建設機械を遠隔操縦できる人型ロボット「DOKA ROBO 3」を開発
災害復旧現場、危険地帯での利活用を視野にレンタル提供
「DOKA ROBO 3」は、建設機械を操縦できる人型ロボットです。建設機械のコックピット(運転席)に双腕双脚のロボット本体を設置し、オペレータはコックピット型コントローラに搭乗してロボットを遠隔操作することで、建設機械の遠隔操縦を実現できます。
株式会社カナモト(本社:北海道札幌市、代表取締役社長:金本 哲男)、株式会社KGフローテクノ(本社:東京都港区、代表取締役社長:渡部 純)、株式会社富士建(本社:佐賀県佐賀市、代表取締役社長:牧薗 博文、専務取締役・ロボット開発:角 和樹)、アスラテック株式会社(本社:東京都千代田区、代表取締役社長:酒谷 正人、チーフロボットクリエイター:吉崎 航)は共同で、建設機械を操縦できる人型ロボット「DOKA ROBO 3」(ドカロボ スリー)を開発しました。油圧ショベルなどの建設機械の運転席にDOKA ROBO 3を設置し、オペレーターがDOKA ROBO 3を遠隔操作することで、ロボットを使った建設機械の操縦が可能になります。
建設機械を遠隔で操縦できるようにするには、これまでは建設機械そのものの改造を伴う方法が一般的でした。しかしDOKA ROBO 3では、運転席にロボットを設置するだけで建設機械の遠隔操縦を実現できます。運転席への設置は約1時間、撤去は約30分と、短時間での建設機械の遠隔操縦化が可能です。また、動力源は建設機械のバッテリーを使用するため、ロボットのみがバッテリー切れする心配はありません。オペレーターの操作端末とDOKA ROBO 3とをつなげる無線環境は、特定小電力無線や無線LANに加え、移動通信網などの公衆回線にも対応しており、距離の制限なく遠隔操作が可能になっています。
DOKA ROBO 3では、建設機械のコックピットの形状をした搭乗型の専用コントローラーも用意されています。オペレーターはこの専用コントローラーに搭乗して、DOKA ROBO 3のカメラ映像を見ながら操作することで、実際の建設機械に乗っているのと同じ感覚で操縦できます。なお、DOKA ROBO 3の制御ソフトウエアには、アスラテック株式会社が開発したロボット制御システム「V-Sido」(ブシドー)を採用しており、多彩な操作方法で制御することが可能です。搭乗型の専用コントローラー以外にも、オペレーターの首の動きに合わせてDOKA ROBO 3の首を動かすことが可能なヘッドマウントディスプレーや、小型のプロポ型のコントローラーなどが利用可能です。将来的にはブルドーザ、キャリー、クレーンなどの建設機械に対応予定です。
DOKA ROBO 3により、災害時の危険地域など人が入っていけない場所でも建設機械を動かすことが可能になります。また、MC(マシンコントロール)搭載機に使用することにより設計データ通りの施工が可能となります。プロトタイプに相当する従来機の「DOKA ROBO」「DOKA ROBO 2」は、2014年から2015年にかけて国土交通省が実施した「次世代社会インフラ用ロボット開発・導入現場実証(災害応急復旧)」で活用しました。
今後、DOKA ROBO 3は展示会などのイベントに出展して広く告知するほか、国土交通省の「新技術情報提供システム」(NETIS)への登録も予定しています。DOKA ROBO 3はレンタルでの提供を予定しており、株式会社カナモトが随時対応していく予定です。
