株式会社人機一体は、2023 国際ロボット展(リアル会場)に出展します
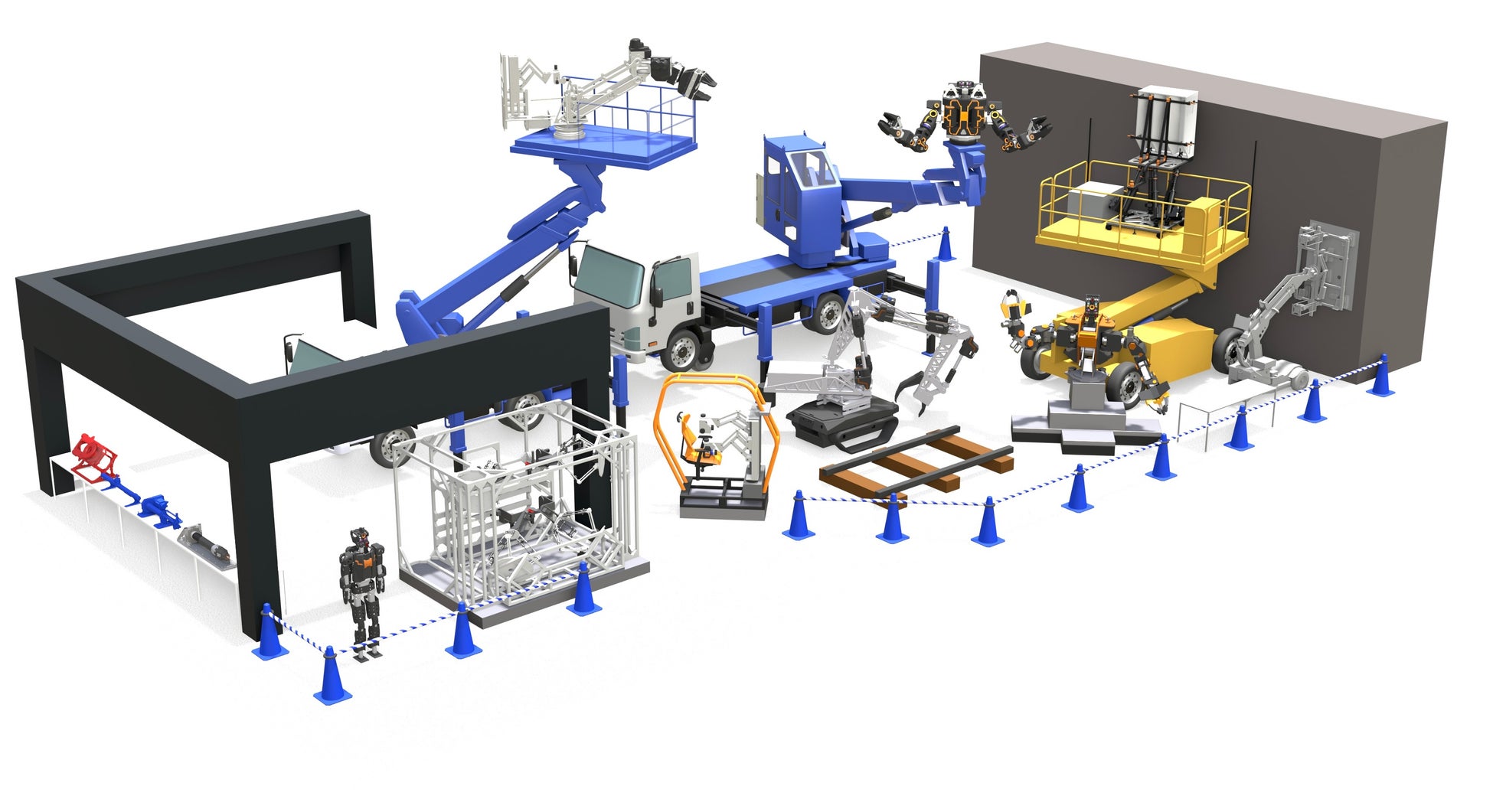
展示コンセプト「203X 年 人機一体の先端ロボット工学技術で機械化された工事現場」として、人型重機をはじめとした複数のロボット重機による協調作業の実演展示を行ないます
本展示では「203X 年 人機一体の先端ロボット工学技術で機械化された工事現場」というコンセプトを掲げ、工事現場で人が直接的に介在することなく複数のロボットが連携して作業する近未来の工事現場をイメージしたデモンストレーションを実施します。
※ 株式会社人機一体 本社:滋賀県草津市、代表取締役社長:金岡博士、以下「人機一体」
出展目的
人機一体では、人機(人間機械相乗効果器)のコンセプトに基づく多様な PoC(※)試作機を開発し、さらに独自の共創ビジネスモデル「人機プラットフォーム」を通じた企業連携を積極的に推進することで、先端ロボット工学技術の社会実装を進めています。
本展示では、力・トルクベースの先端ロボット工学技術に立脚した複数の人機が、現場現物合わせで臨機応変に連携する近未来の工事現場を具現化することで、技術の観点から社会実装の実現可能性の高さを感じていただけます。また、人機一体と連携する多くの協賛企業と共に本展示を運営することで、同じく社会実装の実現可能性の高さをビジネスの観点からも感じていただけます。
これらの周知を以て人機の社会実装をさらに加速することを、本展示の目的とします。
※ PoC = Proof of Concept、概念実証
展示の見どころ
展示コンセプト「203X 年 人機一体の先端ロボット工学技術で機械化された工事現場」
