新方式の量子コンピュータを実現
ー世界に先駆けて汎用型光量子計算プラットフォームが始動ー
概要
理化学研究所(理研)量子コンピュータ研究センター光量子計算研究チームの古澤明チームリーダー(量子コンピュータ研究センター副センター長、東京大学大学院工学系研究科教授)、光量子制御研究チームの米澤英宏チームリーダー、日本電信電話株式会社(NTT)、株式会社Fixstars Amplifyの平岡卓爾代表取締役社長CEOらの共同研究グループは、新方式の量子コンピュータ[1]の開発に成功しました。これは世界に先駆けた汎用型光量子計算のためのプラットフォームとなります。
量子コンピュータは量子力学の原理を計算に利用することで、さまざまな問題が超高速で解けると期待され、世界中で激しい開発競争が行われています。理研量子コンピュータ研究センターでも2023年に超伝導方式の量子コンピュータを公開しました。
今回、共同研究グループは、光方式[2]による新型量子コンピュータを開発しました。光方式では、従来の量子コンピュータと比べて高速かつ大規模な量子計算が可能になると期待されており、これまで困難であった計算課題の解決など、量子コンピュータ研究を新たなステージに進めることができます。
今回開発した光量子コンピュータは、インターネットを介したクラウドシステムから利用可能となっています。当面は共同研究契約を通じた利用となりますが、今後、国内の量子計算プラットフォームの利用拡大、量子コンピュータのユースケース(活用法)の創出、国内量子産業の発展と国際競争力の向上に寄与すると期待されます。
背景
量子コンピュータは世界に革新をもたらす新技術と期待されています。量子力学の原理に立脚し、量子もつれ[3]や量子重ね合わせ[3]といった量子の世界の特徴を巧妙に扱うことで、全く新しい方式のコンピュータが実現できます。量子コンピュータの概念は1980年代に提唱され、その後1990年代に量子コンピュータ特有のアルゴリズムが発見されたことで注目を集めました。2000年代以降、その実現に向けて世界中で基礎研究と応用研究が行われてきました。近年、小規模な量子コンピュータが実現されクラウドベースで提供されるようになり、理研量子コンピュータ研究センターでも2023年に64量子ビットの超伝導型量子コンピュータを整備しクラウド公開しました。
量子コンピュータの実現方式には、超伝導、中性原子、イオン、シリコン、光など、多様な候補があり熾烈(しれつ)な競争が行われています。この中で、光方式の量子コンピュータは、以下のことから非常に有望な候補の一つと考えられています。
-
計算のクロック周波数(動作周波数)を数百テラヘルツ(THz、1THzは1兆ヘルツ)という光の周波数まで原理的には高められる
-
他方式と違いほぼ室温動作が可能
-
光多重化技術[4]によりコンパクトなセットアップで大規模計算が可能
-
光通信と親和性が高く量子コンピュータネットワークの構築が容易と考えられる
