VTOL型ドローンを活用した災害発生時における鉄道設備確認の実証実験を行いました
-
東日本旅客鉄道株式会社新潟支社、第一建設工業株式会社およびエアロセンス株式会社の3社にて、VTOL型ドローンの自動飛行機能を活用した鉄道設備確認の実証実験を2024年3月に磐越西線で実施しました。
-
本点検手法を活用することで、災害発生時には鉄道設備の被災状況を迅速に把握することが可能になるとともに、確認者の安全性向上・負担軽減が期待できます。
-
災害発生から迅速に飛行を行える体制の確立や、他の線区での運用に向けた飛行計画の策定について検討を進め、点検業務におけるDX推進を目指します。
1.試験概要
災害発生時における鉄道設備の迅速な確認を目的とし、VTOL型ドローン自動飛行機能を活用した実証実験を行いました。現在の方法では、徒歩や軌道用カートを使い確認者が直接現地を確認しておりましたが、ドローンを活用することで、迅速に広範囲の状況把握が可能となります。また、飛行画像から生成した点群データによって構造物の寸法計測などが可能となり、早期復旧計画策定と確認者の安全確保が期待できます。


2. VTOL型ドローンの機体概要

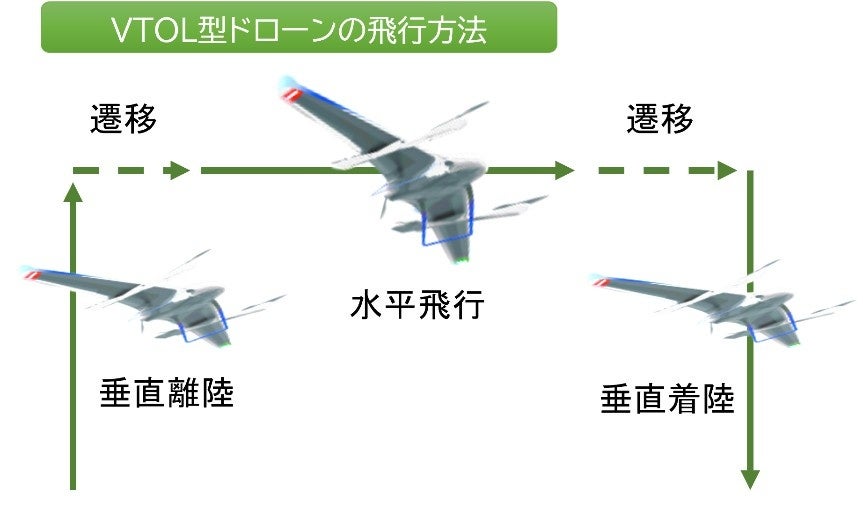
・マルチコプターモードで垂直に離着陸し、固定翼モードで水平に飛行する
・水平飛行中は大幅に電力を抑え長距離飛行が可能
3.試験内容と結果
本試験は、2024年3月の日中時間帯、磐越西線喜多方駅~馬下駅間の約75km区間にて実施いたしました。離陸から着陸まで事前に設定した経路を、最高速度時は100km/hで自動飛行(※1)を行いました。飛行時および飛行後に上空から撮影された画像データなどから、迅速な被災状況の把握が可能であることを確認しています。
⑴ 飛行時のデータ収集・活用
位置情報とLIVE映像を現地から遠く離れた場所へWEB配信することで、被災状況の一次調査に必要な被災有無の確認を速やかに実施することが可能であると確認しました。
⑵ 飛行後のデータ収集・活用
飛行後にはオルソ画像の生成やTRANCITY(※2)を用いて連続画像から点群データを生成し、寸法の確認や、より詳細な被災状況把握が可能であることを確認しました。このデータを活用した復旧計画の策定や、専門技術者による現地詳細調査の実施を想定しています。
(※1) 自動飛行:GPS、加速度、ジャイロ、地磁気、気圧など複数のセンサーから得られる情報を統合し演算処理することで、あらかじめ設定した経路に沿って飛行し、LTE通信により周囲の状況確認や制御維持が可能。
(※2) TRANCITY:動画データをアップロードするだけで、インフラや施設を三次元地図に配置できるデジタルツール(CalTa株式会社、JR東日本コンサルタンツ株式会社、東日本旅客鉄道株式会社の3社で開発)
【関連リリース(2022年5月23日)】
インフラ事業者の DX 実現に向けたデジタルツインソフトウェア「TRANCITY」のサービス開始について
https://www.jreast.co.jp/press/2022/20220523_ho02.pdf

4.今後の展開
VTOL型ドローンの自動飛行機能を活用した鉄道設備確認の実証実験を踏まえ、2025年度内に東日本旅客鉄道株式会社で初となるVTOL型ドローンの実装と、より広範囲での適用の検討や飛行計画の事前策定を進め、ドローンを活用した点検手法のさらなる発展を目指します。
引き続き、DXを活用し効率的なメンテナンスの実現や働き方改革への取り組みを推進していきます。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像