AI の進歩が著しく、自動化が進む 2023 年現在。一方で、インフラメンテナンスや土木建築などの現場では、未だに人が生身での対応を余儀なくされる重作業や危険作業が残っている。
ここは 203X 年 人機一体の先端ロボット工学技術で機械化された工事現場である。人間は、安全な環境下でフィジカルな苦痛を伴うことなく、人間機械相乗効果器「人機」を自分の身体の延長のように自由自在に操り、さらに複数の「人機」が連携して重作業を行なう。
人機一体は先端ロボット工学技術を駆使し、機械化された未来の工事現場を具現化する。
本展示ではロボット重機単独のデモンストレーションだけでなく、複数機による協調作業のデモンストレーションも実施します。現在、人が生身での対応を余儀なくされている重筋作業や危険作業の現場にロボット重機が導入された近未来の作業イメージを実演し、人が安全な環境で身体的負荷なく働ける工事現場を具現化します。
出展する PoC 試作機の概要
<共通コンセプト>
■ 自動化できない現場での活用
人機一体が出展するロボット重機は、すべて「人間や機械が単独で実現できない仕事を、人間と機械の相乗効果により実現する機器 = 人間機械相乗効果器」すなわち “人機” であり、人が操作することで、自動自律型のロボットでは対応できない現場(未知環境下)で活用することをコンセプトとしています。
■ 専用機ではなく汎用機
一つの作業に特化した専用機ではなく、建設機械(重機)のように不特定多数の作業に対応できる汎用機をコンセプトとしています。
人機一体は、2023 国際ロボット展において以下の PoC 試作機を展示します。
(1)〜(2)零式人機(レイシキジンキ) ver.1.3 / ver.2.0
人が生身で行なっている高所での多様な重筋作業および危険作業の機械化を目的とした汎用人型重機の社会実装コンセプトとしての PoC 試作機を展示します。
