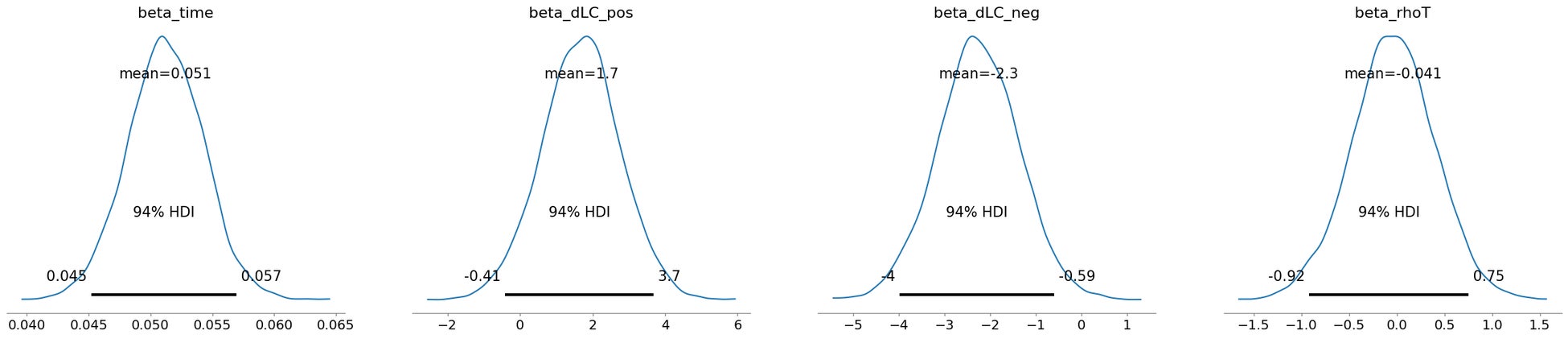
左から順に、
beta_time:全体トレンド(時間経過)の傾き / beta_dLC_pos:正のジャンプイベントの影響度 / beta_dLC_neg:負のジャンプイベントの影響度 / beta_rhoT:テンション密度(局所的なゆらぎ)
それぞれの分布は「94%信頼区間(HDI)」と平均値を表示。特に beta_dLC_pos と beta_dLC_neg が「0」をまたがず、モデルが正・負それぞれのジャンプを明確に区別して要因分解していることが一目で分かる。
"consecutive_jumps"パターン
データ生成設定
t=30(+8.0), t=70(-5.0), t=120(+3.5)の“符号が混ざった”ジャンプを設定
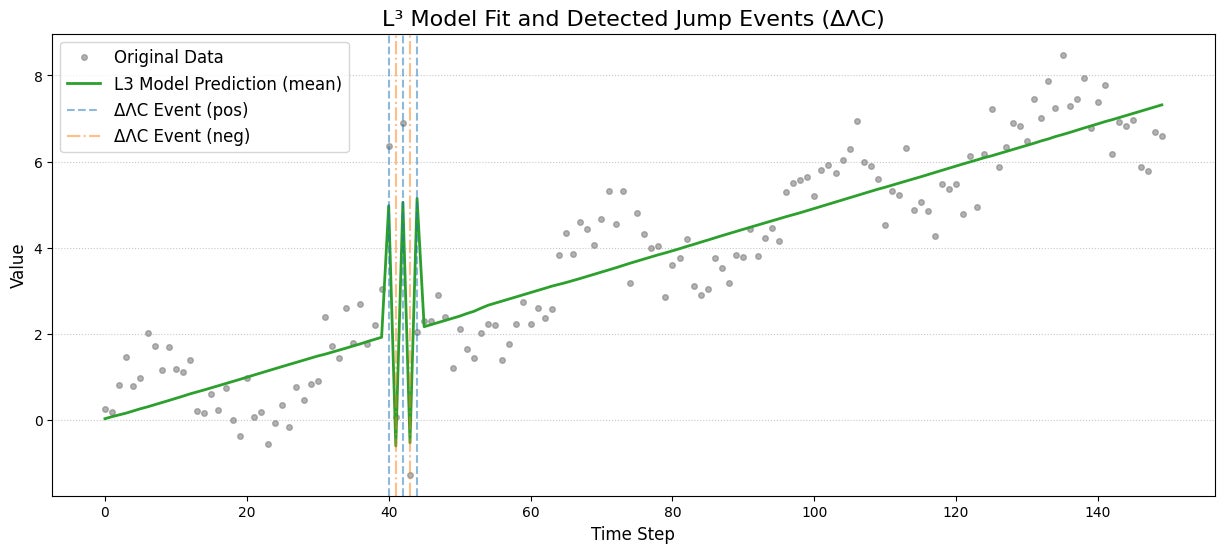
グラフキャプション例
灰色点は観測データ、緑線はモデル予測、水色・オレンジ破線はt=40〜43で連続した正・負ジャンプイベントを示している。短い期間に連続して発生するジャンプイベントも、それぞれの符号(正・負)ごとに細かく分解・検出している。
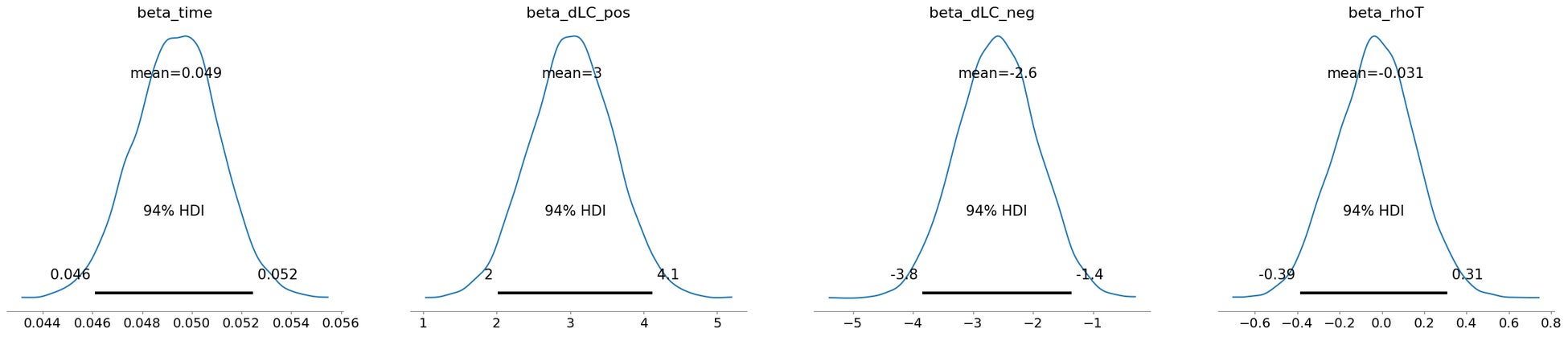
beta_dLC_pos/beta_dLC_negの分布に、連続ジャンプの累積効果が現れている。
"Step_trend"パターン
灰色の点: 観測データ(0~149時点、T=150)、緑線: Lambda³モデルによる予測(平均値)。トレンドがt=75で10だけ急激に上昇する“段差”を滑らかにキャッチ。水色破線: 検出された正のジャンプイベント(ΔΛC_pos)、オレンジ破線: 検出された負のジャンプイベント(ΔΛC_neg)。
このシナリオでは、トレンド(基調)の急激な上昇(ステップ)もLambda³モデルによって構造的な変化(イベント)として自動検出されている。ランダムノイズや外れ値に惑わされず、本質的な変化のみを捉えている点が特徴。
beta_time: トレンド傾きの事後分布(ステップ直後で右肩上がりが強調される)
beta_dLC_pos: 正ジャンプイベントの寄与度
beta_dLC_neg: 負ジャンプイベントの寄与度
beta_rhoT: テンション密度(局所ゆらぎ)の効果
解説:
ステップ変化を正のジャンプイベント(beta_dLC_pos)として強く検出、同時に、右肩上がりのトレンド(beta_time)やノイズ寄与(beta_rhoT)も可視化できる。
"noisy"パターン
グレーの点:観測データ(今回はジャンプイベント無し、ノイズが非常に大きい)、緑の線:モデルによる予測値(平均)、水色破線:ΔΛC Event (pos)(ジャンプイベントとして検出された正の急変ポイント)、オレンジ破線:ΔΛC Event (neg)(ジャンプイベントとして検出された負の急変ポイント)
