東京ロボティクス、NTTコム社と取り組む人型ロボットの遠隔力制御の動画公開
人間共存ロボットの実現を目指す東京ロボティクス株式会社(東京都新宿区、代表取締役:坂本義弘)は、NTTコミュニケーションズ株式会社との共同開発の成果として、ネットワークを介して人型ロボットを力制御(バイラテラル制御)するデモ動画を公開しました。
本動画では、関節トルクセンサと手先力覚センサを備えたロボットアームを用いたリーダー装置と、腕部と腰部にトルクセンサを搭載した人型ロボットを用いてバイラテラル制御を実現しています。大きな力が出せるロボットにおいて安定したバイラテラル制御を実現するためには、剛性の高いハードウェアとセンシティブなフォース・トルクセンサ、高速かつリアルタイムなモータ間同期、および高速かつ低ジッタのネットワーク環境が必要です。当社は2019年よりNTTコミュニケーションズ株式会社(以下、NTTコム社)のオープンイノベーションプログラムに採択されて以来、同社と共同で遠隔操作ロボット(テレプレゼンスロボット)を開発してきた経緯があり、今回の発表は昨年4月のリリースを補足する技術公開になります。
(2021年4月1日)遠隔ジムトレーニングサービス「テレトレ」を開始!
https://prtimes.jp/main/html/rd/p/000000002.000077249.html
■バイラテラル制御
バイラテラル制御は遠隔操作技術の手法の一つで、操縦者がリーダー装置を動かすことで、フォロワー装置(人型ロボット)を遠隔から操作することができます。リーダー装置から一方的に位置指令を出すだけでなく、フォロワー装置が感じた外力をリーダー装置を経由して操縦者にフォードバックすることができるため、対象物と接触するような作業も位置制御ベースの遠隔操作技術に比べて容易に行うことができます。

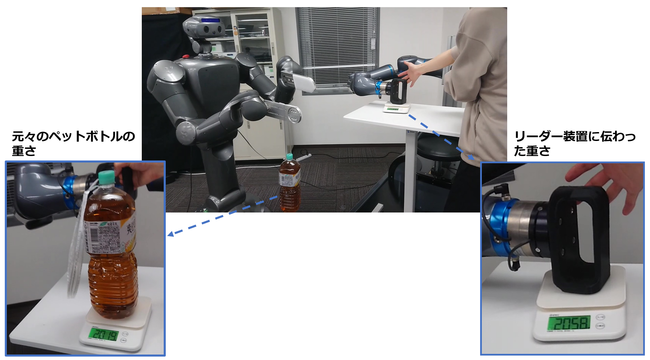
◆力フィードバックの事例
今回使用した2Lペットボトルの重さは2,019グラムですが、バイラテラル制御を用いて力のフィードバックを行うと、リーダー装置にもほぼ同様の重さ(2,058グラム)を伝えることができます。
◆双腕バイラテラル制御
ケース①:箱の双腕把持
双腕でのバイラテラル制御により、箱を潰さず落とさず持つことができます。また、体の前で箱を持ったまま腕を回しても、落とすことはありません。力の感覚をフィードバックしないと目視のみで箱を持つことになるため、箱を落としやすくなります。

ゴムボールのような弾力性の高い対象物であっても、弾力を感じながら巧みに操作することができます。

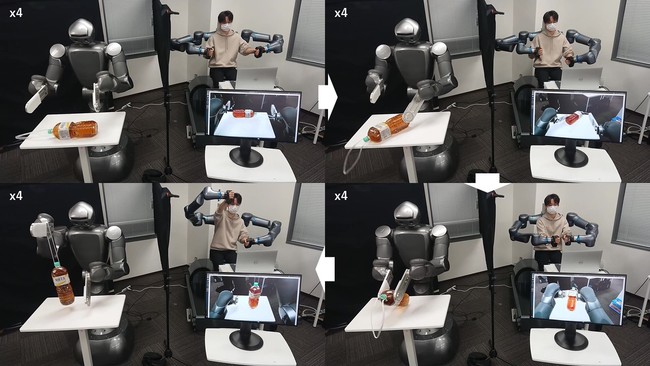
ペットボトルが横向きに置かれている状態であっても、右腕と左腕の力フィードバックを頼りに、ペットボトルの向きを変え、縦に置き直して、手首に紐をかけることができます。
穴の空いた円盤を棒に挿し込む動作において、バイラテラル制御を用いることで、穴が棒に引っかかる感覚を操縦者が感じ取ることができるため、このような繊細な作業であっても比較的容易に行うことができます。

■今後の展望
災害救助、危険地作業、遠隔医療、遠隔就労、障がい者の社会参加等のアプリケーションの実現に向け、引き続きロボットの品質向上と安定したマルチモーダル情報伝送(視覚、聴覚、力覚のネットワーク伝送)の研究開発を進めて参ります。
■東京ロボティクスについて
東京ロボティクスは、『人間共存ロボット』の実現を目指す早稲田大学発のロボティクススタートアップです。私たちが目指す『人間共存ロボット』とは、製造現場だけでなく私生活を含めた様々な場面で、人に寄り添うロボットを指しております。創業間もない時期は、研究用のロボットアームや双腕ロボットの製造販売を中心に行って参りました。近年は、これまでの研究成果を更に前進させた力制御可能な最先端人型ロボットを開発するとともに、人間共存ロボット実現に必要な要素技術として、ビジョン技術(3次元カメラ)や画像認識・機械学習、遠隔操作など研究領域を広げております。また、研究開発にとどまらず社会実装する事業も加速しており、多くの大手企業様と共同開発・現場実証を進めております。

■求人情報
東京ロボティクスでは、一緒に人間共存ロボットを開発する仲間(正社員・インターン)を募集中です。
以下問い合わせ先、若しくはWantedlyよりご応募ください。
問い合わせ先:recruit@robotics.tokyo
Wantedly:https://www.wantedly.com/companies/robotics

すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- 電子部品・半導体・電気機器AV機器
- ダウンロード