零式人機 ver.1.3 は「空間重作業人機社会実装プラットフォーム」において、西日本旅客鉄道株式会社(以下「JR 西日本」)、日本信号株式会社(以下「日本信号」)、および人機一体の 3 社により共同開発された零式人機 ver.1.2 をベースに、周りとのコミュニケーションツールとしての機能を搭載した頭部(センサーヘッド)と、腰部の 2 軸動作を追加した人型重機です。新たな頭部は、指向性のマイクやスピーカを搭載することで、見ている人との声によるコミュニケーションが可能となり、また作業に応じて機能を追加できるマウントとしての役割を有します。さらに、腰部のバイラテラル制御を実装することで作業範囲が拡大し、より汎用な作業に対応可能となりました。
 零式人機 ver.1.3 CG
零式人機 ver.1.3 CG
零式人機 ver.2.0 は、零式人機 ver.1.2 と同じ 3 社により共同開発されたロボット重機であり、2024 年を目処に日本信号での製品化および JR 西日本の営業線への導入が予定されている製品のベースとなる PoC 試作機です。
零式人機 ver.1.3 および零式人機 ver.2.0 の同時展示による協調デモンストレーションの実施は、本展示が初公開となります。
 零式人機 ver.2.0 + iREX2022 での展示
零式人機 ver.2.0 + iREX2022 での展示
(3)零一式カレイド ver.1.0
川崎重工業株式会社(以下「川崎重工」)の協力のもと、ヒューマノイドロボット「Kaleido(※)」に、人機一体の複数の特許技術を試験的に搭載した零一式カレイド ver.1.0 を展示します。人機一体は、独自の力制御技術を統合した集大成としての「二足歩行人型ロボットを用いた力制御ベースの全身遠隔操作システム」の開発を進めており、本展示では、その途中成果として上半身の力順送型バイラテラル制御デモンストレーションを行なう予定です。また、下半身の二足歩行制御技術については、広島大学機械力学研究室(菊植亮教授)との共同研究が進んでおり、本展示は菊植亮教授グループと共同で運営されます。
