Datatangは自動運転の開発をサポートする『4Dアノテーションサービス』の提供を開始します。
鳥瞰図Bird's Eye View(BEVを略称する)は、地図の技法および図法の一種で、上空から斜めに見下ろしたような形式のものをいいます。自動運転において、車の鳥瞰図は複数の車載センサーから収集したデータが、AIモデルの整理演算を経って生成されたものとなります。複数のセンサー情報を1つの視点で表示し、誤差の積み重ねが回避でき、自動運転中の複数のセンサーデータの融合判断という難題が解決できます。
BEV空間において、座標系は同一のため、時系列と融合して4D空間を形成することができます。しかしながら、点群の量が膨大すぎるため、従来の3Dアノテーション技術は現在のアノテーションニーズに負えなくなり、BEV向けの4Dアノテーション技術はますます注目されつつあります。
Part 1:BEVに基づく4Dアノテーション技術
4D‐BEVアノテーション技術は3Dに第4の次元、すなわち時系列を入れました。この技術に基づき、アノテーターは車両、歩行者、交通標識などの静的な物体をアノテーションし、それらの位置、大きさなどの情報を記録し、同時に時間軸で物体の現れる時間を記録します。これによって、AIアルゴリズムはより正確に物体の移動軌跡を追跡し、自動運転中に安全な判断をだせるようになります。
