藤田医科大学東京 先端医療研究センターにサービスロボット「FORRO(フォーロ)」新型機種を導入


今回導入した新型「FORRO(フォーロ)」は、荷室容量の約30%拡大(77l→100l)や走行音の低減など、現場での使いやすさを一層高めたもので、センター内で行われる各種検査の検体配送に従事します。新型機種の導入により安全性を確保しながら医療従事者のさらなる負担軽減および業務効率化を目指すとともに、今後の病院におけるサービスロボットの活用方法について検討していきます。
 藤田医科大学東京 先端医療研究センターでの稼働の様子
藤田医科大学東京 先端医療研究センターでの稼働の様子
FORROを活用したサービスの主な特徴
(1)24時間安定稼働
- 広範囲をセンシングし、外来患者様が多い日中の混雑時間帯でも安全に走行。また、病院特有の環境変化の多さ(ドアの開閉・カートやベッドの有無等)でも確実に走行。
- 45分の充電で連続6時間稼働可能。タスクとタスクの間に自動充電し、稼働時間を最大化。
- 藤田医科大学病院にて、病院での常時運転では全国初となる「エレベータでの人とロボットの相乗り」を実現。混雑時の乗車見送りや、タッチパネル・手動操作でベッドを優先させるための緊急降車が可能。
- 川崎重工、SEQSENSE、株式会社近計システム、デジタル・インフォメーション・テクノロジー株式会社が共同開発したプラットフォームクラウドシステム、ロボット連動ユニットを使ったことで、エレベータへの停車指示やスムーズな乗り降りが可能。
(2) 簡単導入
- ロボット専用Wi-Fiを設置する必要がないため、初期導入費用を大幅に抑制
- シンプルなユーザーインターフェースで直観的に操作可能
- 右側走行(あるいは左側走行)といった院内ルールに合わせた走行が可能
(3)大容量で広範囲を巡回、複数個所でタスク実行
- 荷室容量を77lから100lへ拡大。セキュリティロック付。棚は用途に応じてカスタマイズ可能。
- 複数病棟の巡回走行が可能
(4)効率的なルートで安全かつスピーディーに移動
- 周囲の混雑具合、時間帯、エリア別に最適な速度に調整するシステムを搭載。混雑していない環境では安全を確保しながら高速モードに切り替え。
- 周囲の人とモノを検知しながら、目的地まで最適なルートを選択し走行