将来的な用途としては、有害物質汚染が懸念される危険環境下における部品交換、触診点検といった緻密な作業のほか、アスベスト等の有害物質含有構築物の解体、山岳トンネル工事の爆薬装填など、人が行なうこと自体に危険あるいは労災リスクが伴う作業を本機を操作して行なうことを想定しています。
(※)Kaleido は、川崎重工が研究開発を行なっているヒューマノイド(人型)ロボットであり、成人と同程度の体格を持ちながら「転んでも壊れない」堅牢な構造を特徴としています。
 零一式カレイド ver.1.0 CG
零一式カレイド ver.1.0 CG
(4)零二式人機 ver.1.0【初公開】
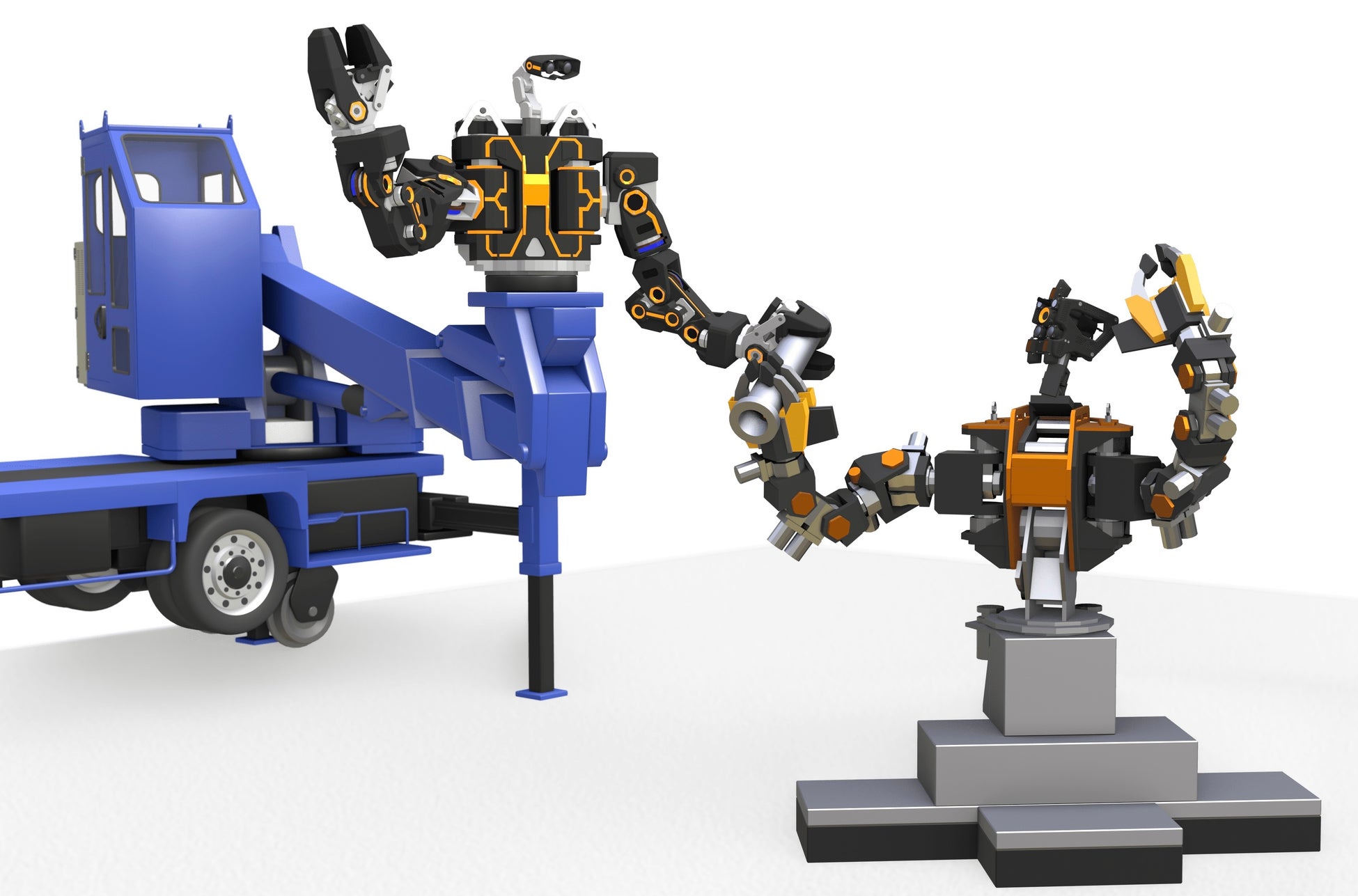
高所における百数十 kg オーダーの重量物ハンドリング作業の機械化を目的とした汎用単腕重機の社会実装コンセプトとしての PoC 試作機、零二式人機 ver.1.0 を初展示します。本 PoC 試作機は「空間重作業人機社会実装プラットフォーム」において、JR 西日本、日本信号、および人機一体の 3 社により共同開発されたロボット重機です。
本 PoC 試作機は、高所作業車などのデッキ上に設置した状態で運用することが想定されており、本体に搭載されたウインチにて地上から部材を引き上げ、高所作業車のデッキ上もしくは空中で直接部材を把持できます。操作系統は、本体後方に搭載されている操縦席での近接操作と、本体の先端部分についた操作グリップでの直接操作の二つあり、現場の状況に応じた柔軟な協調作業が可能となります。
