独自の自動検出システムによる革新的マシンガイダンス技術を実用化
~汎用重機による非GNSS環境下の掘削施工状況をリアルタイムに可視化~

■鉄建建設株式会社(本社:東京都千代田区、社長:伊藤 泰司、以下「鉄建建設」)、CalTa株式会社(本社:東京都港区、代表取締役CEO:高津 徹、以下「CalTa」)、株式会社マップフォー(本社:愛知県名古屋市、代表取締役:田中 一喜、以下「マップフォー」)は、現在開発中の「独自の自動検出システムによる革新的マシンガイダンス」(2025年3月27日プレスリリース)について、非GNSS環境下における施工条件での適用に向けた検証を終え、本技術が実現場に導入できることを確認しました。
■開発背景・技術概要
建設現場で働く一人ひとりの生産性を最大化し、少人数でも安全かつ快適な環境で働ける建設現場を目指して、独自開発の自動検出システムと可搬式LiDARを組み合わせることで、汎用重機を用いた施工の自動化・遠隔化技術の開発を進めています。
土木施工現場では、トンネル内、高架下、地下空間などGNSS信号が受信できない環境が多く存在し、マシンガイダンス技術の導入を阻む大きな課題となっています。
この課題を克服するために、非GNSS環境下(トンネル、地下空間、屋内などのGNSS信号を受信できない環境)で、掘削等の施工状況を重機オペレーターにリアルタイムにガイダンスする技術の開発に取り組んできました。
この度、点群・画像解析技術を活用した、非GNSS環境下でのマシンガイダンスを実現しました。
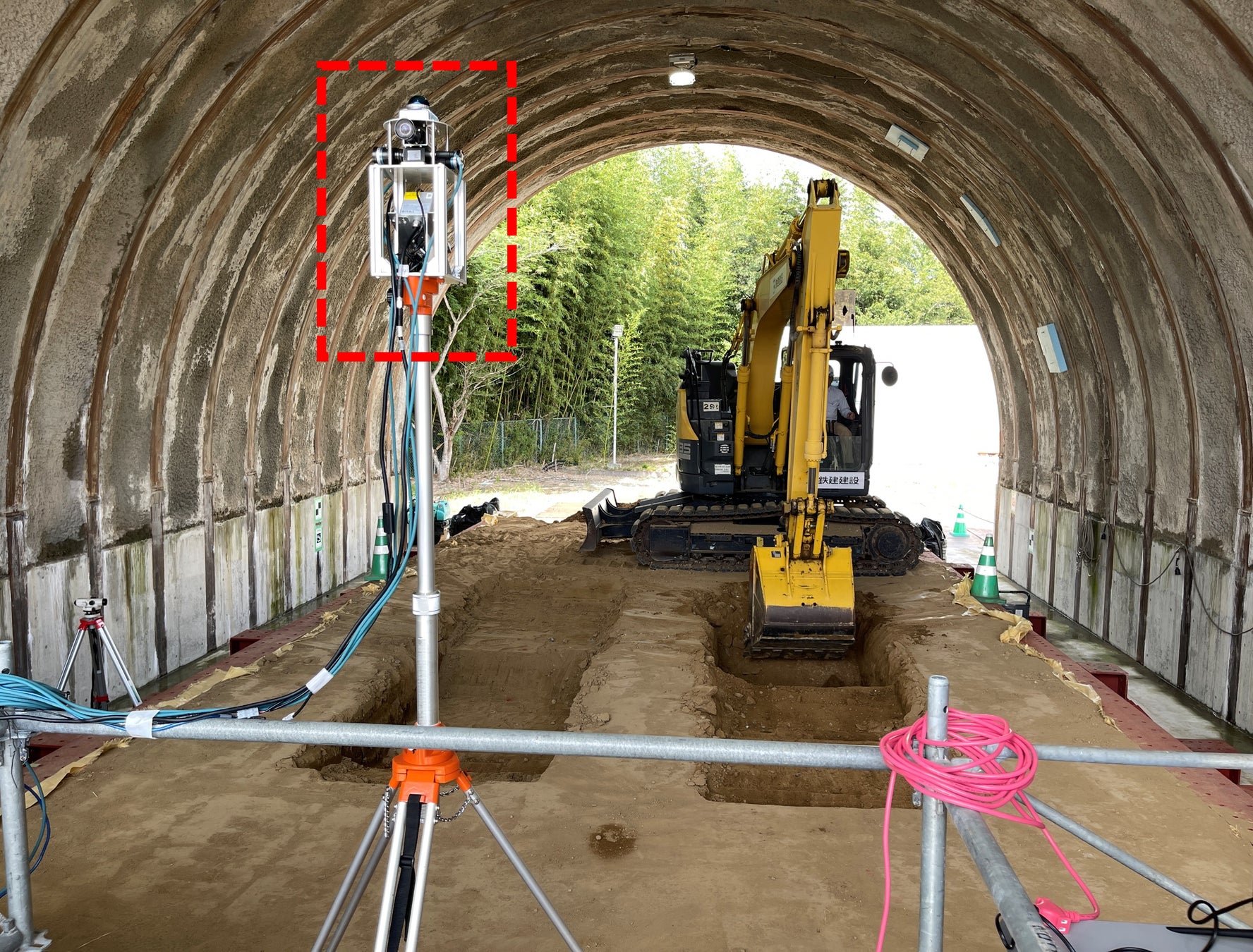
本技術は、撮影カメラと可搬式LiDARが一体となった装置(以下「エッジシステム」)と独自開発の自動検出システムにより、非GNSS環境下の施工状況をリアルタイムでモニタリングすることを可能にするものです。
本技術は以下の特徴があります。