この検証では、明示的なジャンプイベントを含まないノイズの多い時系列を使用。
本データには明示的なジャンプは含まれていないが、ノイズの大きさにより、一部のゆらぎがジャンプイベントとして誤検出されている。これはΔΛCが「異常値」ではなく、“統計的に目立つ変化”として反応する設計であるため、検出イベントの信頼性は、事後分布やHDI(信頼区間)の幅によって評価できる。
beta_time(トレンド傾き)は平均0.051でトレンドを捉えている。
beta_dLC_pos・beta_dLC_negはHDI幅が広く0も跨ぐ傾向が強い(≒「ジャンプ検出には確信が持てない」)。
beta_rhoT(テンション密度)も0付近、今回のノイズには特段寄与しない。
「真のジャンプイベントがないデータだとモデルも“曖昧さ”を出力する」ことが可視化できている。
"NO_jump"パターン
灰色の点:元データ(連続トレンド+ノイズ。ジャンプイベントは“本来なし”)、緑の線:Λ³モデルがフィットした予測(平均値)。大きな飛び抜けたジャンプは検出されていない。破線(青/オレンジ)、ΔΛC(ジャンプ)イベントの検出結果。ほぼ目立ったジャンプイベントは現れない、もしくは偶発的にノイズに反応する程度。
beta_time … トレンド成分の傾き。ノイズだけでもおおむね正しく背景トレンド(0.05程度)を再現。
beta_dLC_pos / beta_dLC_neg … ジャンプイベント正負の寄与。**値が0付近でHDIも0を跨ぐため「有意なジャンプは検出されていない」**ことを意味。
beta_rhoT … テンション密度(ノイズ由来のゆらぎ)。ノイズが強い場合この値が上昇しやすいが、ジャンプの影響度は低い。
■Λ³JEDモデルが備える、4つの本質的な強み
-
「ジャンプがなければ“ない”と返す」自己認識力
Λ³JEDは、変化が“意味あるイベント”でない場合、それを無理に解釈しようとはしません。
信頼区間(HDI)が広がる=確信が持てないという判断もまた、ベイズ的知性のひとつ。
不要な過学習や誤検出を避け、“わからないことをわからないままにする勇気”を持ったAIです。 -
“うまく説明できない現象”も、発見の契機に変える
Λ³JEDは、拍動モデルでは説明しきれないケースに遭遇したとき、それを“失敗”とは捉えません。
むしろそこに「構造的に未定義の何かが潜んでいるかもしれない」というヒントを与えてくれます。
それは、AIが単なる道具ではなく、“科学的発見の装置”になり得るということの証です。 -
ジャンプが存在する場合は、明快に要因分解
