FullDepthの遠隔操縦・自動航行・水中計測技術等を活用し、AUV等による洋上風力発電設備の無人点検に向けた実証試験を実施
-内閣府総合海洋政策推進事務局委託事業 「自律型無人探査機(AUV)利用実証事業」-
株式会社FullDepth(代表取締役社長 吉賀智司、以下FullDepth)は、東洋エンジニアリング株式会社(代表取締役社長 細井栄治、以下TOYO)、日鉄エンジニアリング株式会社(代表取締役社長 石倭行人、以下NSE)、沖電気工業株式会社(代表取締役社長 森孝廣、以下OKI)と共同で、AUV*1(自律型無人探査機)等を活用した洋上風力発電設備の水中点検作業の無人化に向けた実証試験を実施しました。
実証試験は、FullDepth製の遠隔操縦技術や自動航行機能を搭載したROV*2 (遠隔操作型無人潜水機)、当社のパートナー企業である株式会社エイトノット(所在地:大阪府堺市、代表取締役:木村裕人)所有のASV*3 (自律型海洋無人機)、当社の共同研究先である東京大学生産技術研究所巻研究室*4所有のAUVを組み合わせ、OKI所有のバージ船において、浮体式洋上風力発電設備の水中部点検を想定して行いました。
実証試験を通じて当社は、AUVやROV、ASVを活用した洋上風力発電設備の水中部点検における現在地を示すとともに、これらを活用して同設備の水中点検を無人化するための技術・運用課題を抽出し、AUV等の社会実装に向けた具体的な将来展望を提案しました。なお、本事業は内閣府総合海洋政策推進事務局の「自律型無人探査機(AUV)利用実証事業」への採択を受けて実施しました。
■ 実証試験の概要