建設機械を遠隔で操縦できるようにするには、これまでは建設機械そのものの改造を伴う方法が一般的でした。しかしDOKA ROBO 3では、運転席にロボットを設置するだけで建設機械の遠隔操縦を実現できます。運転席への設置は約1時間、撤去は約30分と、短時間での建設機械の遠隔操縦化が可能です。また、動力源は建設機械のバッテリーを使用するため、ロボットのみがバッテリー切れする心配はありません。オペレーターの操作端末とDOKA ROBO 3とをつなげる無線環境は、特定小電力無線や無線LANに加え、移動通信網などの公衆回線にも対応しており、距離の制限なく遠隔操作が可能になっています。
DOKA ROBO 3では、建設機械のコックピットの形状をした搭乗型の専用コントローラーも用意されています。オペレーターはこの専用コントローラーに搭乗して、DOKA ROBO 3のカメラ映像を見ながら操作することで、実際の建設機械に乗っているのと同じ感覚で操縦できます。なお、DOKA ROBO 3の制御ソフトウエアには、アスラテック株式会社が開発したロボット制御システム「V-Sido」(ブシドー)を採用しており、多彩な操作方法で制御することが可能です。搭乗型の専用コントローラー以外にも、オペレーターの首の動きに合わせてDOKA ROBO 3の首を動かすことが可能なヘッドマウントディスプレーや、小型のプロポ型のコントローラーなどが利用可能です。将来的にはブルドーザ、キャリー、クレーンなどの建設機械に対応予定です。
DOKA ROBO 3により、災害時の危険地域など人が入っていけない場所でも建設機械を動かすことが可能になります。また、MC(マシンコントロール)搭載機に使用することにより設計データ通りの施工が可能となります。プロトタイプに相当する従来機の「DOKA ROBO」「DOKA ROBO 2」は、2014年から2015年にかけて国土交通省が実施した「次世代社会インフラ用ロボット開発・導入現場実証(災害応急復旧)」で活用しました。
今後、DOKA ROBO 3は展示会などのイベントに出展して広く告知するほか、国土交通省の「新技術情報提供システム」(NETIS)への登録も予定しています。DOKA ROBO 3はレンタルでの提供を予定しており、株式会社カナモトが随時対応していく予定です。
 写真1■DOKA ROBO 3は、質量10Kgの上半身と質量8Kgの下半身に分割して持ち運ぶことができ、特別な器具を使うことなく組み立てて運転席に設置できる
写真1■DOKA ROBO 3は、質量10Kgの上半身と質量8Kgの下半身に分割して持ち運ぶことができ、特別な器具を使うことなく組み立てて運転席に設置できる
 写真2■搭乗型の専用コントローラーは、普段から建設機械の操縦に携わっているオペレーターが操作しやすいよう、実際の大型ショベルのコックピットをベースにつくられている。DOKA ROBO 3本体と一緒にして、ワゴン車1台で運ぶことが可能
写真2■搭乗型の専用コントローラーは、普段から建設機械の操縦に携わっているオペレーターが操作しやすいよう、実際の大型ショベルのコックピットをベースにつくられている。DOKA ROBO 3本体と一緒にして、ワゴン車1台で運ぶことが可能
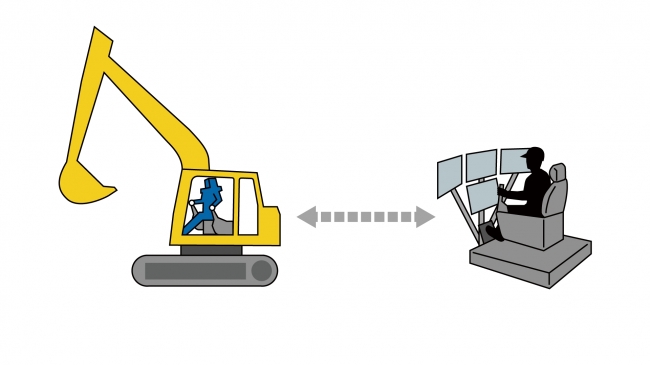 構成図■建設機械にDOKA ROBO 3を搭乗させ、専用コントローラーにオペレーターが搭乗する。オペレーターが専用コントローラーのレバーなどを操作すると、その動きに合わせてDOKA ROBO 3が建設機械のレバーを動かして、建設機械を操縦する
構成図■建設機械にDOKA ROBO 3を搭乗させ、専用コントローラーにオペレーターが搭乗する。オペレーターが専用コントローラーのレバーなどを操作すると、その動きに合わせてDOKA ROBO 3が建設機械のレバーを動かして、建設機械を操縦する
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
