【生成AI×産業用ロボット】生成AIの「目的特化+最小限」利用による新方式を学会で発表
産業用ロボットの導入容易性と優れた性能の両立を目指す着実な進展
株式会社チトセロボティクス(本社:東京都文京区、代表取締役社長:西田亮介、以下「当社」)は、生成AIを活用した産業用ロボットの動作指示システムにおいて、必要な機能を限定してAIで担うという設計思想により、精度と処理速度の両立を確認できる実証段階に達しました。この研究成果について、第43回日本ロボット学会学術講演会で発表を行います。
■背景と開発動機
前回プレスリリースでは、LLM/VLMを活用した「日本語と画像による自然言語動作指示システム」の研究開始をお知らせしました。
【生成AI×産業用ロボット】言葉と画像でロボットに指示する「自然言語動作指示システム」の研究を開始(2025年6月17日 11時00分)
プログラミング不要という点から、大きな期待を寄せていただきましたが、一方で「完全なAI依存」には信頼性や導入のハードルという課題も存在します。
これを踏まえ、当社は必要最小限のAI活用にとどめ、使うべき場面で効果的に機能を分担させるという新たなアプローチを模索しました。
■研究の革新ポイント
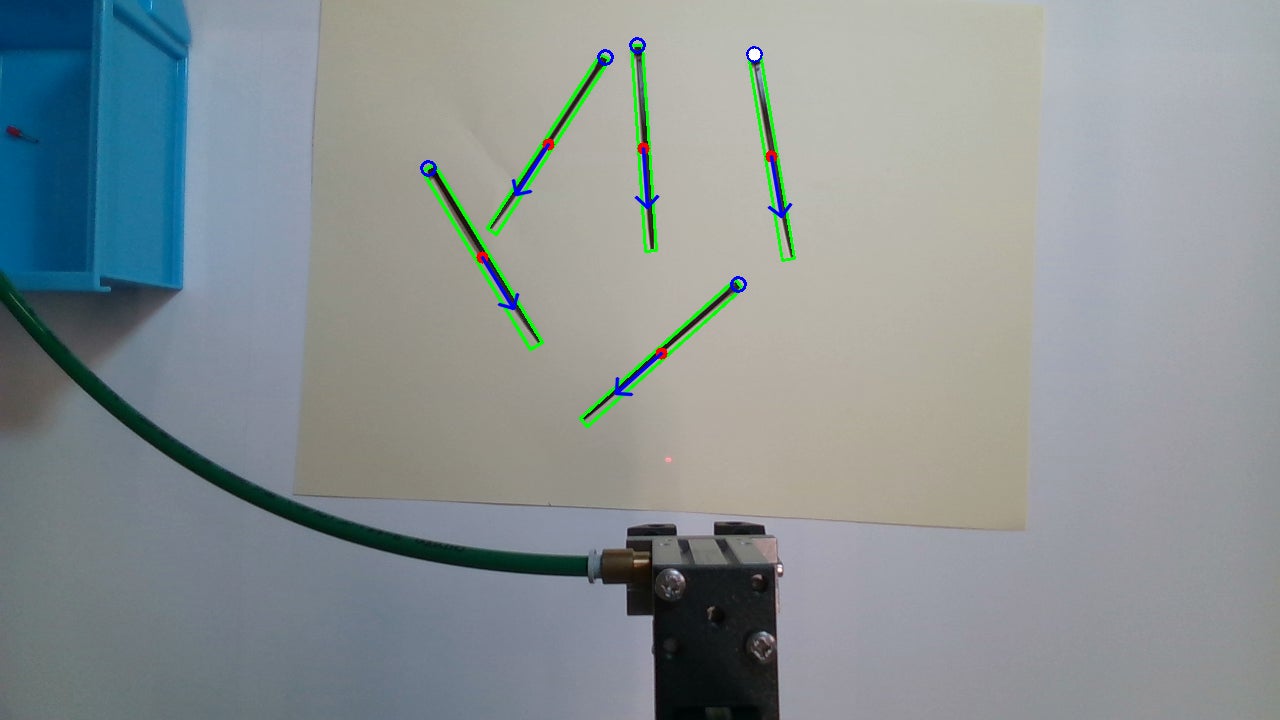
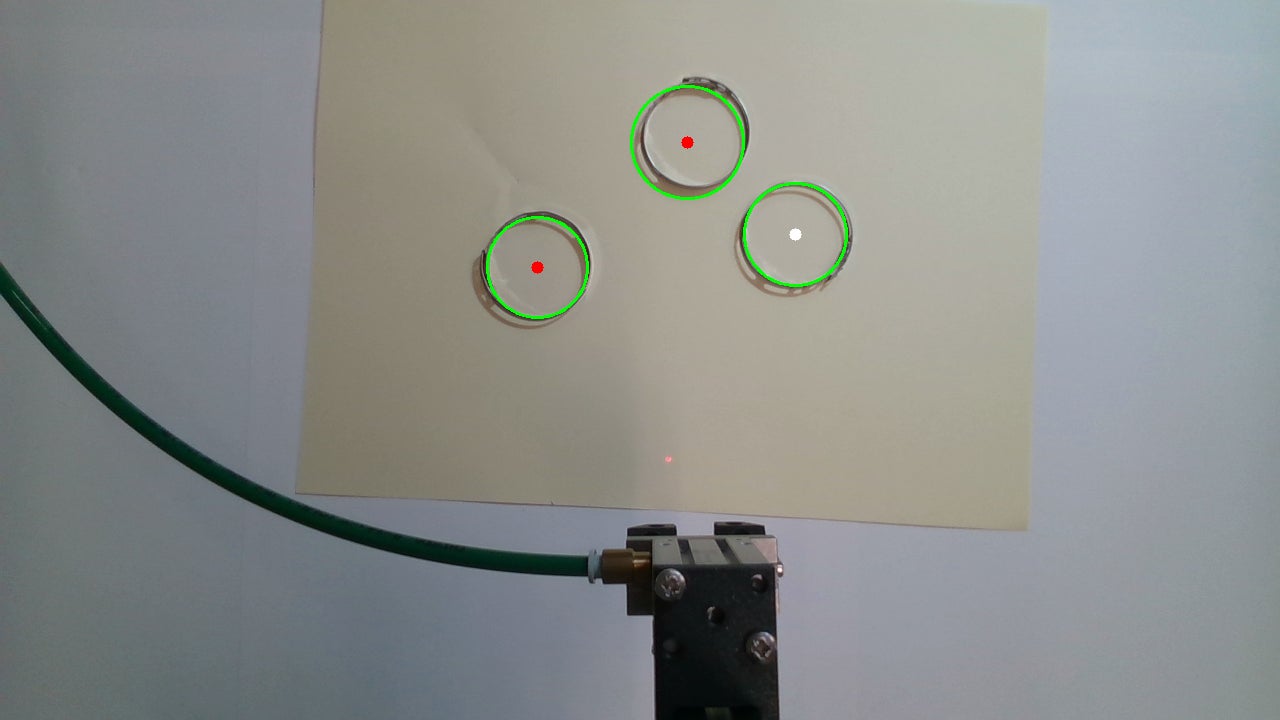
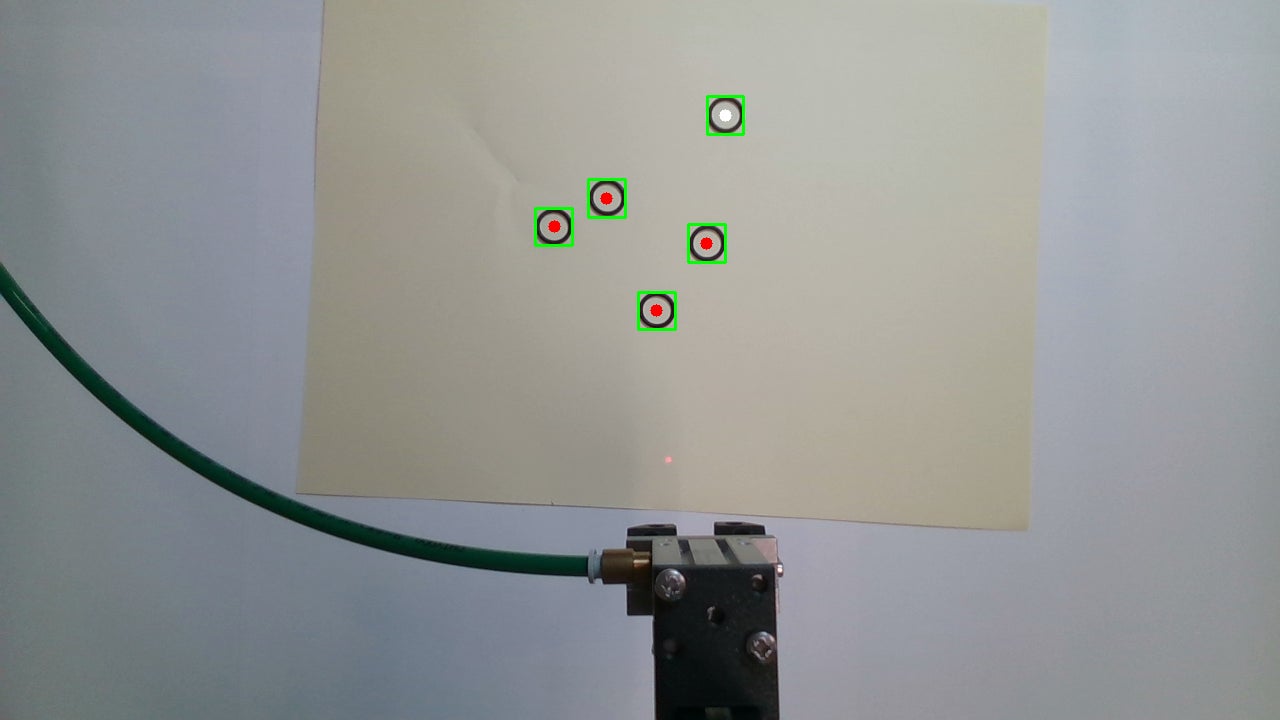