特に光通信で培われた超高速光技術が、光量子コンピュータにとって非常に有用なアセット(資源)であり大きなアドバンテージになります。
古澤チームリーダーは20年以上にわたり、光量子コンピュータ研究のトップランナーであり、その間に理研と東京大学で培ったさまざまな技術が今回の光量子コンピュータに結実しました。基幹部である超広帯域量子光生成デバイスは、NTT先端集積デバイス研究所によって長く研究されている超高速通信用光デバイスを基に開発した量子光源が提供され、クラウドシステムは株式会社Fixstars Amplifyの協力により整備されました。
研究手法と成果
今回整備された光量子コンピュータは、時間分割多重化手法を用いた測定誘起型[5]のアナログタイプの量子コンピュータです。ここでアナログタイプの量子コンピュータとは、ビットではなく連続的な量で表される量子を基にした連続量(アナログ)量子コンピュータ[6]を指します。具体的には光波の振幅値[7]が情報のキャリア(搬送媒体)となります。これに時間分割多重と測定誘起型の手法を組み合わせることにより、大規模かつ効率的な量子コンピュータが実現します。
測定誘起型量子コンピュータでは、量子テレポーテーションの繰り返しによって計算が実行されます。これは2013年に古澤チームリーダーらのグループにより明らかにされました。量子テレポーテーションは、量子の情報を量子もつれと呼ばれる量子的な相関を介して遠隔地に転送する手法であり、1998年に古澤チームリーダーらによって世界で初めて条件なしで実験的に実証されました。この量子テレポーテーションの概念図が図1です。量子テレポーテーションは、量子操作として考えると一つの量子状態を入力しそのまま出力される恒等操作でしかありませんが、測定の部分に変更を加える(測定基底の変更[8]を行う)ことで、恒等操作ではないさまざまな量子操作を実現することができます。測定誘起型の手法では、まず大規模な量子もつれを生成し、それに対して測定を介して量子テレポーテーションを繰り返し実行し、マルチステップの量子操作を実現します。
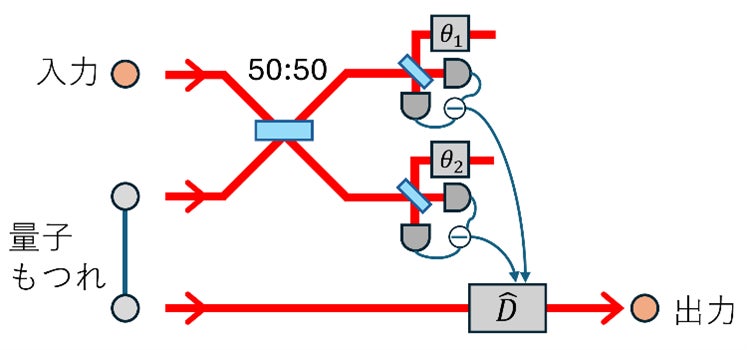
量子テレポーテーションは、入力の量子が持つ情報を、量子もつれを介して出力へと伝送する手法である。入力と量子もつれは50:50(50%反射、50%透過)のビームスプリッター(青の長方形)で重ね合わされ、その後測定される。測定値は電気信号として出力側に伝送され、量子操作が実行されることで、量子テレポーテーションが完了する。ここで、測定基底(θ1およびθ2)の変更を行うことで、入力に対して多様な量子操作を実現できる。測定誘起型量子コンピュータでは、量子もつれを大規模に生成して、その測定を介して量子テレポーテーションを繰り返し実行する。
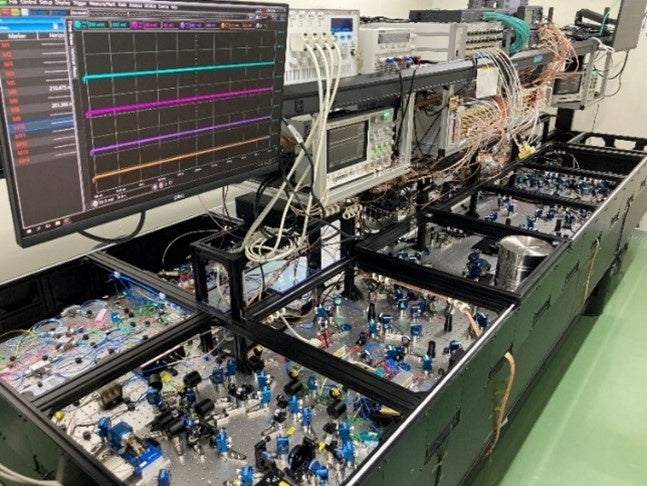
