複数ワークのハンドリングを実現する「ラティス構造柔軟指」、株式会社デンソーで導入
フィンガ交換やツールチェンジを不要にし、現場の生産性向上を支援
北九州⾼専発ロボットスタートアップ、キックロボティクス株式会社は、多品種ワークや異形状ワークをフィンガの段取り替えやツールチェンジを行わず、ハンドリングできる「ラティス構造柔軟指(以下、柔軟指と略す)」を株式会社デンソー西尾製作所工場内の搬送ラインに導入しました。

「柔軟指」導入前の課題
株式会社デンソー西尾製作所は、既存の搬送ラインにおいて、多品種化したワークのハンドリングにあたり、以下の課題を抱えていました。
-
ワークごとに形状が異なるため、既存フィンガでは安定した把持が難しい
-
フィンガの段取り替えを行い、ハンドリングすると、サイクルタイムが増加してしまう
-
形状可変機構つきのフィンガを使用し、ハンドリングすると、ロボットの可搬重量を超過してしまう
「柔軟指」選定の理由
-
高い形状ならい性があるため、多品種・異形状のワークに対しても安定した把持が可能であること
-
既存フィンガに被せる形で使用できるため、フィンガの段取り替えや機構変更などが不要であること
「柔軟指」導入による効果
-
形状の異なるワークの安定したハンドリング
-
交換不要で60万回程度の繰り返し動作
「柔軟指」について
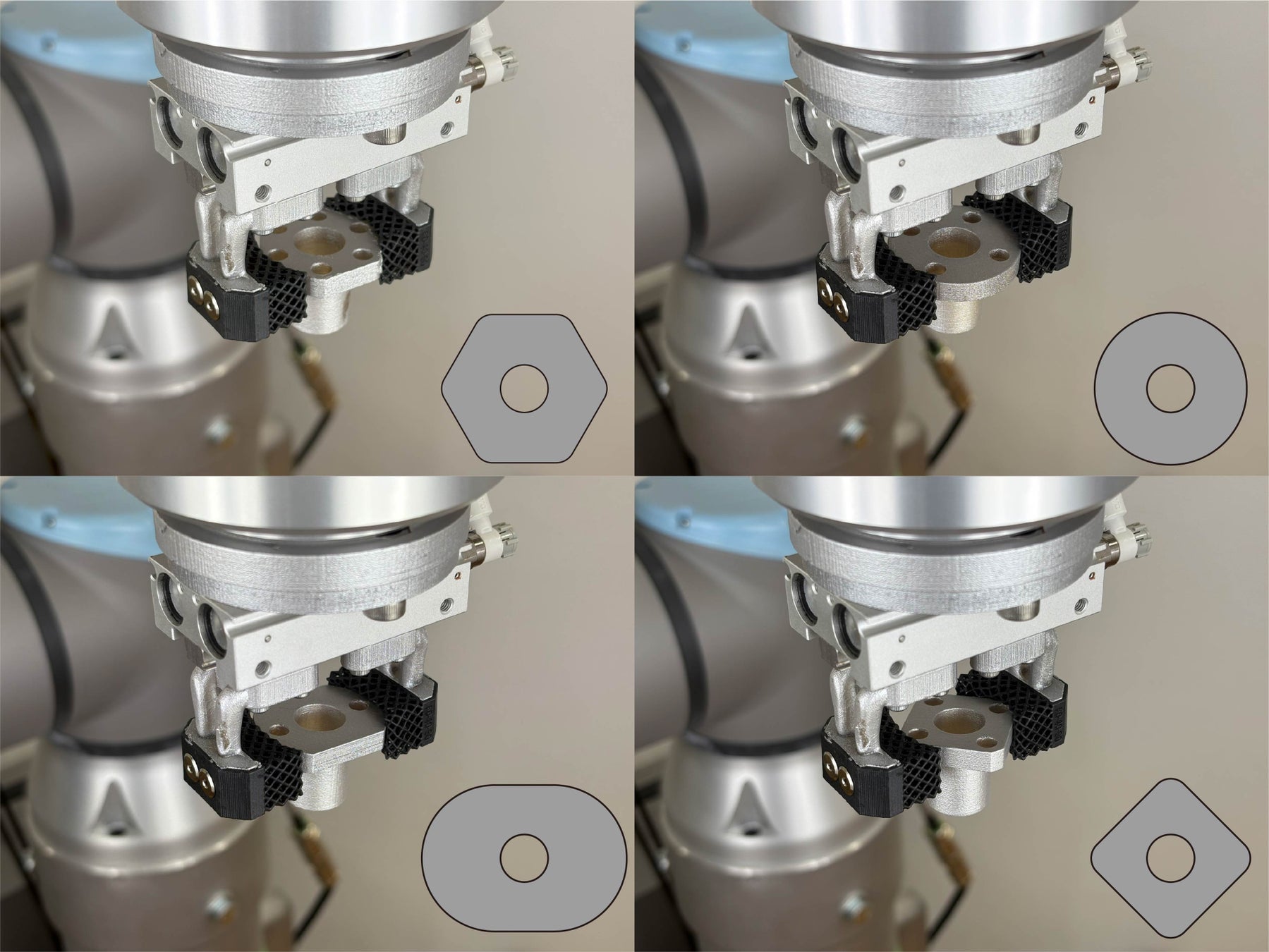
ラティス構造と呼ばれる立体の格子構造で構成されており、3Dプリンタでしか造形できない複雑形状をしています。この構造によって耐久性をそのままに「やわらかさ」を実現し、複雑な対象物の形状にならい安定した把持が可能となります。

「柔軟指」の特徴について
-
高い形状ならい性で柔らかく・しっかり把持
ラティス構造により、様々な形状をチャック可能です。ラティス構造とは、枝状に分かれた格子を周期的に並べて立体化したもので、複雑な形状を掴む時にもその形に変形して包み込むように持ち上げてくれます。
-
高い耐久性で長持ち
強度のある素材を使って、構造によって変形を適切に調整し「やわらかさ」を実現しているので、高い耐久性能が期待できます。
-
3Dプリンタ活用による設計自由度の高さ
3Dプリンタで成形するため、設計自由度が高く、要望に応じて様々な形状で製造可能です。
「柔軟指」の把持試験サービス及び構想・見積りサービスについて
把持試験サービス
対象物の把持可否を事前に確認できるサービスです。このサービスでは、お客様の実物ワークを用いて把持の可否や安定性を評価し、導入可能性を検討します。導入前の「本当に掴めるのか?」という不安を解消し、よりスムーズな現場適用を支援します。

構想・見積りサービス
使用中、または使用予定のハンドやワーク情報等をアップロードいただくだけで、柔軟指のイメージ図と概算価格をご提示いたします。
URL:https://forms.gle/wnHZhpAipNDjGuVs6

会社概要
社名:KiQ Robotics株式会社(キックロボティクス)
本社所在地:福岡県北九州市小倉北区浅野1-1-1
代表取締役CEO:滝本隆
設立:2019年4月25日
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像