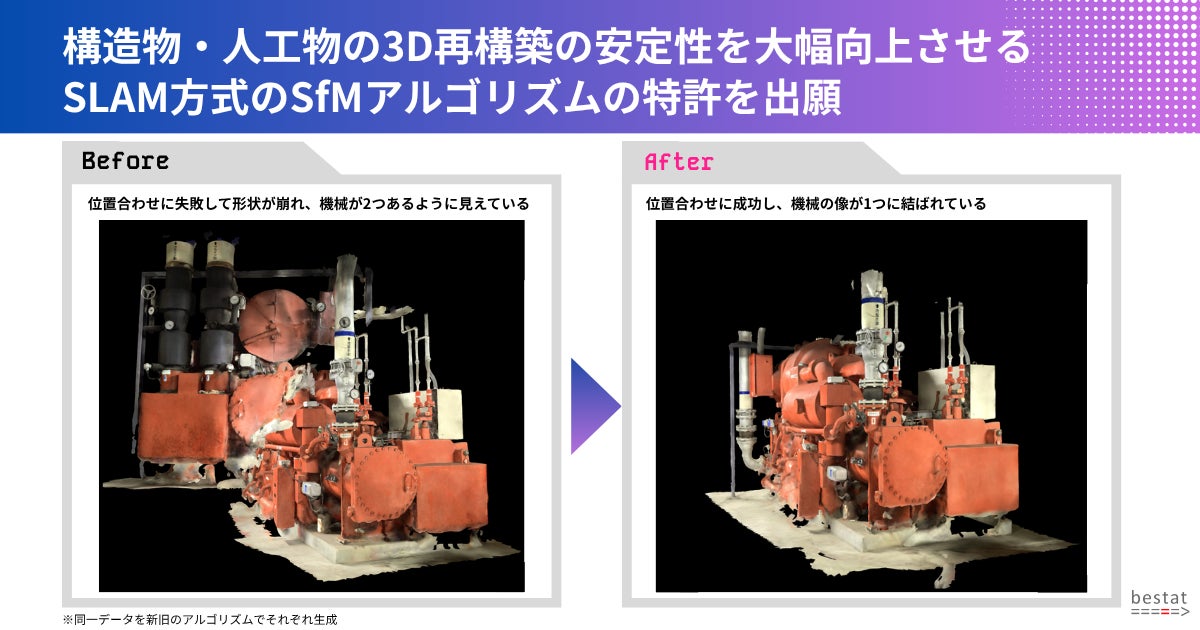
bestat、SLAM方式のSfMアルゴリズムにより人工物の3D再構築の安定性を大幅向上
〜独自アルゴリズムを特許出願、製造・インフラ現場での3Dデータ活用を加速〜
3Dデータ処理特化のbestat株式会社(本社:東京都文京区、代表取締役:松田尚子、以下bestat)は、3Dデータの活用クラウドサービス「3D.Core」において、アルゴリズムの一部を刷新しました。
今回実装した「SLAM方式のSfM(Structure from Motion)アルゴリズム」は、iPhoneのARKitが提供するVI-SLAM(Visual-Inertial SLAM)の位置情報を活用しつつ、その累積誤差を独自の相対ポーズ推定により補正するものです。これにより、従来の手法で課題となっていた「致命的な位置合わせ失敗」や「撮ったはずの箇所の欠損」を大幅に削減し、製造・インフラ現場における人工物の3Dデータ生成の安定性・信頼性を向上させます。本アルゴリズムは特許出願済みです。
背景
近年、製造業やインフラ分野において、設備等の現況把握・デジタルツイン構築のために3Dデータの活用ニーズが高まっています。こうした背景から、レーザースキャナーやドローン、スマートフォンによる撮影を活用した3Dデータ生成手法が現場に広がっています。一方で、写真・動画から3Dデータを生成する際には、以下のような課題がありました。