測定誘起型量子コンピュータでは、大規模な量子もつれの生成が重要です。そのために、光の進行波としての性質と時間分割多重化手法を活用します。図2は光量子コンピュータ実機の光学装置の概略図です。この構成は2016年のAlexanderとMenicucciによる提案に基づきます。
まず四つの量子リソースデバイスA~Dがあります。これは光パラメトリック増幅器と呼ばれるデバイスで、量子的性質を持つ光、スクイーズド光[9]を生成します。スクイーズド光とは、光の持つ量子揺らぎが圧搾(スクイーズ)された光で、量子もつれを生成するために必要です。このスクイーズド光が連続的に進行波として生成されますが、これを時間的に区切って光パルスとして扱います。
二つのスクイーズド光パルスが50%反射ビームスプリッター[10]で重ね合わされることによって、A-B間およびC-D間にそれぞれ2者間量子もつれが連続的に生成されます。次に、B、Dの光路にそれぞれ光パルス一つ分、光パルスN個分の遅延を与えます。これにより、2者間量子もつれが異なる時間に分配されます。同時刻に存在する四つの光パルスをワンセットとしてマクロノードと呼びます。
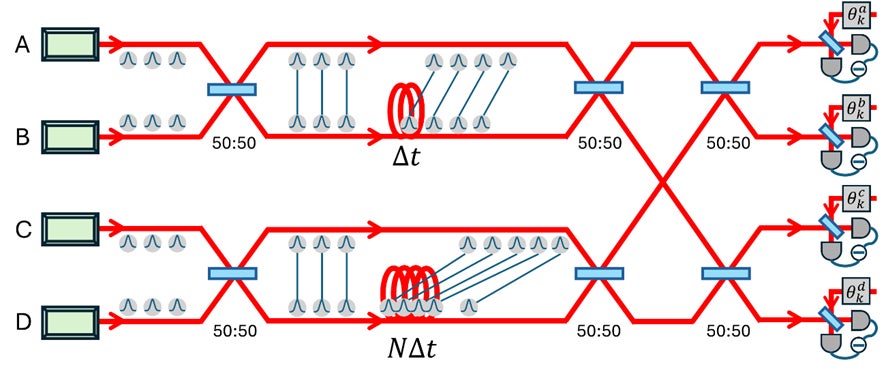
A、B、C、Dは光パラメトリック増幅器を表す。このデバイスから、量子揺らぎが圧搾された光(スクイーズド光)が出射される。これを時間Δtで区切り、光パルスとして扱う。二つの光パルスが50%反射ビームスプリッター(青の長方形)で重ね合わされると、A-B間、C-D間にそれぞれ2者間量子もつれが次々と生成される。その後、Bの光路では光パルス一つ分(Δt)、Dの光路では光パルスN個分(NΔt)をそれぞれ遅延させる。その結果、2者間量子もつれが異なる時間に分配される。これを複数の50%反射ビームスプリッターで重ね合わせてから測定することで、テレポーテーションベースの量子操作が実行される。量子操作に応じて、光パルスごと(kはパルスの番号)に測定基底を変更する。
光遅延がパルスN個分であることからマクロノードが周期Nの構造を持ちます。このため、並べ替えを行うと図3(a)のように量子もつれが時間的に格子上の広がりを持つ構造であることが分かります。この格子状に広がった量子もつれが光量子コンピュータの計算リソースとなります。特に、この量子もつれのサイズは、光遅延路で決まるNと経過時間で決まるため、時間をかけることでいくらでも大きな量子リソースが利用できます。
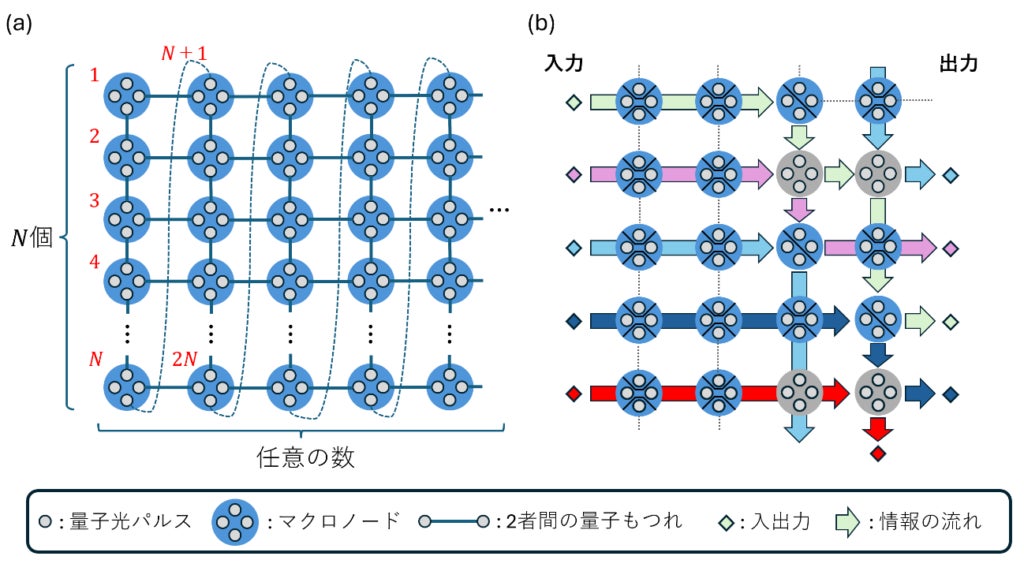
(a)マクロノードを並び替えると、量子もつれが時間的に格子状に広がっている(多重化されている)ことが分かる。これが量子コンピュータの計算のリソースになる。量子もつれのサイズ、すなわち計算のリソースは、時間をかければかけるほど大きくなる。
(b)各マクロノードに対してテレポーテーションベースの量子操作を行うことで、多入力に対して多段階の量子操作を実行する。