・重機側に特殊なセンサ類を設置することなく、汎用重機を使用したガイダンス施工が可能です。
・エッジシステム周辺に配置した絶対座標が付与された複数のARマーカーを自動で認識し、エッジシステムの自己位置を高精度に認識します。さらに、認識したエッジシステムの自己位置から重機位置を三次元的に表示することが可能です。
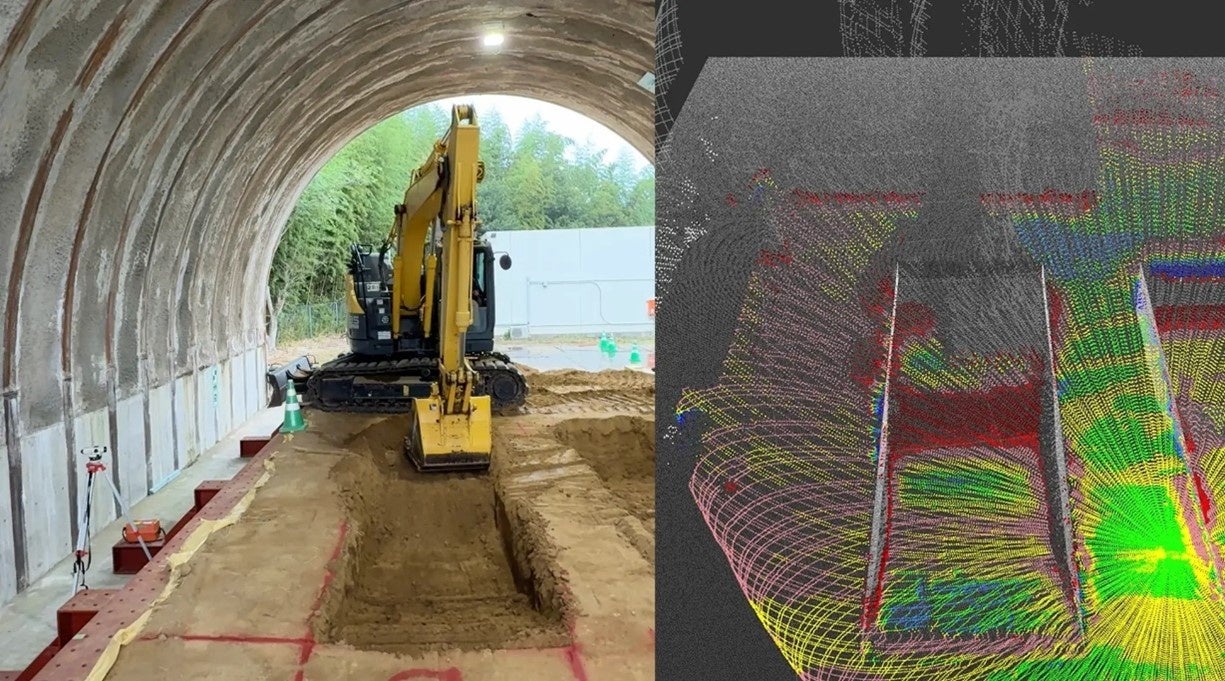
・LiDARが取得した点群データを処理して掘削等の形状変化を自動検出し、重機コックピット内のモニターに設計モデルとの差異をリアルタイムにヒートマップ表示することで、1cm単位で施工状況を可視化します。
・モニターには掘削断面映像と平面映像を個別に表示する等、マルチアングルで視点を表示することが可能で、重機オペレーターは、任意の視点から掘削形状を確認することができます。
・丁張の設置が不要になることで、測量作業を大幅に削減でき、施工の効率化と省人化を実現します。
・重機のバケットの形状や姿勢、動作、重機作業エリアへの人の接近をリアルタイムで検知し、現場の安全管理に貢献します。
本技術により、GNSSの受信が困難な環境でも建設現場のマシンガイダンスが可能となり、安全性や生産性の向上に大きく貢献します。

■実証実験の概要
実証実験では、特殊なセンサ類を装備していない汎用機(0.45m3バックホウ)を用いて、非GNSS環境下の模擬トンネル内で本技術を用いた掘削作業を実施しました。実験では、重機コックピット内に設置したモニターに、掘削出来形ヒートマップとバックホウバケットのリアルタイムな位置、姿勢を表示し、重機オペレーターは画面を確認しながら掘削作業を行いました。
掘削後の測量結果から、本システムを用いた掘削作業において、設計掘削高さに対し平均20mm(余掘り側)程度の出来形が実現し、丁張がない状態でも重機オペレーターは所定の掘削が可能であることを確認しました。これにより、従来のトンネルインバート掘削時に発生していた、稼働重機に近接した場所での作業員による掘削深さの確認作業が不要となり、作業の安全性向上にも寄与することを確認し、現場適用の有効性を実証しました。