2025年10月に静岡県沼津市でROV、ASV、AUVを組み合わせた実証試験を行い、観測対象*5の水中部に対して映像やソーナー(音波による探知)を用いた点検作業を実施しました。実証試験を通じて、洋上風力発電設備の水中点検作業の自律化と無人化に向けた技術的・運用的な課題(海底部の点検方法・運用体制など)を抽出しました。なお、本実証試験の詳細に関しては、こちらのPR動画をご覧ください。
実証試験PR動画:実証試験の背景、試験の様子、試験結果などをご覧いただけます。
■ AUV社会実装に向けたロードマップの提案
実証試験で明らかになった課題を踏まえ、より効率的かつ低コストでの洋上風力発電設備の水中部点検作業の実施を目的として、2030年および2040年に想定される水中点検システムの将来像を検討しました。具体的には、ASVとAUVを組み合わせることで、広範囲の点検作業を自律的かつ無人で行うシステム構成など、AUV等海洋ロボティクスの最適配置を意識した検討を行いました。あわせて、継続的な技術開発や検証、長期実装試験の実施など、AUV等の2030年早期社会実装に向けて必要となるマイルストーンを整理し、ロードマップとして提案しました。
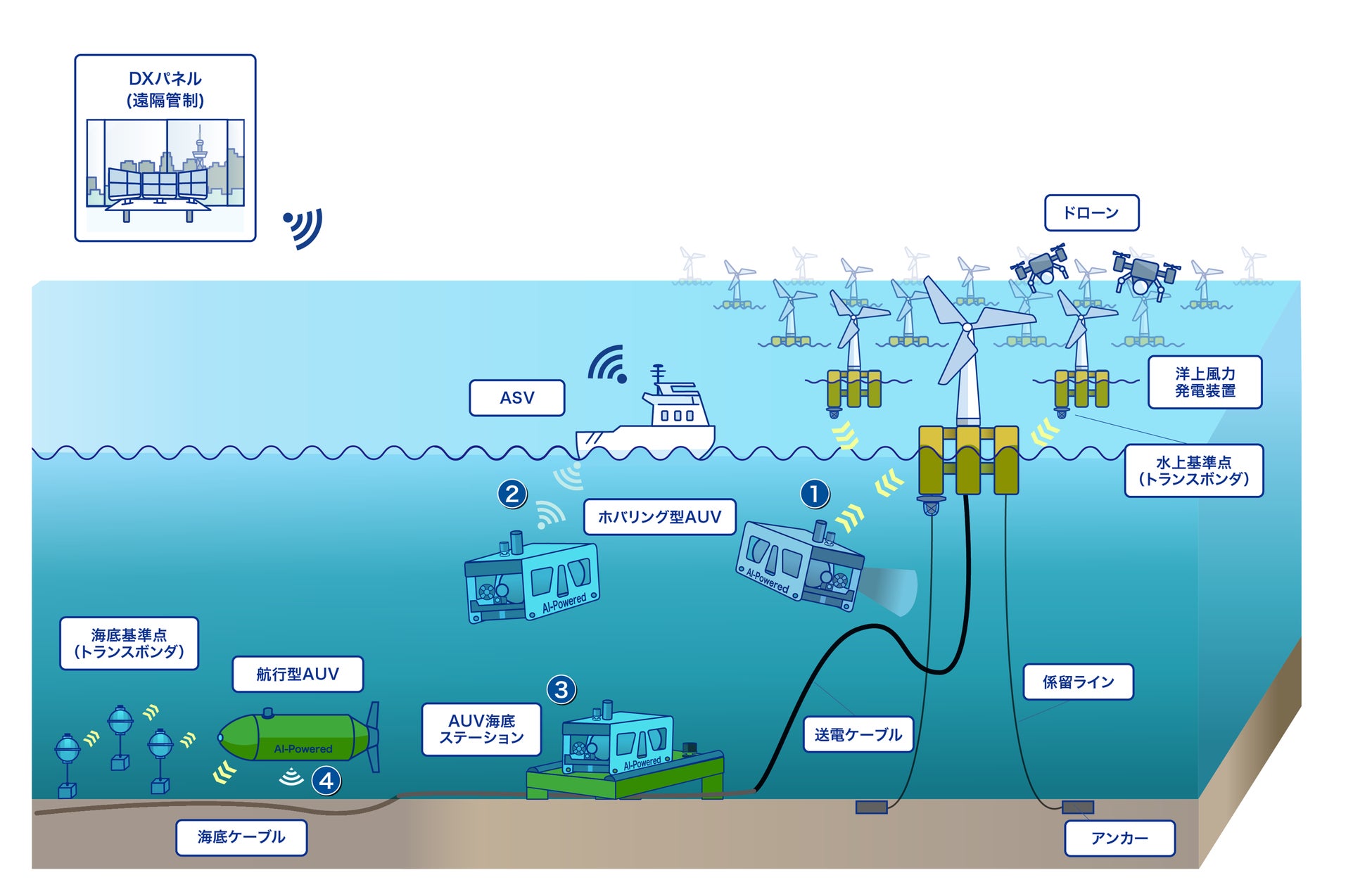
2040年に想定されるAUV等海洋ロボティクスを活用した点検システムの将来像
-
ホバリング型AUVは水上基準点の測位支援により水中自己位置を把握し、係留ライン、送電ケーブルなどの点検作業を行う。ASVはAUVが収集したデータを水中通信により受信し、DXパネルへ送信する。
-
AUVは自身のバッテリー残量が低下すると、自律的に海底ステーションへ移動し、充電やデータ通信を行う。
-
航行型AUVは海底基準点の測位支援により水中自己位置を把握し、ソーナー等を用いて海底ケーブルの状態を点検する。
【FullDepthの主な取り組み】