ジャンプ、トレンド、ノイズ──Λ³JEDはそれぞれを統計的に分離し、上昇/下降イベントの影響度を94%HDIで定量化します。
ポジティブ/ネガティブなイベントを区別し、ブラックボックスではない、真正の“説明可能AI(XAI)”を実現します。 -
シンプルな構造、無限のカスタマイズ
Λ³JEDは明快な構造を持つからこそ、現場に応じた最適化が自在です。
・ΔΛCの閾値調整・テンション密度(ρT)の代替指標導入
・特定区間のprior強化
・多系列・階層モデルへの拡張も容易
ユーザー自身の文脈知を活かして“構造を育てる”ことができるAI。
それがΛ³JEDの知性であり、柔軟さです。
このモデルが語るのは、数値ではなく“構造の意味”
Λ³JEDは変化を数字で追いかけるのではなく、構造のズレとして理解しようとする知性です。
それは、データの裏側にある「なぜ?」を問い続けるAIであり、失敗や曖昧さすらも、未来の発見へと繋ぐ“科学の相棒”です。
■開発者のコメント
私たちは長い間、現実世界の複雑な現象を、あまりに滑らかな線や点で捉えすぎていました。しかし、世界は“拍動”に満ちています。重要なのは、その拍動のリズムと、なぜそれが起きるのかを理解することです。このライブラリが、世界中の開発者や研究者にとって、現象の背後にある『物語』を解き明かすための新しい『計算論的顕微鏡』となることを願っています。イノベーションの探求は、一部の専門家だけのものではありません。だからこそ、誰もが自由に使える形で公開することに決めました。
■今後の展望
今後は、コミュニティからのフィードバックを積極的に取り入れ、さらなる機能拡充とアルゴリズムの高度化を目指します。また、様々な分野の研究者や企業との連携を通じて、具体的な課題解決に向けたユースケースを創出していく予定です。
■ライブラリの概要
ライブラリ名: 【Λ³JED:lambda3_jump_event_detector】
プログラミング言語: Python
主要ライブラリ: PyMC, ArviZ, NumPy, Matplotlib
ライセンス: MITライセンス
GitHubリポジトリURL: https://github.com/miosync-masa/bayesian-event-detector
プレプリントURL:https://zenodo.org/records/15672314
■お問い合わせ先
lambda3プロジェクト窓口
contact:info@miosync.email(担当:飯泉)
HP:https://www.miosync.link/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- その他
- ビジネスカテゴリ
- 法務・特許・知的財産システム・Webサイト・アプリ開発
- ダウンロード