【東大発AIベンチャー】製造・物流現場における運搬業務を自動化、人と協働するロボットを開発
最先端のAI・ロボティクスの技術を活用したソリューション提供を行うTRUST SMITH株式会社(本社:東京都文京区、代表: 大澤 琢真)は、自動搬送ロボット(以下AGV)を開発した。本技術により、製造・物流現場における人手不足の解消、運搬業務の効率化、作業者の負担軽減に貢献する。
- 開発の背景

品質検査や仕分けの自動化などは進んでいるものの、運搬作業は未だに人手に頼っている現場が多く、作業者の負担は軽減されない一方である。
そこでTRUST SMITHは自律走行するAGVを開発した。本技術により製造・物流現場における人手不足の解消、運搬業務の効率化、作業者の負担軽減に貢献する。
- AGV 概要
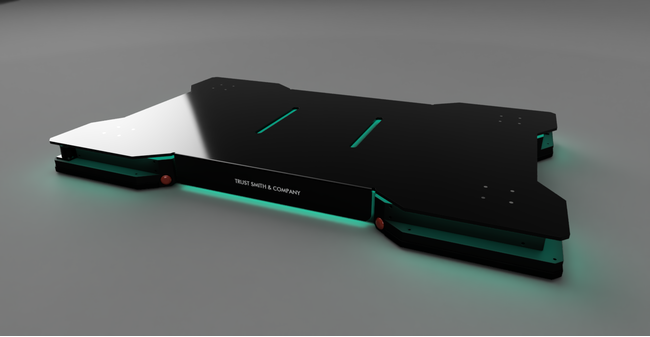
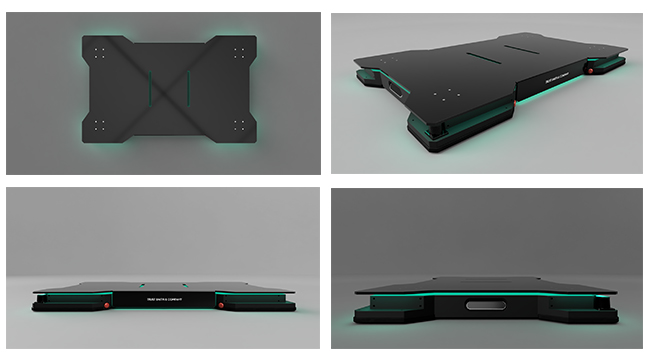
床への装飾が不要
これまでの磁気誘導式やグリッド式のAGVとは異なり、床への装飾が必要ないため、工場のレイアウト変更に柔軟な対応ができる。
あらゆる大きさ・形状・重量に対応可能
写真の機体における想定ユースケースは、縦横1m前後の荷物が積まれたパレットを運搬することだが、ユースケースに合わせてハードウェア (機体本体) の設計、ソフトウェアの設計など全てオーダーメイドで開発が可能である。
- 技術について
本AGVはそれらの技術を活かしており、具体的には以下のような特徴を持つ。
①自律走行
センサから取得した情報を元に自身で地図を生成する。自己位置を常に把握しており、指示もしくはシステムとして事前に登録することで、目的地までの最適な経路を生成する。
②障害物回避
床に段差や障害物がある場合はセンサーで検知し、自ら判断して避けることが可能。
人が歩いている空間においても運搬業務を行うことができ、「人と協働するロボット」としてデザインされている。
- 今後の展望

アームロボットやAGF、WMS、FMSなどあらゆる機器やシステムと連携することで次世代工場・倉庫の実現に向けて、今後さらに研究開発に力を入れていく。
■TRUST SMITHについて

ハード・ソフト問わず、様々な技術領域において自社製品の研究開発に取り組むとともに、オーダーメイドで企業様の課題に合わせたソリューションの提供や研究のご支援を行っています。
■TRUST SMITH 会社概要
社名:TRUST SMITH株式会社
所在地:東京都文京区本郷4丁目1-1 菊花ビル7F
代表:大澤 琢真
事業内容:数理・物理アルゴリズム(AI)の開発
設立日:2019年1月18日
会社HP:https://www.trustsmith.net/
連絡先メールアドレス:office@trustsmith.net
<関連プレスリリース>
・【TRUST SMITH株式会社】東京大学 小野晋太郎 特任准教授と学術指導契約を締結し、トレーラーの自動運転の研究開発を開始
https://prtimes.jp/main/html/rd/p/000000030.000049040.html
・東大発のAIベンチャーが、人工知能を使った障害物回避型アームのアルゴリズム開発に成功
https://prtimes.jp/main/html/rd/p/000000008.000049040.html
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