お客様により早く、低コストで大量高品質な4D-BEVデータを構築するため、Datatangは独自のアノテーションソリューションをご提供します。
Datatangの4Dアノテーションツールは3D区間+時系列の次元でアノテーションを行います。レーザーレーダー、ミリ波レーダー、カメラなどの設備でとったデータを全て対応し、キャリブレーションやデータ融合機能も付いています。そして、予測識別技術をアノテーションツールに入れ、作業のスピードと品質をアップさせます。
Datatangのアノテーションツール:
Part 2:Datatangのアノテーションツールの目玉
1.4D点群アノテーションモジュールは点群データをブラウザ上で扱えるポイントクラウドビューアシステムPotreeを採用し、カメラの位置、点群とカメラの距離、点群の密度等のパラメータからOctreeの解像度をコントロールし、LOD(Level of Detail)の機能を実現できます。
2.データセットからマッピングパラメータを取得し、パラメータ偏差を避けます。4Dオリジナルの点群データにはclipごとに 1 つの点群しかありませんが、マルチフレームカメラに対応するため、Datatangのツールはバックグラウンドからマッピングパラメータを取得し、1フレームに1つのパラメータに対応させ、マッピングの精度を高められます。
3.異なる対象に点群の表示色をカスタマイズ設定でき、点群目標を正確に判別できます。
4.Prelord機能でアノテーションとデータの読み込みを同時実行し、作業の待ち時間を最小にしてアノテーション効率を高められます。
5.予測識別エンジンを搭載しており、目標の自動識別、目標の追跡ができます。作業の一部はアノテーターが自動アノテーション結果を検証するだけ終わり、作業コストを抑えらます。
Part 3:実例
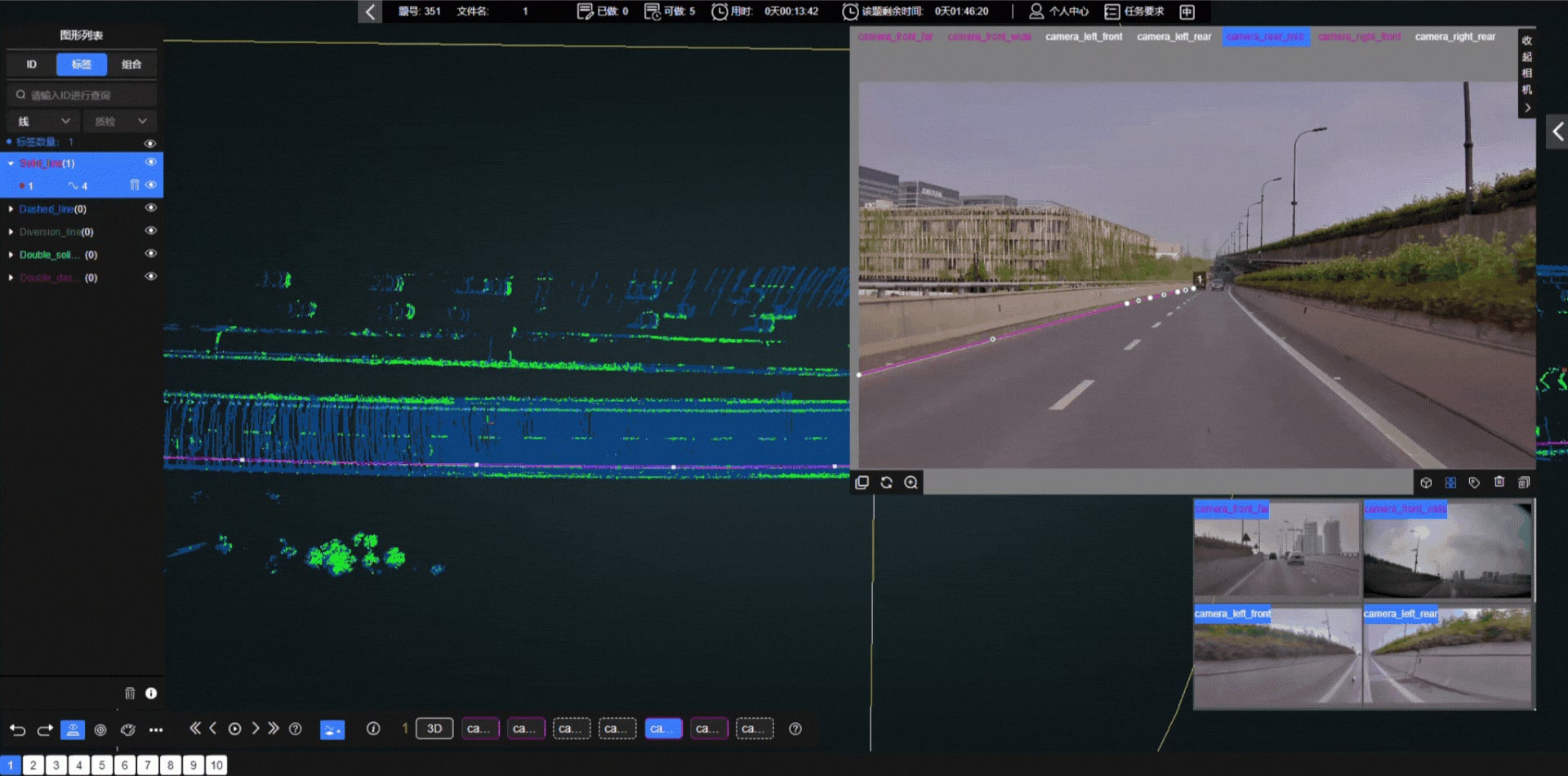
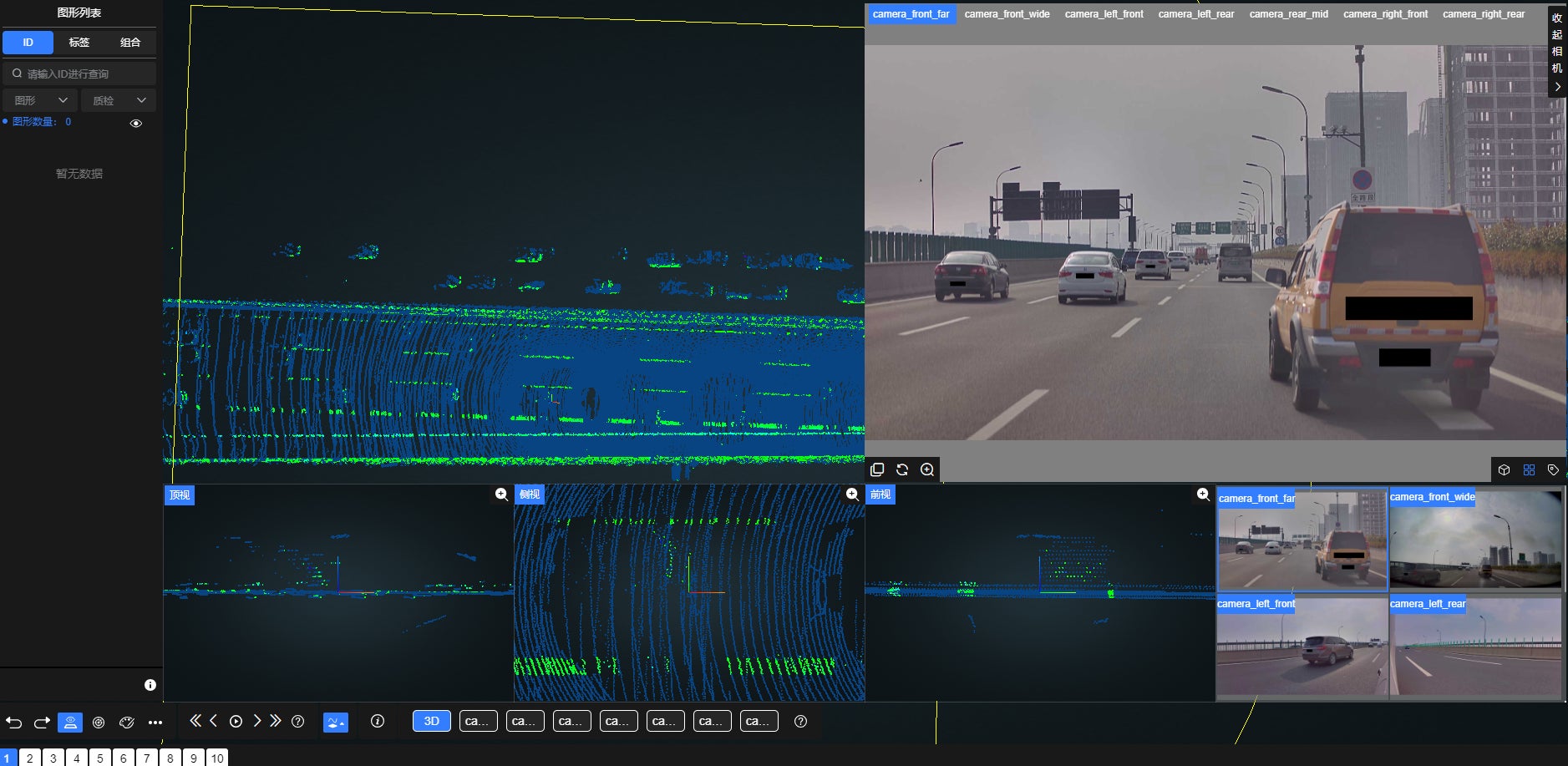
車道のアノテーション
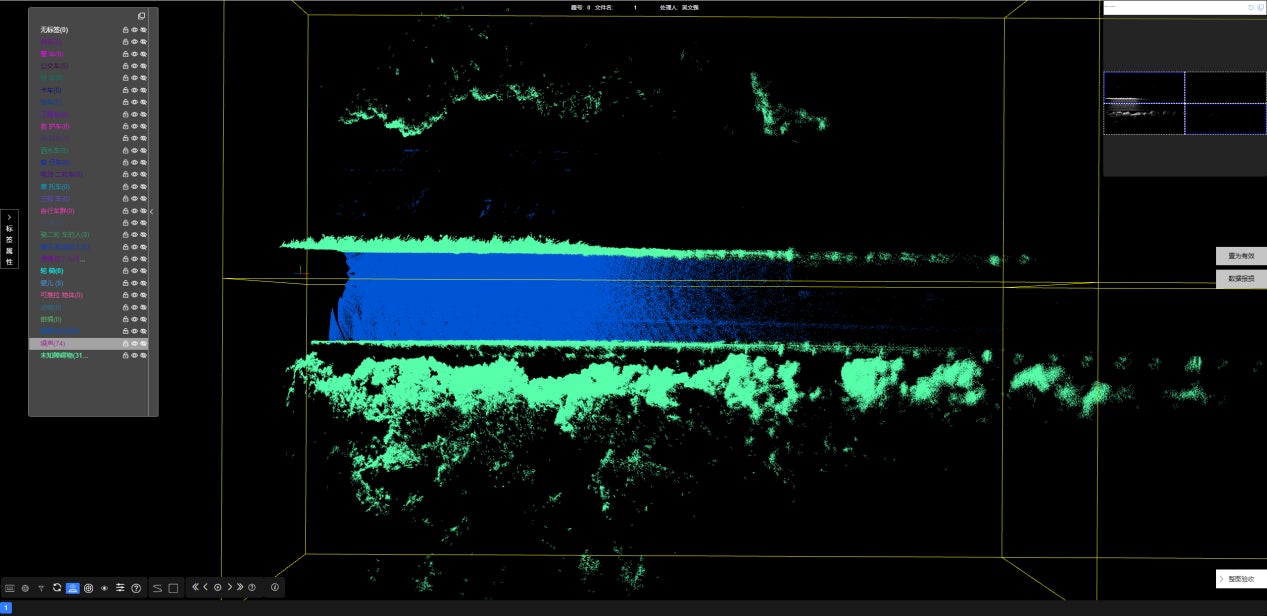
4D点群セグメンテーション
Datatangは長年にわたり、国内外の自動運転関連の企業様から依頼を受けており、3D、4Dアノテーション経験を豊富に蓄積してきました。そして、その経験を自社独自のアノテーションツールに反映し、より高品質、低コストで学習データを作れるよう、努力、進化してまいりたいと思います。
アノテーションのニーズがございましたら、是非お任せください。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- アプリケーション・セキュリティシステム・Webサイト・アプリ開発
- ダウンロード