また、実証実験を社外関係者に公開し、本技術は安全性・生産性向上に寄与する基礎技術として応用範囲が広く、現場実装が可能な段階であるという評価を得ました。
マシンガイダンス検証状況動画(CalTa Youtube公式チャンネル)
左:掘削状況、中央・右:ガイダンス画面
(重機オペレーターは、任意の角度からガイダンス画面を視認可能。ヒートマップは赤色系から黄色に変化すると
所定の掘削深さが確保されている)
■今後の展開
(1)現場適用について
本技術の適用現場や適用作業を精査し、実施工現場でのエッジシステム設置方法や運用手順を決定します。
(2)遠隔施工について
今回の実証実験では、従来作業と同様に重機オペレーターが現場で重機を操縦する方式で検証を行いました。モニターに表示されるリアルタイムの施工の出来形ヒートマップやマルチアングル視点等を活用することにより、モニター越しに奥行き方向の把握が可能となったため、今後は、同様の掘削作業を遠隔操縦する実証実験の計画を進めていきます。
(3)本技術の更なる発展と活用
今後、エッジシステムの自己位置推定に関する計測システムの性能向上および、計測対象を問わないマルチ計測技術を確立し、非GNSS環境を含む様々な現場への適用を拡大します。
今回の検証で確立したマシンガイダンス技術を基盤とし、GNSS信号受信環境が劣悪な山間地等の多様な施工現場における施工の自動化、遠隔化、効率化、省力化、安全性の向上に資するソリューションとして提供してまいります。また、建設業界のDXを加速させることで、労働力不足の解消やリモートでの施工管理を実現し、持続可能な業界の未来を創造していきます。



このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像