【ポケット・クエリーズ】サン・シールドと地上拠点からの無線遠隔操縦で四足歩行ロボットによる下水道管内走行・撮像に成功
インフラ空間を安全・効率的に可視化―ロボット活用で点検業務の新常識を切り拓く
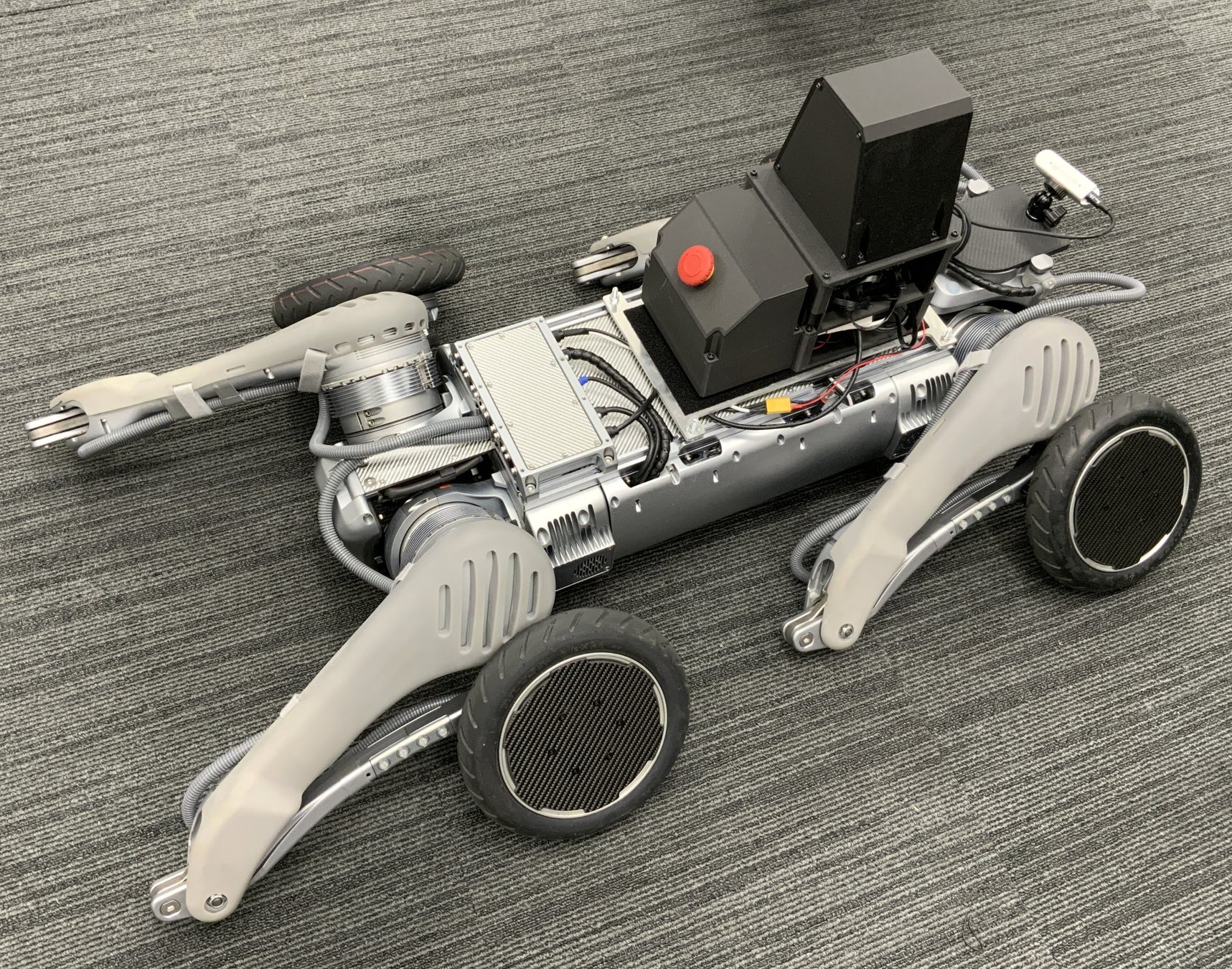
株式会社ポケット・クエリーズ(本社:東京都新宿区 代表:佐々木宣彦、以下当社)は、サン・シールド株式会社(本社:愛知県安城市 代表:米森 清祥)と2025年4月28日、愛知県瀬戸市内の雨水排水管渠工事現場にて最新の四足歩行ロボット「Go2-W」(Unitree社製)と当社が開発したロボット制御システム「iVoRi Box」を用いた地下インフラ点検の無線通信実証実験を実施しました。地上拠点からの安定した無線通信による遠隔操縦・監視・撮像を実現しました。

本取り組みは、老朽化が進むインフラの維持管理業務における、省人化・遠隔化の実現を目指すものです。
当日は、内径1,100mmの下水道管(埋設済)内を対象に、地上からの遠隔操縦により四足歩行ロボットを約140m走行させ、管内の映像取得を行いました。
これにより、内径1,100mmのような狭小断面で、換気や防毒マスクの装着、ガス測定が欠かせず、作業員の立ち入りが困難な環境においても、iVoRi Boxによる直感的な遠隔操作・状況確認と四足歩行ロボットの高い走破性能の組み合わせにより、安全かつ確実にインフラ内部の状況を把握できることを実証しました。
■実証実験の概要
実施日:2025年4月28日
実証場所:愛知県瀬戸市内 雨水排水管渠工事現場
■ 主な成果と技術検証
安定した通信環境の確保
通信機器はWi-Fi AP(Access Point)を1台のみ設置。通信が困難とされる地下環境においても、立坑深7mの距離を通じて安定した遠隔操縦が可能であることを確認しました。
ロボット走行性能の検証
不整地・湾曲・段差のある管路でも、ロボットが接地面の湾曲に沿って自然と中立姿勢を保つため、左右方向の調整操作はほぼなく自律性・安定性が高いことを確認しました。

■ロボット制御システム iVoRi Box
当社製品の四足歩行ロボット制御システムiVoRi Box(アイヴォリィボックス)は、四足歩行ロボットへ連携することにより、現場作業の効率化とDXを推進します。
4K・PTZカメラやLiDARを搭載し、人やラインの追従、自律走行(LiDAR-SLAM)に対応。
LiDARセンサーアプリを活用することで、自己位置推定機能により、リアルタイム映像取得や遠隔操作を通じてロボットの場所を把握することができます。
■今後の展望
今後は、通信環境が悪い現場での無線操縦の安定化や、防水・耐熱性能の強化、打音・ズーム・360°撮像による詳細点検、AIによる異常検知など、さらなる実用化に向けた技術検証を進めていきます。

株式会社ポケット・クエリーズ
ポケクエは第一線現場をお持ちのお客様が抱える『人財不足』をテーマに技能継承/省力化/多能工化を目的とした現場向けDXツールを多く開発。またこれらの領域に、生成AI技術を活用した技術検証・実運用を実現。
本 社 :東京都新宿区西新宿3-20-2 東京オペラシティタワー35F
代表者 :代表取締役社長 佐々木 宣彦
事業内容:ロボティクス/IoT事業,VR/AR/MRの実用アプリケーション開発,3D-CG事業
HP :http://quantize-world.com/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