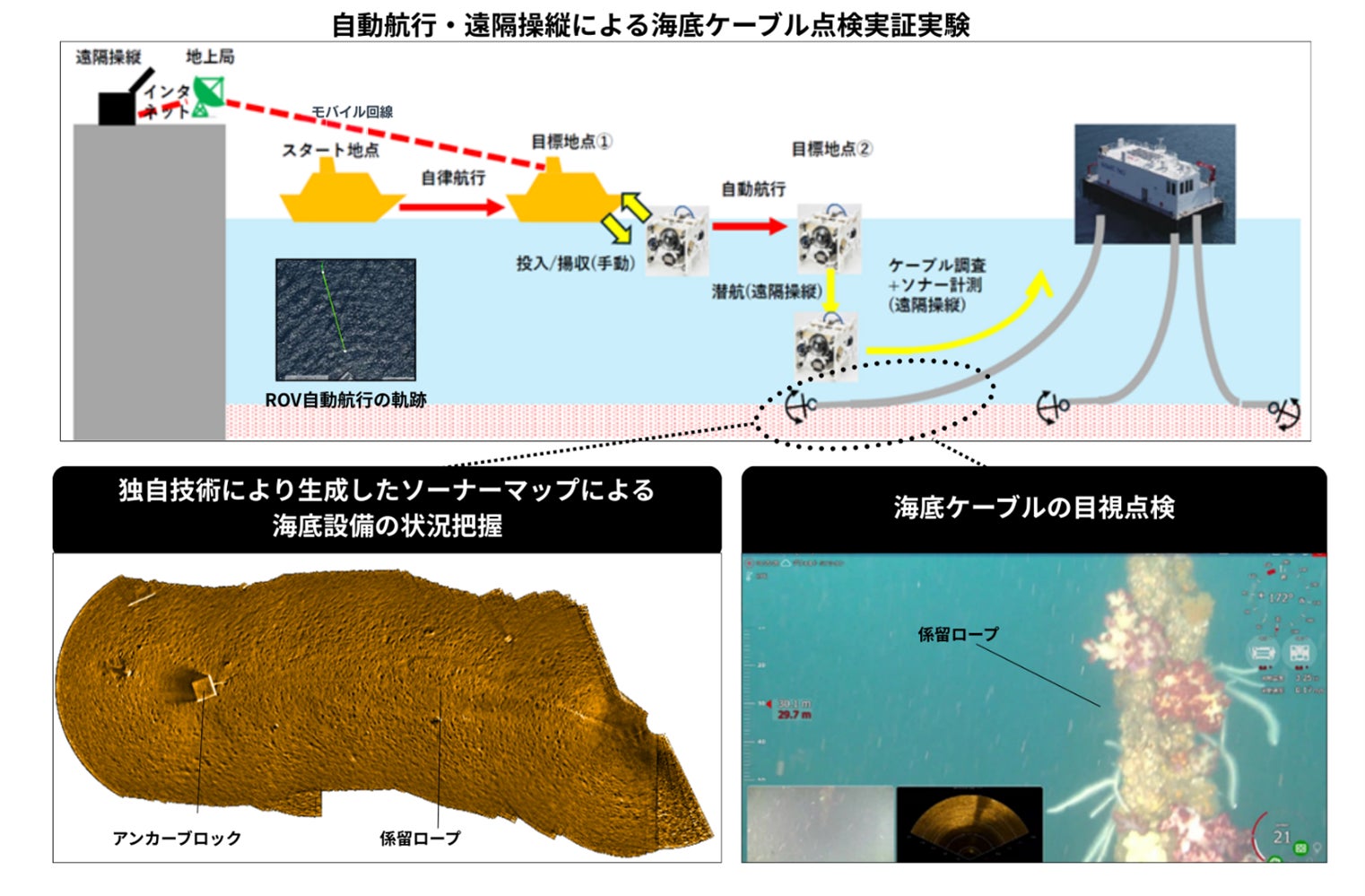
■ 自動航行可能ROVとASVを組み合わせた実証試験
自動航行可能なROVとASVにより目標地点まで移動。遠隔操縦に切り替えてROV搭載カメラとソーナーを用いた係留ライン、海底ケーブルの点検を実施。特に海底ケーブル点検では独自技術を活用したソーナーマッピングにより、海底ケーブルおよびアンカーブロックの状況把握を実施しました。
【使用機材】
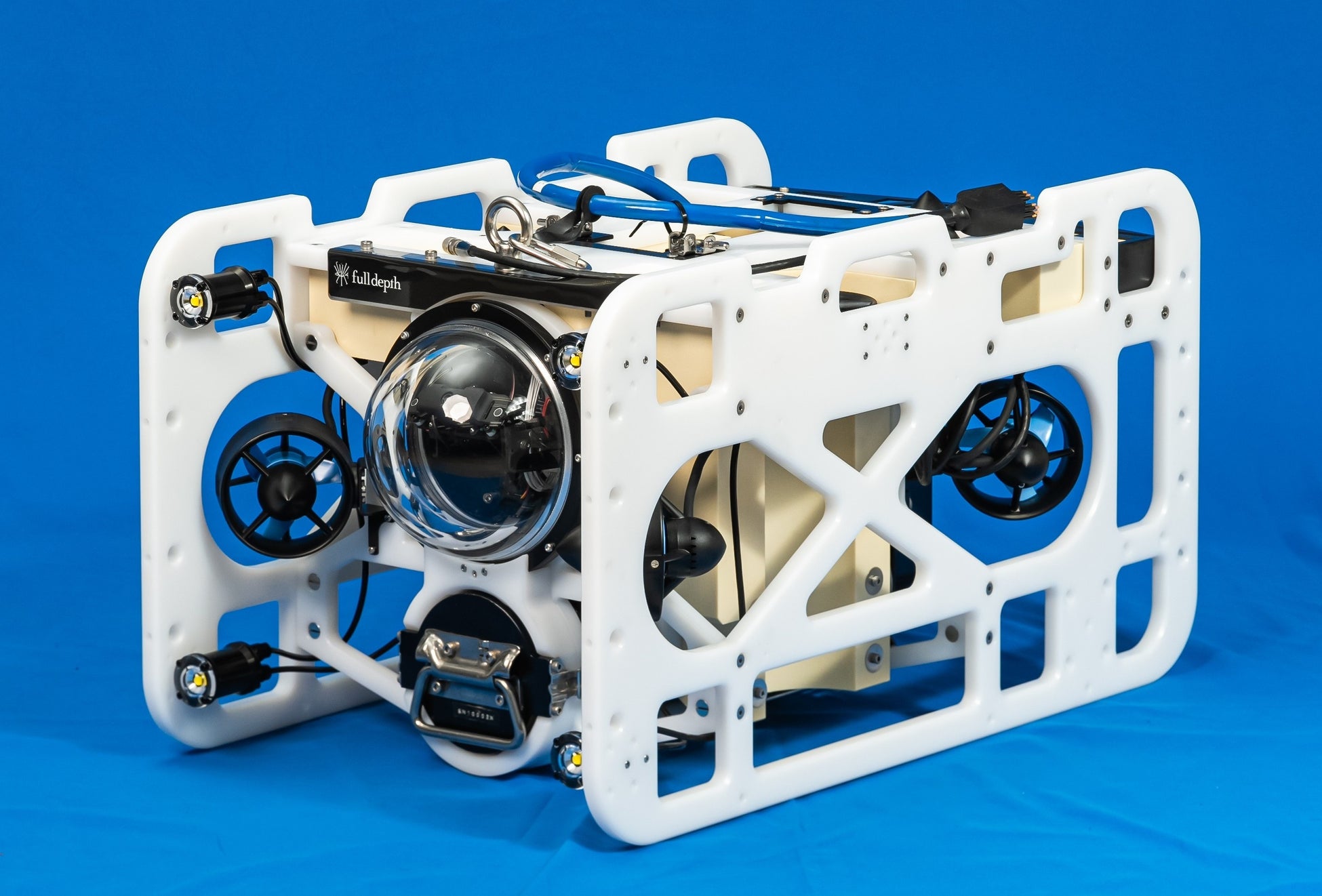

ROV「DiveUnit300 Lite」(FullDepth製) ASV「Eight Knot Ⅰ」(エイトノット所有)
【試験手順と成果】
1. ASVの自律航行で目的地点①に移動
2. ROVを投入し、GNSSによる自動航行を遠隔で指示して目的地②に移動
3. ROVを遠隔手動操縦に切り替え、海底ケーブルの目視点検、ソーナーマッピングによる点検を実施
■ 自律追従機能を持つAUVを使った実証試験(東京大学生産技術研究所)
自律制御によりケーブル追従機能を有するAUVを用いて、自律でのケーブルの撮影、3次元座標データの取得を実施しました。本AUVの運用およびデータ解析は東京大学生産技術研究所巻研究室が担当しました。
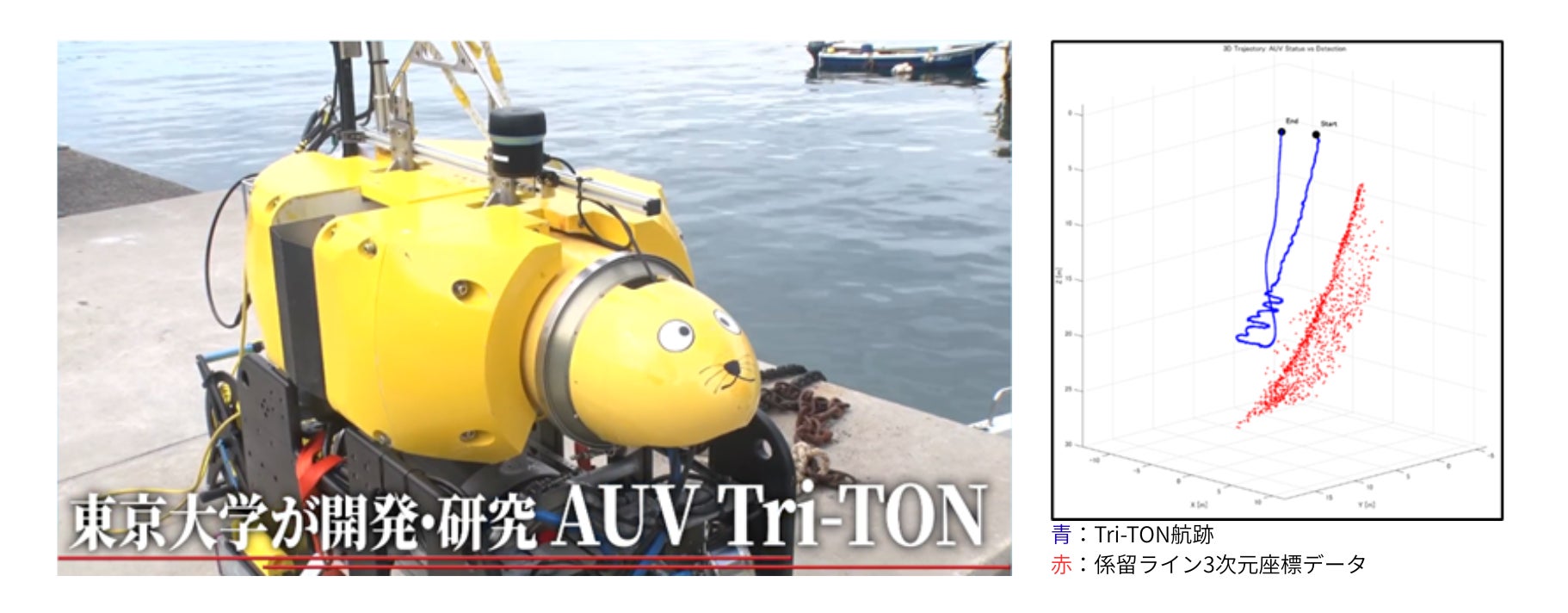
AUV「Tri-TON」(東京大学生産技術研究所巻研究室所有) ケーブルの3次元座標データ
■ 今後の展望
FullDepthは2030年ごろのAUV等の社会実装を見据え、洋上風力発電事業を対象としたAUVやAUVを用いたデータ取得技術の開発により、海洋データ利活用基盤の構築など、海洋産業における新たな価値創造を目指していきます。
