セック、小型月着陸実証機「SLIM」搭載の変形型月面ロボットのソフトウェアおよびX線分光撮像衛星「XRISM」向け観測データベースシステムの開発に協力
SLIMおよびXRISMは、H-IIAロケット47号機に搭載され、2023年9月7日に種子島宇宙センターから打ち上げられました。
SORA-Qは国立研究開発法人宇宙航空研究開発機構(JAXA)、株式会社タカラトミー等が開発した変形型月面ロボットです。月面低重力環境下における超小型ロボットの探査技術の実証を目的とし、JAXAの宇宙探査イノベーションハブとして初めて月面での実証を行うものです。
SORA-Qは、SLIMの月着陸直前にもう一台のロボットLEV-1とともに放出されます。その後、月面を移動しながら、搭載されたカメラを利用して写真を撮影するとともに、走行時のデータを取得します。さらに、LEV-1を経由して写真や走行データを地球へと送信します。当社は、これら一連の動作を状況判断しながら自律的に行うソフトウェアの一部を開発しました。
■変形型月面ロボット「SORA-Q(ソラキュー)」
 クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学
クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学
■SORA-Qのミッション
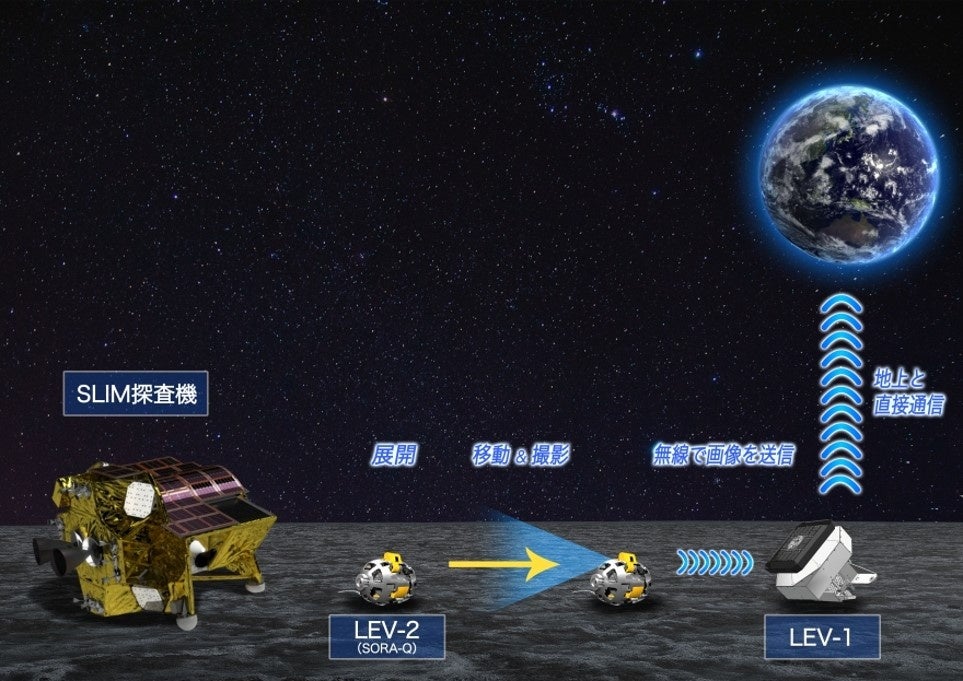 クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学
クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学
また、ODBはXRISMの科学運用を支える重要な地上システムの一つで、XRISMで天体を観測する際に、研究者からの観測の要求、XRISMの観測の計画、観測した結果などを含む一連の天体観測の状況を管理する役割を担います。
当社は今まで培った宇宙機搭載ソフトウェア開発の知見、ロボットソフトウェア開発の知見を融合し、今後も月面利用や月開発に貢献してまいります。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像