実際の計算はマクロノードを形成する四つの光パルスに対して、非局所的な測定(複数の50%反射ビームスプリッターによる重ね合わせと測定)を行うことで、テレポーテーションベースの演算を行います(図2)。各マクロノードに対してテレポーテーションベースの量子操作を行うことで、多入力に対して多段階の量子操作を実行します(図3(b))。今回の光量子コンピュータでは約100個の連続量入力に対し任意ステップ数の線形演算が可能となっています。
図4左は基幹部であるNTT先端集積デバイス研究所作製の光パラメトリック増幅器です。周期分極反転ニオブ酸リチウム導波路であり、極めて広い帯域(約6THz)と、高いスクイージングレベル(最大8デシベル(dB)程度)を両立しています。光のパルス幅は時間的には10ナノ秒(1ナノ秒は10億分の1秒)、空間的には3m相当に設定され、これは100メガヘルツ(MHz、1MHzは100万ヘルツ)のクロック周波数に対応します。このパルス幅は、現状の光測定器とそれにつながる電子機器の帯域で決定されています。
図4右は光測定器のコントロールと測定値のデータ収集を行うプログラマブルロジックデバイス[11]です。このデバイスは100MHzの周期で電気パルスを生成し光の測定基底を高速で操作します。これにより所定の量子操作を各マクロノードに行うことになります。


(左)NTT先端集積デバイス研究所作製の光パラメトリック増幅器。
(右)光測定器のコントロールと測定値のデータ収集を行うプログラマブルロジックデバイス。
本光量子コンピュータはクラウドベースの量子コンピュータであり、図5のように、理研内にある光量子コンピュータ実機がクラウドと接続されています。ユーザーは量子回路をデザインしクラウドへ送信します。クラウド上で量子回路は実機パラメータへ変換され、光量子コンピュータ実機へと送られます。ユーザーは実行結果をクラウド経由で受け取ります。
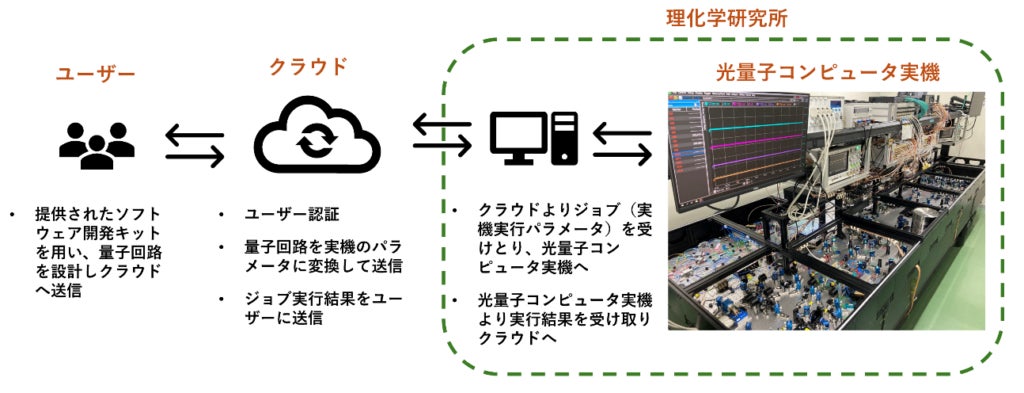
ユーザーは量子回路をデザインしクラウドへ送信する。クラウド上で量子回路は実機パラメータへ変換され、光量子コンピュータ実機へと送られ、量子操作を実行する。ユーザーは実行結果をクラウド経由で受け取る。
本光量子コンピュータでは、連続変数の線形変換が可能であることにより連続量の最適化問題などへの応用や、非線形変換の機能を導入することでニューラルネットワークなどへの応用も期待されます。
今後の期待
今回、光量子コンピュータとそのクラウドシステムを実現しました。これにより、光量子コンピュータの開発と、金融・医療・材料科学・機械学習・最適化問題などのユースケース探索が大きく進展することが期待されます。
今後、光量子コンピュータを真に実用的なものとするために、さらなる多入力化、超高速化、非線形操作の導入、アプリケーションの探索、といった課題を解決する予定です。また、将来的には誤り耐性のある大規模汎用量子計算機の実現を探求していきます。