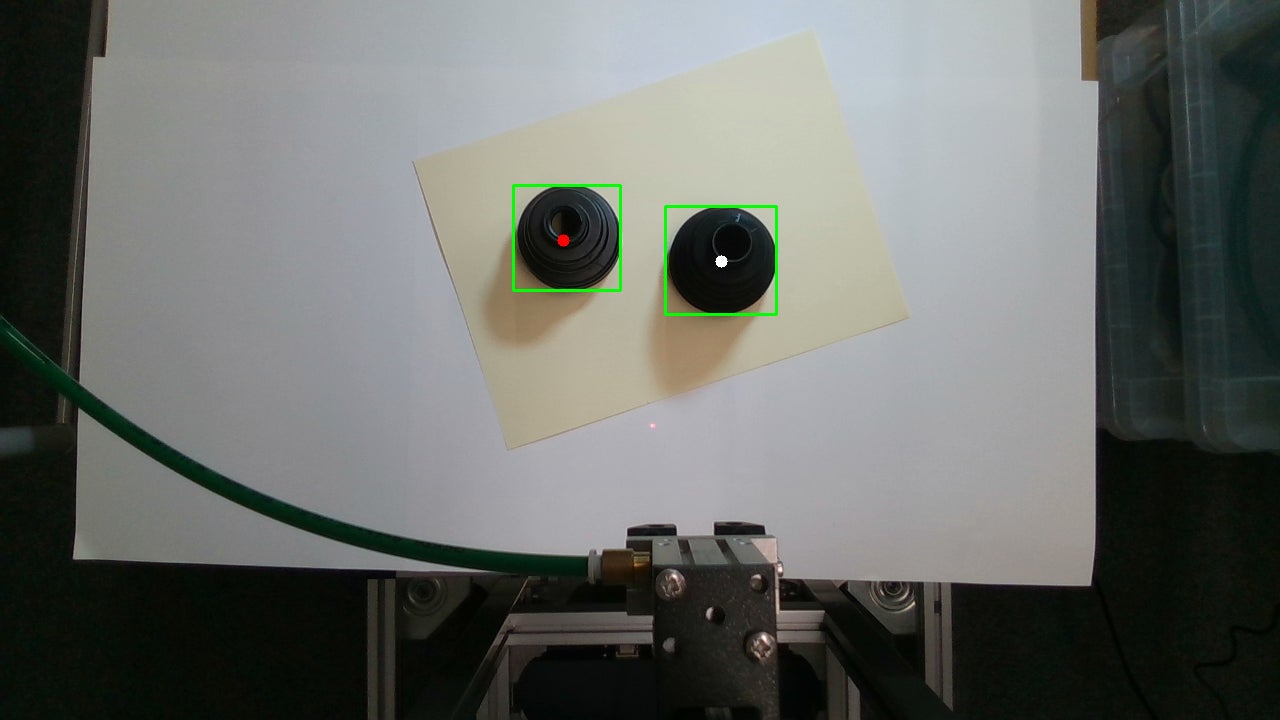
本研究では、システム設計を「作業認識」「身体認識」「環境認識」という3要素に分割し、それぞれを目的特化型の生成AIで限定的に適用する手法を開発しました。これにより、産業現場で求められる安定した性能と応答速度を確保しつつ、AI導入に伴う負担の軽減にもつながる設計フレームを実現しています。
実証結果の要点
-
10種類以上のワークを対象にしたピックアンドプレイス動作生成実験において、精度と速度の両方で実用水準を満たす成果を確認しました。
-
AIモデルの更新(ChatGPT‑4 → ChatGPT‑5)によって、処理速度・安定性がさらに向上する傾向を確認し、将来の拡張性にも期待が持てる結果となりました。
■学会概要
学会名:第43回日本ロボット学会学術講演会
<一般講演>
発表日程:2025年9月5日(金)14:15~14:30
会場:東京科学大学 大岡山キャンパス D室(M‑B43)
発表タイトル:「LLM/VLMを用いた産業用ロボットの動作指示システムの対象物の違いによる性能の確認」
発表者:西田亮介(当社社長)
<ランチョンセミナー>
発表日程:2025年9月4日(木)12:45~12:55
会場:東京科学大学 大岡山キャンパス O-c室 西講義棟1( WL1-401)
講演タイトル:「労働力不足問題解決のための当社の取り組み~共創者を求む!~」
発表者:川村貞夫(当社副社長)
■今後の展開と意義