-
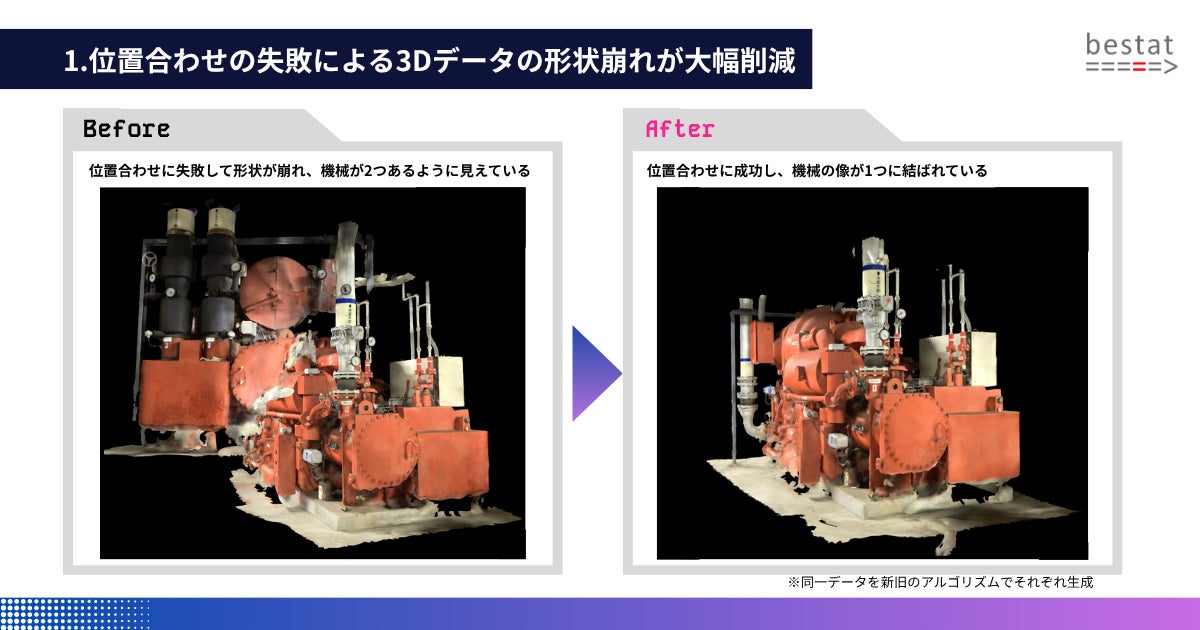
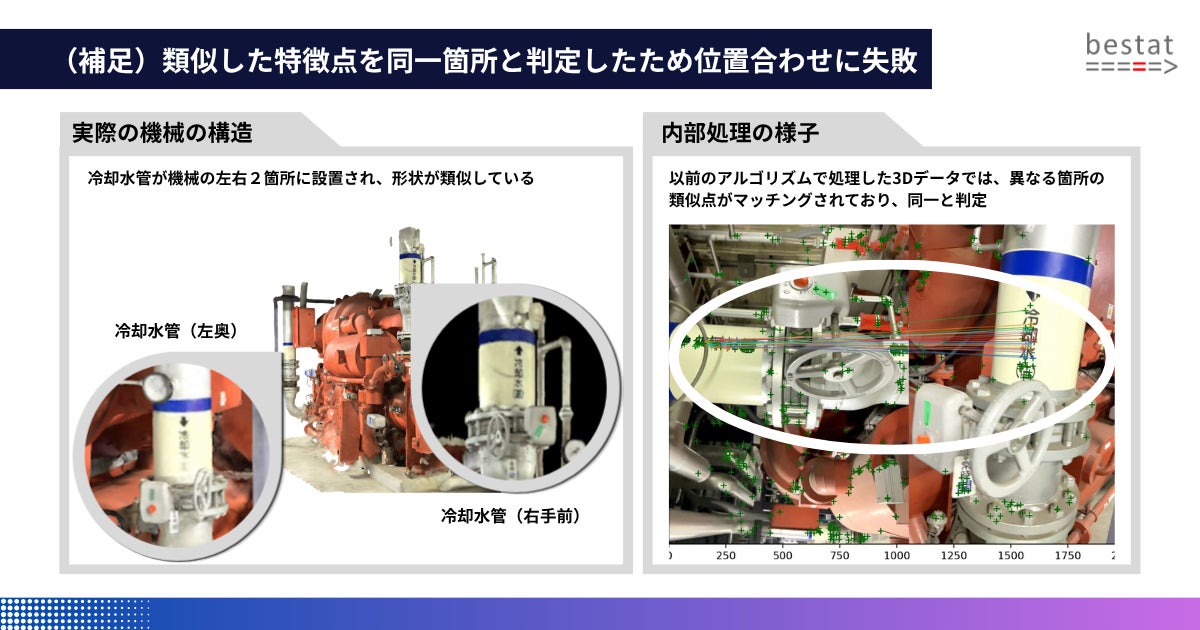
類似箇所を間違えて接合してしまい、モデルが破綻する
-
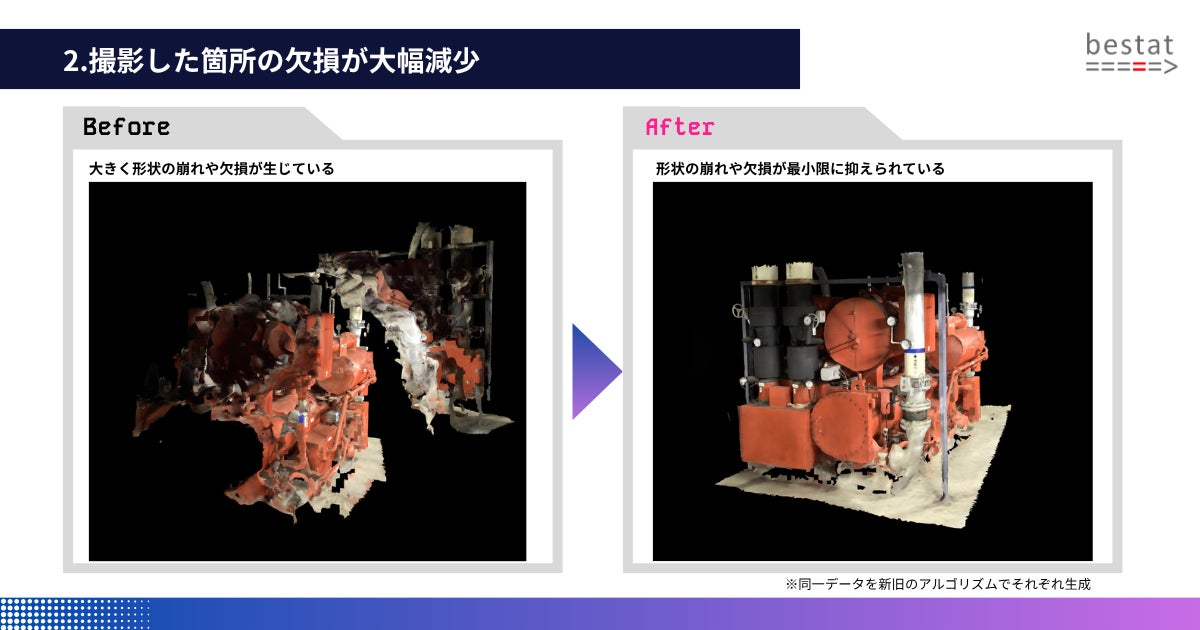
撮影したにもかかわらず、3Dデータに欠損が生じる
このような事象は、人工物の多い製造・インフラ現場で顕著でした。
新アルゴリズムの概要
従来、iPhoneのARKitを用いたVI-SLAM(Visual + IMU)は安定したトラッキングを提供する一方で、累積誤差が蓄積するという課題がありました。本アルゴリズムでは、ARKitの位置情報を活用しながら、独自の「相対ポーズ推定」を組み合わせたSLAM方式のSfMを実装することで、安定性を保ちつつ累積誤差を削減することに成功しました。
本アップデートにより実現されること
-
致命的な位置合わせ失敗の大幅削減:3Dデータ全体が崩壊するケースを低減
-
欠損の大幅削減:「撮ったはずなのに生成されない」箇所が減少
動画でもご覧いただけます。
旧アルゴリズムでの生成結果
新アルゴリズムでの生成結果
技術的特徴
本アルゴリズムの中核は、ARKitが提供するVI-SLAMの位置情報(Visual + IMU)を初期値として利用しつつ、独自の相対ポーズ推定によって累積誤差を補正する点にあります。これにより、従来のSfMが苦手とする以下の条件下でも安定した3D生成が可能になります。
-
特徴点の少ない人工物・設備への近距離撮影
-
広範囲にわたる人工物のスキャン
-
撮影順序が不規則なデータ
※映り込みが激しい・手ブレが大きい・特徴点が極端に少ないといった非常に難しい撮影条件下では、品質は改善されるものの、完全にきれいなモデルが生成できないケースもあります。
今後の展開
bestatでは、「リアルとデジタルが繋がる時代をつくる」というミッションのもと、アルゴリズム研究から製品実装までを一気通貫で推進する自社開発体制を構築しています。3Dデータ処理技術・AI技術の進化を継続的に製品へ反映し、製造・インフラ現場で誰もが扱える3Dデータ基盤をアップデートし続けてまいります。

bestat株式会社
会社名 :bestat株式会社
代表 :代表取締役 松田 尚子
設立 :2018年
所在地 :〒113-0033 東京都文京区本郷6丁目25−14
事業内容:
・3Dデータの取得・生成・活用クラウドサービス『3D.Core』シリーズの提供
・3Dデータ処理API提供
・デジタルツイン構築
・3Dデータ活用にまつわる業務のAIエージェント開発
URL :https://bestat-data.com/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像