補足説明
[1] 量子コンピュータ
量子力学の原理を利用した、現在の(古典)コンピュータとは異なる方式で動くコンピュータ。古典コンピュータとは動作原理が異なるため、特定の問題を超高速で解けることが知られている。例えば、量子系の効率的なシミュレーションや素因数分解などの問題が高速に解けると期待されている。
[2] 光方式
従来の古典コンピュータでは、電気信号によって表される情報が半導体プロセッサによって処理される。光方式では、光が情報の担い手となる。光の光子数、偏光、振幅などさまざまな光の物理量を用いる方式がある。
[3] 量子もつれ、量子重ね合わせ
量子力学の特徴的な現象の中でも、特に量子コンピュータで重要になるもの。量子もつれとは、量子の間に存在し得る非局所的な相関であり、量子重ね合わせとは、量子が、異なる状態を同時に取ることを指す。どちらも日常感覚とは相いれない量子の世界特有の現象である。
[4] 光多重化技術
複数の光信号を一つの伝送路で同時に送信する技術。異なる波長の光に異なるデータを割り当てる波長分割多重、時間を分割して異なる時間に異なるデータを割り当てる時間分割多重などがある。
[5] 測定誘起型
測定誘起型の量子コンピュータは2001年にRaussendorfらによって提案され、2006年にMenicucciらによってアナログ量子コンピュータへ拡張された。2013年には、古澤チームリーダーらのグループが、測定誘起型量子コンピュータに向けた大規模量子もつれの生成に成功し、さらに2019年に汎用性を持つ大規模量子もつれの生成、2021年に簡単な量子計算のデモンストレーションにそれぞれ成功した。今回の光量子コンピュータはそれらの成果に基づいたものであり、より汎用的かつ大規模な量子計算が可能となっている。
[6] 連続量(アナログ)量子コンピュータ
一般的な量子ビットベースの量子コンピュータに対して、連続量量子コンピュータでは、連続的な変数(アナログ)に対して演算を行う。連続的な変数を表すのに、「位置」や「運動量」またはそれに対応する物理量が用いられる。
[7] 光波の振幅値
光は電磁場であり波として空間を伝わる。電磁場の振幅は量子スケールで見ると、量子力学に由来する揺らぎを持っている。さらに、電磁場は位相が90度異なる二つの波に分解され、それぞれの振幅値が、「位置」と「運動量」に対応する関係を持っている。このため、この二つの波の振幅値を光の量子力学的性質を表すのに用いることができる。
[8] 測定基底の変更
光波のどの位相の振幅を測定するかを変更すること。光の振幅測定には、ホモダイン測定と呼ばれる、強度の高い参照光と強度の極めて弱い量子光との間での干渉測定が使われる。この参照光の位相を変更することで、量子光のどの位相の振幅を測定するかを変更することができ、すなわち測定基底の変更ができる。
[9] スクイーズド光