当社としては、「目的特化かつ最小限のAI利用」という現場に即した設計思想が、産業現場でのロボット導入を着実に前進させる要素になると考えております。今後もこのアプローチをもとに、さらに高度な動作対応や応用ワークの拡大に取り組んでまいります。
ロボット統合制御ソフトウェア「クルーボ」について
クルーボは、カメラ映像を活用した新方式のビジュアルフィードバック制御により、キャリブレーション不要で±0.02mmの精密制御を実現するソフトウェアです。
複数メーカーのロボットに対応し、移動体や柔軟な生産ラインでも高精度動作が可能で、低コストで高性能な自動化を実現します。
■特徴
1. ±0.02mmの高精度制御を可能にする“新方式のビジュアルフィードバック”
ロボット動作中にカメラ映像を解析し、常時軌道を自動補正する独自制御方式を採用。
事前キャリブレーションが不要なうえ、作業対象のズレや揺れにも柔軟に対応。
微細部品の組立・挿入・検査といった高精度作業にも汎用ロボットで対応可能。
(ビジュアルフィードバック制御:ロボット動作中にカメラ映像を取得し、対象物との相対位置をリアルタイムに補正する制御方式)
2. 移動体・工程変更にも強い、キャリブレーションフリー設計
制御の基準をカメラ座標に置くことで、ロボットとカメラの位置関係に依存しない制御を実現。
AGVや可搬装置などの移動型ロボットにも対応可能で、工程変更やレイアウト変更にも強い。
専用ジグを使用しない運用や省スペースラインの構築が容易になる。
3. 10社以上メーカー対応+汎用機材での高機能化が可能