【参考情報】
■ 実施体制
本事業は、下記の通り4社で共同実施しました。各社が主として担当した内容の詳細は、各社のプレスリリースにてご確認ください。

|
TOYO (プレスリリース) |
・事業全体取り纏め ・社会実装に向けた各種課題の取り纏めとロードマップの作成 ・サービスプロバイダ、海洋データ利活用基盤の検討 |
|
NSE (お知らせ) |
・実証試験の取り纏め ・AUV等海洋ロボティクスの社会実装に向けた運用的課題の整理 ・サービスプロバイダ、海洋データ利活用基盤の検討 |
|
FullDepth (プレスリリース) |
・ROV「DiveUnit 300 Lite」の提供・運用 ・AUV等海洋ロボティクス開発における技術的課題の整理 |
|
OKI (ニュースレター) |
・実証試験対象である固定式計測バージ「SEATEC NEO」の提供・運用 ・水中インフラ開発における技術的課題の整理 |
■ 注釈
*1 AUV(Autonomous Underwater Vehicle):人間の指示に依らず、自律して動く無人潜水機のこと。本実証試験では、東京大学生産技術研究所巻研究室で開発された「Tri-TON」を使用しました。
*2 ROV(Remotely Operated Vehicle):遠隔操作により水中を潜行する無人潜水機のこと。本実証試験では、FullDepth製の「DiveUnit300 Lite」を使用しました。
*3 ASV(Autonomous Surface Vehicle):自律制御により水上を航行する無人機のこと。本実証試験では、株式会社エイトノットが開発した自律航行プラットフォーム「エイトノット AI CAPTAIN」を搭載した小型船舶「Eight Knot Ⅰ」を使用しました。