光波を90度位相の異なる二つの波に分解したとき、それぞれの波の振幅は量子揺らぎを持つ。スクイーズド光とは、一方の波の振幅の量子揺らぎを圧搾(スクイーズ)し、もう一方の波の振幅の量子揺らぎを増幅した光のことをいう。量子力学の原理により、この二つの振幅の量子揺らぎを同時に圧搾することはできない。
[10] ビームスプリッター
光を部分的に反射、透過する光学素子。量子的な光を入力することで量子もつれを生成することができる。量子光学における基本素子。
[11] プログラマブルロジックデバイス
デジタル回路をフレキシブルに設計・変更できる半導体デバイス。測定誘起型量子コンピュータを高速に実行するために高速なデジタル処理が必要となる。本研究では、Field Programmable Gate Array(FPGA)と呼ばれるデバイスを用いた。
共同研究グループ
理化学研究所 量子コンピュータ研究センター
光量子計算研究チーム
チームリーダー 古澤 明 (フルサワ・アキラ)
(量子コンピュータ研究センター 副センター長、東京大学大学院工学系研究科教授)
特別研究員 阪口淳史 (サカグチ・アツシ)
研究員 吉川純一 (ヨシカワ・ジュンイチ)
特別研究員 陳 奕如 (チェン・イリュ)
光量子制御研究チーム
チームリーダー 米澤英宏 (ヨネザワ・ヒデヒロ)
上級研究員 横山翔竜 (ヨコヤマ・ショウタ)
東京大学大学院工学系研究科 物理工学専攻
助教 アサバナント・ワリット(Asavanant Warit)
(量子コンピュータ研究センター 光量子計算研究チーム 客員研究員)
助教(研究当時) 高瀬 寛 (タカセ・カン)
(量子コンピュータ研究センター 光量子計算研究チーム 客員研究員)
博士課程学生 長吉博成 (ナガヨシ・ヒロナリ)
日本電信電話株式会社 NTT先端集積デバイス研究所
上席特別研究員 橋本俊和 (ハシモト・トシカズ)
特別研究員 梅木毅伺 (ウメキ・タケシ)
准特別研究員 柏﨑貴大 (カシワザキ・タカヒロ)
研究主任 井上飛鳥 (イノウエ・アスカ)
株式会社Fixstars Amplify
代表取締役社長CEO 平岡卓爾 (ヒラオカ・タクジ)
研究支援
本研究は科学技術振興機構(JST)ムーンショット型研究開発事業ムーンショット目標6「2050年までに、経済・産業・安全保障を飛躍的に発展させる誤り耐性型汎用量子コンピュータを実現(プログラムディレクター:北川勝浩)」の研究開発プロジェクト「誤り耐性型大規模汎用光量子コンピュータの研究開発(プロジェクトマネージャー:古澤明)」の助成を受けて行われました。

株式会社Fixstars Amplify
広報担当
Tel: 03-6420-0751
Email: press@fixstars.com
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- その他
- ビジネスカテゴリ
- 電子部品・半導体・電気機器ネットサービス
- ダウンロード