 零二式人機 ver.1.0 CG
零二式人機 ver.1.0 CG
(5)〜(7)人機並進駆動ユニット ver.2.0 / ver.3.2 / ver.5.0【初公開】
人機並進駆動ユニット ver.2.0 および人機並進駆動ユニット ver.3.2 は、油圧シリンダに匹敵する高出力・高耐衝撃性を備えた電動シリンダの社会実装を目指して人機一体が独自開発した、原理試作としての PoC 試作機です。電動シリンダでありながら人機一体独自の力制御技術を実装することで緩急剛柔⾃在な⼒制御を可能とし、高い耐衝撃性を実現しています。
さらに本展示では「人機並進駆動ユニット社会実装プラットフォーム」における株式会社椿本チエイン、株式会社タダノ、および人機一体による 3 社共同開発の成果として、油圧シリンダに匹敵するパワーウエイトレシオを実現した社会実装コンセプトとしての PoC 試作機、人機並進駆動ユニット ver.5.0 を初展示します。
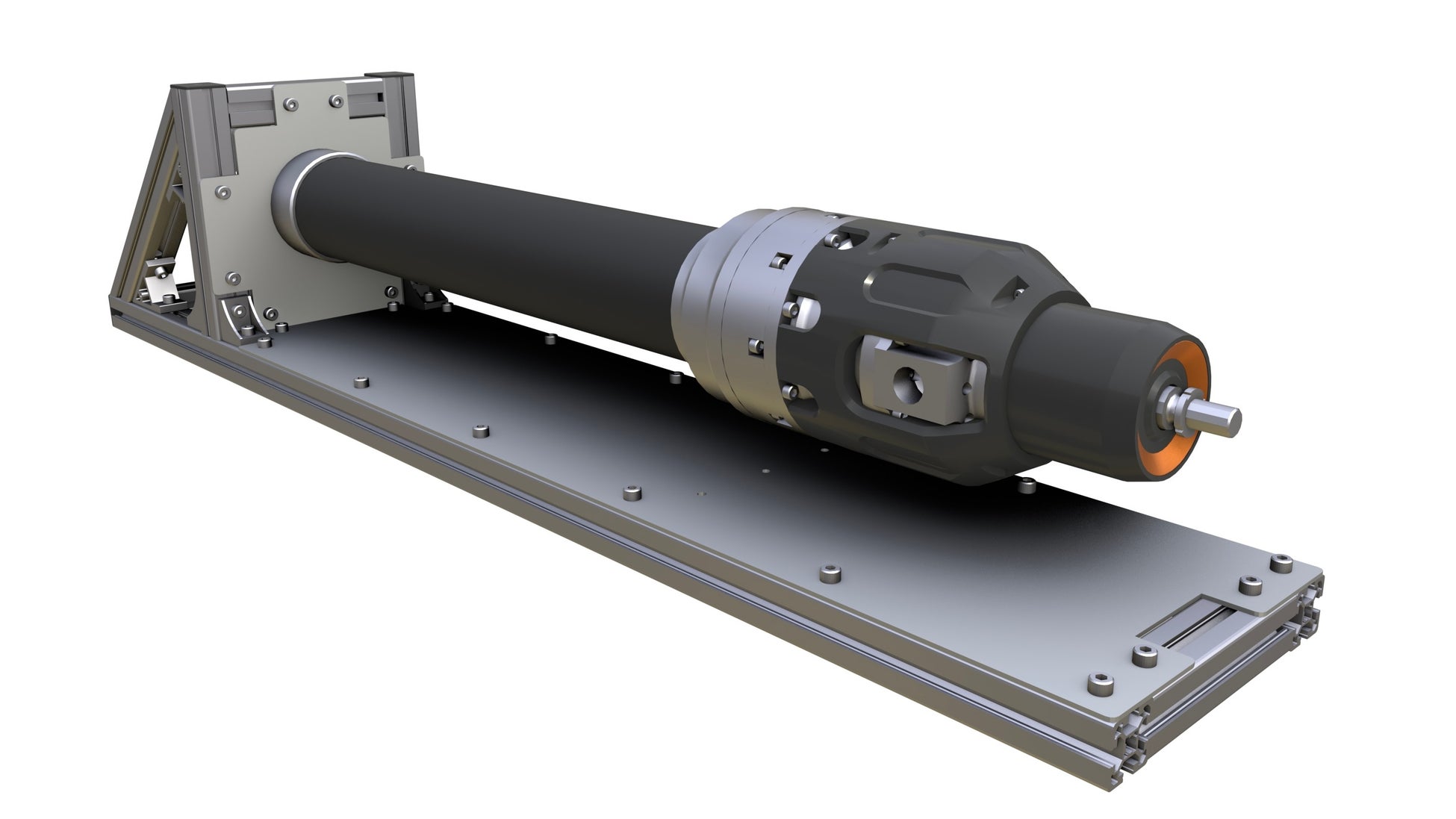 人機並進駆動ユニット ver.5.0 CG
人機並進駆動ユニット ver.5.0 CG
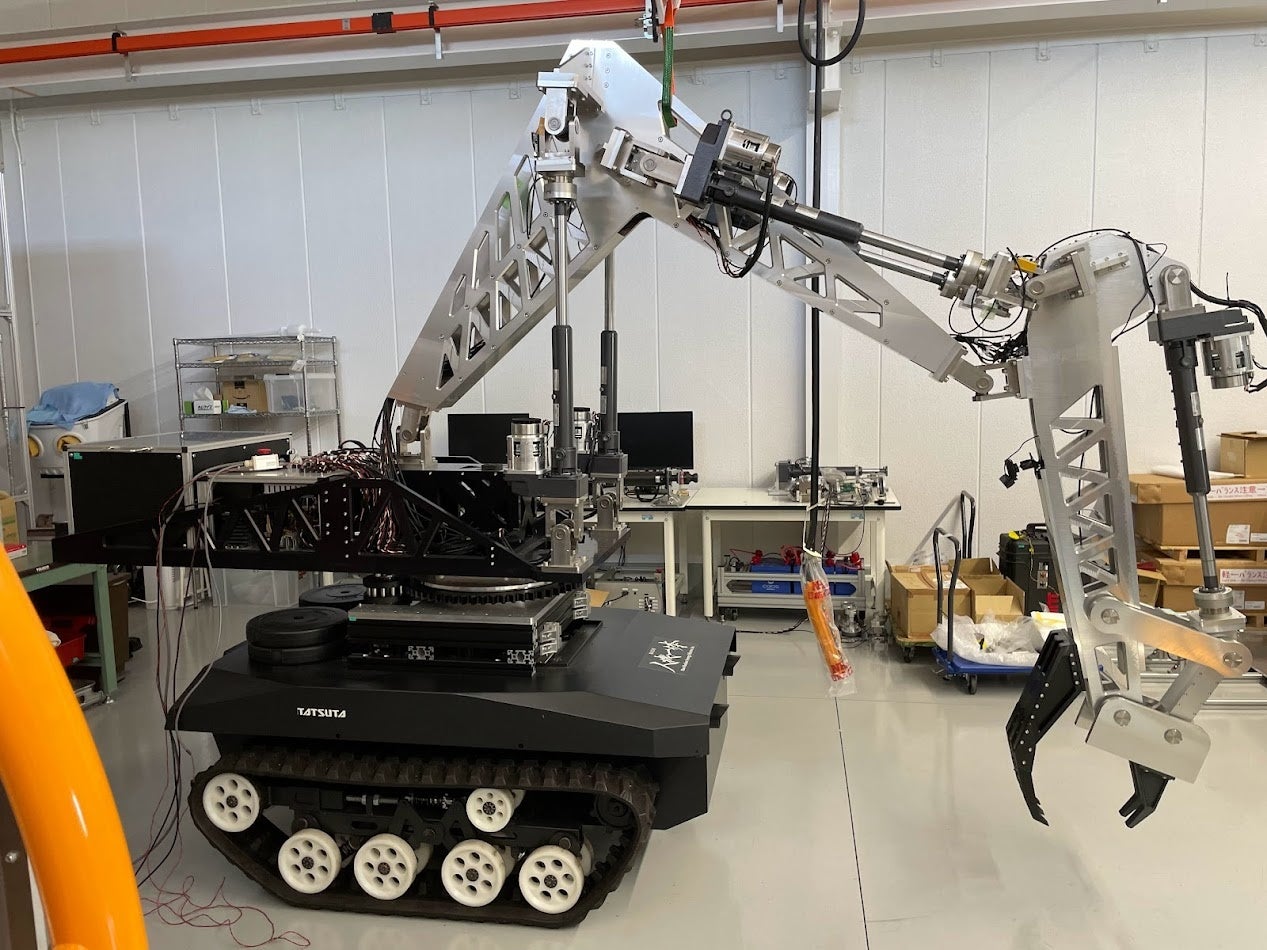
(8)人機ショベル ver.1.2(人機並進駆動ユニット ver.4.0 搭載)
次世代の環境対応型重機として、油圧駆動系を一切持たない完全電動ショベルの原理試作としての PoC 試作機、人機ショベル ver.1.2 を展示します。本 PoC 試作機には人機並進駆動ユニット ver.4.0 を搭載しており、当該ユニットの社会実装の在り方として一つの可能性を示します。人機並進駆動ユニットを搭載することで、従来の油圧ショベルでは難しかった繊細な力加減による操作が可能となり、掘削作業の効率化および安全性向上に寄与します。本展示では、先端アタッチメントとしてグラップルを装着し、柔脆な部材の把持など掘削以外の用途でも使用できることを示します。
