トライアートとトヨタ九州、異なるメーカーの無人搬送車が自律的に交差する「分散型優先走行制御システム」の構築に成功
株式会社トライアート(本社:福岡県飯塚市、代表取締役:今津 研太郎、以下トライアート)とトヨタ自動車九州株式会社(本社:福岡県宮若市、代表取締役社長:永田 理、以下トヨタ九州)は、レクサスを製造するトヨタ九州宮田工場の屋外で用いる長距離無人搬送車において、参加する端末を搭載した車両などが環状につながり直接通信する「リングネットワーク」を形成し、互いに安全性確認を行う優先走行制御システムの運用を開始します。屋外長距離無人搬送車の動向監視、交差点における優先走行制御、歩行者との間の安全性確認までを、同一のシステムで運用する計画です。

トライアートはこのたび、複数メーカーのAGVがそれぞれのデータフォーマットや通信仕様で稼働しているトヨタ九州の宮田工場を想定し、車両同士が交差点での優先走行を自律的に判断する「優先走行制御システム」の開発に成功しました。2022年1月から、同様のシステムを用い宮田工場の一部の区間で屋外を走行する長距離無人搬送車の動向監視の運用を開始する予定です。
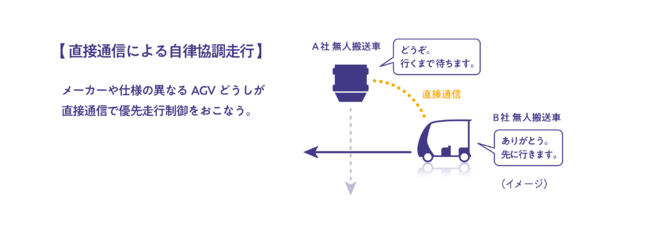
これらは異なるメーカーのAGV同士がインフラレスで直接通信する対話システムで、各メーカーの車両や歩行者の端末、将来的には道路設備などが持つ仕様の差異を吸収しながら自律協調することを可能にする、画期的なアーキテクチャです。このしくみは、主に以下の2つの独自開発によって実現しています。
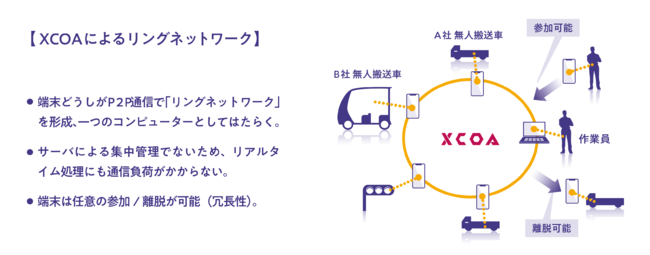
【1】各種端末が参加/離脱可能な、リングネットワークを構成する
トライアート独自の分散コンピューティング技術『XCOA(クロスコア)*』のエージェントを各種端末(車載スマートフォン、作業員スマートフォン、管理者PCなど)に搭載し、端末間直接通信(P2P通信)でつながる「リングネットワーク」を形成します。リングはそれ自体が自律したネットワークで、さらに今回のような「優先走行判定ロジック」などのプログラムを実行する一つのコンピューターとして作用するため、サーバによる集中監視/制御と異なり、リアルタイム処理や継続処理にも通信負荷がかかりません。また、端末の任意の参加・離脱時にも、通信が保たれる冗長性を有しています。
【2】仕様の異なる機器との連携機能を構築する
リングネットワーク上で処理された結果(停止命令など)を、AGV車両やAGV管理機器などにメッセージングし、各デバイスの制御(車両にブレーキを掛けるなど)を実現します。メッセージングする対象によってはPLC(機械制御装置)や、ROS(ロボットOS)マシンを経由します。各社仕様によるデータフォーマットの違い、通信仕様の違いなどはここで共通化(翻訳)を施し、判定はリングネットワーク上の共通ロジックに委ねることで、その差異を吸収します。

このしくみの基盤であるリングネットワークは、P2P通信をベースとしているため、サーバに負荷が集中することで生じるリスクやコストが発生しません。参加する端末の数や役割によってリングを増やしながら連携を拡張すれば、スケールの拡大とともに分散コンピューティングの強みはさらに発揮されるでしょう。また、統一規格のためのソフトウェア開発・維持の社会的コストが軽減でき、用途や環境によって柔軟な設計ができる点もメリットです。
 (上)リングネットワーク上の参加端末の動向を確認できる管理画面 (下)バッテリー情報など各端末のステータスをリアルタイムに把握できる
(上)リングネットワーク上の参加端末の動向を確認できる管理画面 (下)バッテリー情報など各端末のステータスをリアルタイムに把握できる
新しい社会基盤が導入されるとき、これまでのしくみを全て刷新する中央集約的な方法がある一方で、既存のしくみを連携させることで性能を担保し、同時に情報や権限の過集中を生じさせない方法を検討することは、これからの情報技術を考えるうえで重要な視点です。トライアートは、自社開発の技術を応用しながらさまざまな分野でその可能性を追究し、またトヨタ九州は、現場の実課題から生まれた新しい生産技術の汎用化に率先して取り組んでいます。当システムも、今回の実用化を足掛かりに、これからの社会に実装する価値ある技術へ発展させるべく研究開発を継続してまいります。
*分散コンピューティング技術『XCOA(クロスコア )』= Cross Computing Architecture(クロスコンピューティングアーキテクチャ)。『XCOA』は、株式会社トライアートの登録商標、独自設計技術(日本国特許第6427697号・6427702号 [国際特許出願中] )です。
【本件に関するお問い合わせ】
▶︎ 株式会社TRIART お問い合わせ窓口
▶︎ https://triart.co.jp/contactform
【会社情報1】
社名:株式会社 TRIART( よみ:トライアート )
英名:TRIART,INC.
本社所在地:〒820-8517 福岡県飯塚市川津 680 番地 41CIRD
支社:福岡県博多区
代表者:今津 研太郎
事業内容:IT ソリューション事業 / IT コンサルティング事業 / インターネットメディア事業 / 情報デザイン事業
公式サイト:https://triart.co.jp/
【会社情報2】
社名:トヨタ自動車九州株式会社
本社(宮田工場)所在地:
〒823-0015 福岡県宮若市上有木 1 番地
代表者:永田 理
事業内容:自動車及びその部品の製造
公式サイト:https://www.toyota-kyushu.com
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- システム・Webサイト・アプリ開発アプリケーション・セキュリティ
- ダウンロード