(5)スマートフォンで簡単呼び出し
- スタッフステーション・検査部に設置されたスマートフォンでFORROを所定の位置への呼び出し、配送状況の確認、到着時の通知受信が可能
- FORRO本体のタッチパネル操作同様、シンプルで直観的な操作が可能
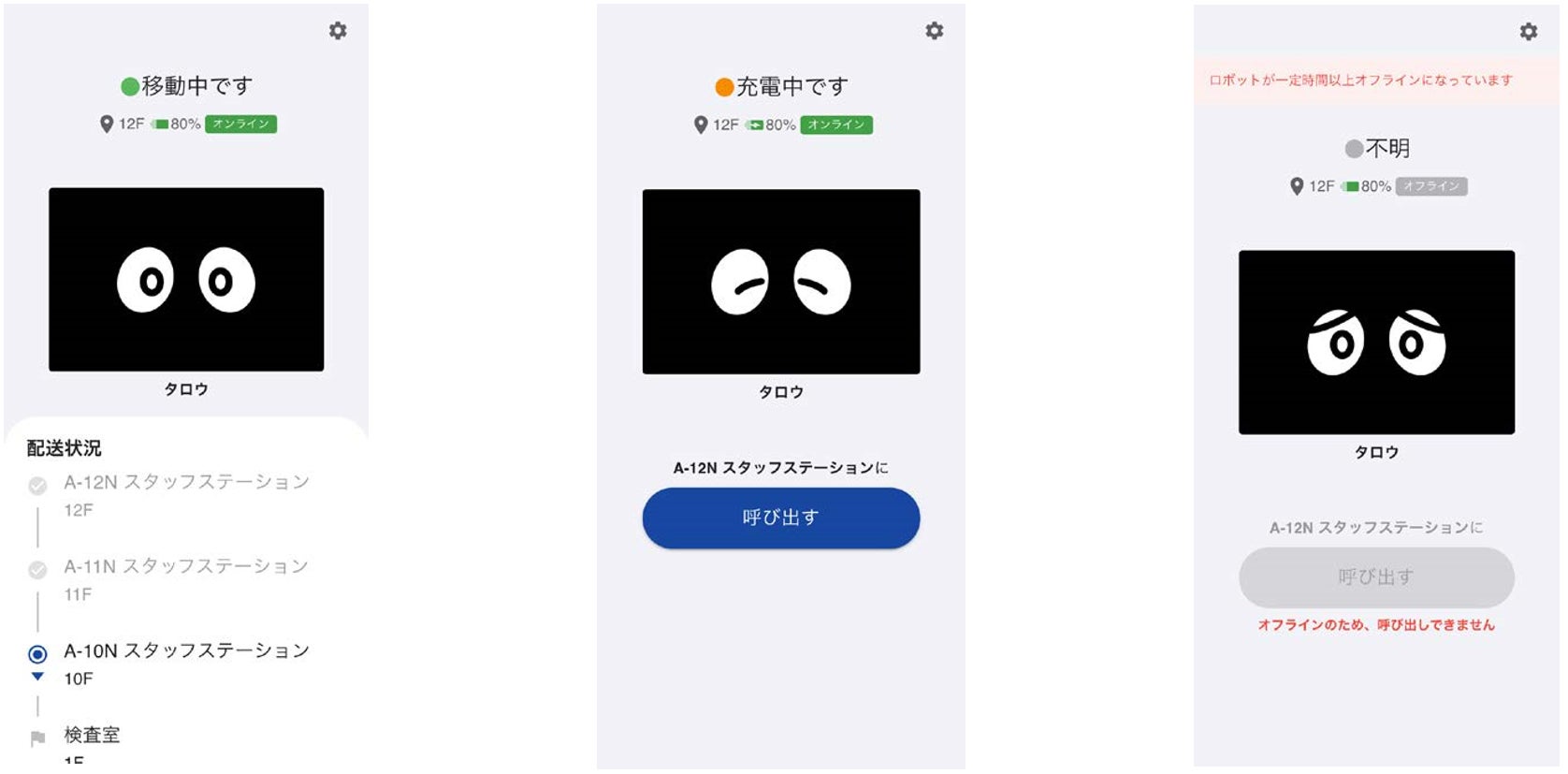 ロボット操作端末画面(※画面は開発中につき、変更の可能性があります)
ロボット操作端末画面(※画面は開発中につき、変更の可能性があります)
<過去のプレスリリース>
● 2021 年 10 月 18 日発表「藤田医科大学病院でスマートホスピタル実現に向けたサービスロボット実証実験を開始~医療従事者の負担軽減、“人”と“ロボット”が共存する近未来医療環境の構築へ~」
https://www.khi.co.jp/pressrelease/news_211018-1_1.pdf
● 2022 年 2 月 16 日発表「藤田医科大学病院でアーム付きサービスロボットによる実証実験を実施~医療従事者の負担軽減・業務効率化による、質の高い医療の持続的提供の実現を~」
https://www.khi.co.jp/pressrelease/detail/20220216_1.html
● 2022 年 8 月 10 日発表「屋内配送向けサービスロボットによる病院内実証実験を実施 共同開発ロボットにより世界最高峰の自律走行性能と病院内での安全・確実な走行を実現」
https://www.khi.co.jp/pressrelease/detail/20220810_1.html
● 2022 年 12 月 20 日発表「屋内配送向けサービスロボットによる病院内実証実験を実施~複数台ロボットとエレベータを連携した 24 時間運用を検証~」
https://www.khi.co.jp/pressrelease/detail/20221220_1.html
● 2023 年 7 月 10 日発表「藤田医科大学病院で屋内配送向けサービスロボットのトライアルサービス
を開始」
https://www.khi.co.jp/pressrelease/news_230710-1.pdf
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