Fanuc、三菱、安川、デンソー、川崎、UR、JAKA、DOBOTなど主要10社以上の産業用ロボット、協働型ロボットに対応。
市販のUSBカメラや既存設備と組み合わせることで、低コストでも高度な自動化が可能に。
Visual Studio CodeとC++ APIを通じて内製開発・拡張にも対応可能。
(Visual Studio Code:軽量な統合開発環境 API:アプリケーション開発用インターフェース)
■株式会社チトセロボティクス
YouTubeチャンネルでロボット動画を多数公開中!
最新の技術を使ったロボットやロボットハンドをぜひご覧ください。
株式会社チトセロボティクスは、ロボット技術の可能性をさまざまな領域に広げることを目指し、実用的かつ先進的なソリューションの開発に取り組んでいます。
私たちが描くのは、「人とロボットが自然に協働し、それぞれの強みを活かせる未来の働き方」です。
人は創造的な業務や判断を担い、ロボットは繰り返し作業や精密な動作を支援することで、生産性と働きがいの両立を実現します。
人とロボットが協働する未来の働き方をかたちにし、持続可能で豊かな社会の実現に貢献してまいります。
所在地 :〒112-0002 東京都文京区小石川2丁目1-1ユニオン小石川第2ビル7階
事業内容 :ロボット制御ソフトウェア「クルーボ」の開発・販売
ロボットシステムの研究・開発・販売
代表取締役:西田亮介
URL :https://chitose-robotics.com/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