 人機ショベル ver.1.2
人機ショベル ver.1.2
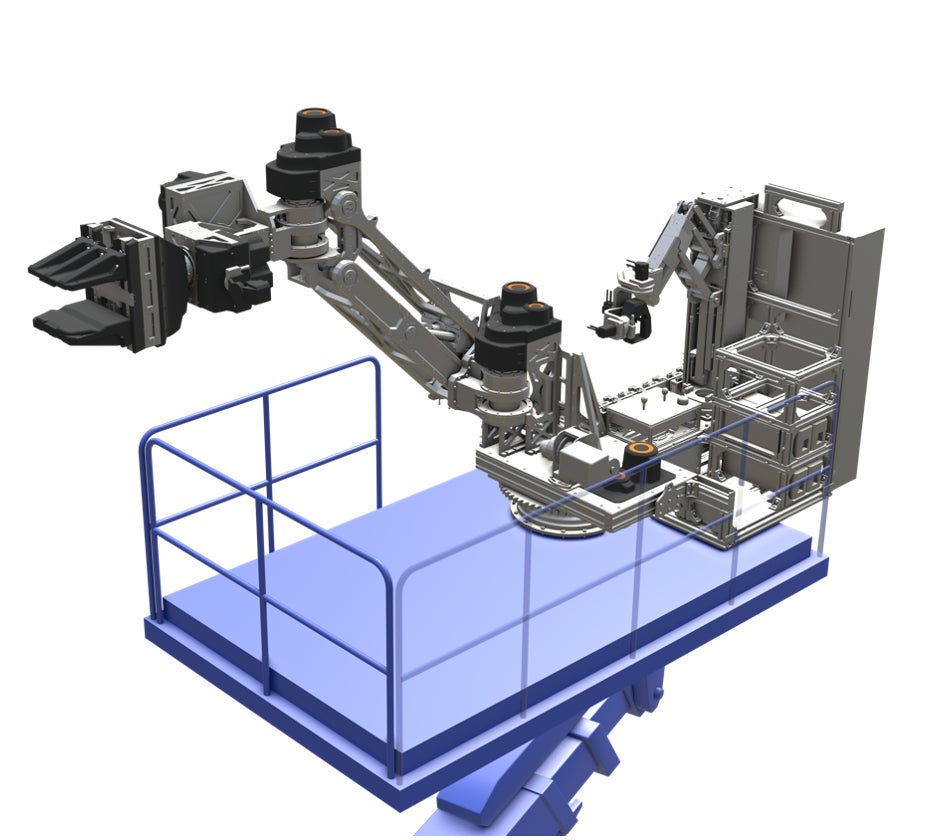
(9)人機スチュワートプラットフォーム ver.1.3(人機 GSP ver.1.3)
人機 GSP は、数トンオーダーの高重量物の、接触を伴う位置決め(短距離運搬)、設置などの作業を機械化することを目的として人機一体が独自に開発を開始したスチュワートプラットフォームの原理試作としての PoC 試作機です。本展示では「空間重作業人機社会実装プラットフォーム」における株式会社竹中土木、東北電力ネットワーク株式会社、および人機一体の 3 社共同開発の成果として、力順送型バイラテラル制御が実装された人機 GSP ver.1.3 を展示します。
本 PoC 試作機の運用例の一つとして、デッキリフトや高所作業車などのデッキ上での運用が想定されています。接触を伴わない大まかな位置決めはデッキリフト等で行ない、微細な調整と力制御が必要となる、接触を伴う位置決めを本 PoC 試作機で行なうことで、これまで人力に依存していた設置作業を機械化し、作業効率を向上させることができます。主にクレーン設備がないまたはクレーン車の吊上高に制限がある環境下(橋梁下等)での活用を想定しています。
 人機 GSP ver.1.3 CG
人機 GSP ver.1.3 CG
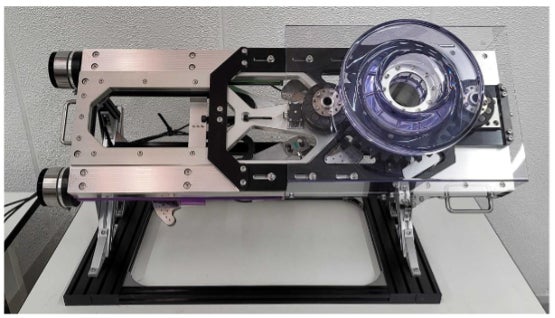
(10)人機エンタープライズドライブ ver.1.2(人機 EPD ver.1.2)