*4東京大学生産技術研究所巻研究室との共同研究(期間:2022年4月1日~2026年3月31日)
*5 観測対象:本実証試験では、OKIが所有する固定式計測バージ「SEATEC NEO」の水中部を観測対象としました。
===関連する情報はこちらから===
・内閣府AUV利用実証事業について
HP:https://www8.cao.go.jp/ocean/policies/auv/auv_pilot_project/pilot_index.html
・実証事業採択時のニュースリリース(2025年 7月17日)
内閣府が公募した「自律型無人探査機(AUV)利用実証事業」に採択
~自律型海洋無人機(ASV)・遠隔操作型無人潜水機(ROV)を用いた利用実証事業を行います~
https://prtimes.jp/main/html/rd/p/000000180.000107878.html
===
【株式会社FullDepthについて】
株式会社FullDepthは2014年に設立した筑波大学発のスタートアップ企業であり、深海探査向けに確立した水中ドローンの技術をベースに、インフラ点検や水難救助などの過酷な現場で役に立つプロダクトへと進化させることで水中ロボティクス技術の社会実装を行っております。本年より国産水中ドローン「DiveUnit」シリーズに独自開発の機体制御技術や水中計測技術を搭載して、水中の状況を3Dで捉えることができる「水中3D撮影サービス」を提供開始するなど、水中のデジタル化に向けたソリューションの開発・ご提供に取り組んでおります。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像