人機 EPD ver.1.2 は、無段変速機構を有する電動アクチュエータユニットの社会実装を目的として人機一体が独自開発した原理試作としての PoC 試作機です。2 台の直動アクチュエータが受動回転関節を介して二つの駆動リンクに接続されており、各リンクは片持軸で支持された多段構成となっています。リンク同士が動作範囲内で干渉を回避できる機構とすることで、出力軸は無限回転が可能となり、滑らかな可変減速比を実現しています。本アクチュエータユニットの搭載により、高出力を求められる重作業と素早さを求められる繊細な作業を両立することのできる剛柔自在な次世代型電動重機の社会実装を目指しています。現在は、制御システムの改良実装に向けて九州大学ヒューマンセンタードロボティクス研究室(田原健二教授)と共同研究開発が進んでおり、本展示は田原健二教授グループと共同で運営されます。
 人機 EPD ver.1.2
人機 EPD ver.1.2
協賛企業


開催概要
名称 :2023 国際ロボット展(iREX2023)
主催 :一般社団法人 日本ロボット工業会、日刊工業新聞社
【リアル会場】
会期 :2023 年 11 月 29 日(水)~12 月 02 日(土)
開催時間 :10:00 - 17:00
入場料 :1,000 円(入場登録者・招待状持参者・中学生以下は無料)
※ 事前の入場登録をおすすめします。→ https://irex.nikkan.co.jp/account/form
■ 人機一体ブース
展示会場 :東京ビッグサイト 東 7 ホール
ブース番号 :小間番号 E7-39
展示会URL :https://irex.nikkan.co.jp/から御覧いただけます。
人機一体ブースおよび人機一体ブース内の展示品については写真撮影、動画撮影、SNS 上での共有、拡散を許可しております。ただし、人機一体ブース以外の 2023 国際ロボット展の会場内は原則として撮影禁止ですので御注意ください。
株式会社人機一体
先端ロボット工学技術を駆使した「人機」の実現により「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発ロボティクスベンチャー企業です。
フィジカルな苦役を無用とするためには「力学ベースの先端ロボット工学技術」の社会における広範な利用が不可欠であると我々は考えます。しかし現状を鑑みると、ロボット工学技術が学術分野において膨大に蓄積されていく一方で、社会実装される技術は極僅かです。
株式会社人機一体は、そのような有益でありながら社会実装されていない技術を集約・体系化し、独自の共創ビジネスモデル「人機プラットフォーム」を通じた企業連携により、力学ベースの先端ロボット工学技術の社会実装に突破口を開きます。

社名 :株式会社人機一体
代表者 :代表取締役社長 金岡博士
所在地 :(本社 秘密基地)
〒525-0041 滋賀県草津市青地町648-1 秘密基地人機一体
(支社 福島基地)
〒975-0036 福島県南相馬市原町区萱浜字巣掛場 45-245
南相馬市産業創造センター内 人機一体福島基地
資本金 :1 億円(2023 年 11 月 01 日 現在)
事業内容:先端ロボット工学技術の知的財産を活用した課題解決型サービス
公式ウェブサイト:http://www.jinki.jp/
電子メール :contact@jinki.jp
X(Twitter) :https://twitter.com/mmseinc
フェイスブック :https://www.facebook.com/mmseinc
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
