人機一体 × 椿本チエインが共同開発を進める、高耐衝撃性を実現する新世代電動シリンダ『人機並進駆動ユニット ver.6.0』を 2025 国際ロボット展にて初公開
過負荷を受け流し、自動的に復帰する独自の緩衝機構「人機インパクトフォースリミッタ」を実装し、油圧電動化の実現に向けた、高耐衝撃性を示す体験型展示を実施。

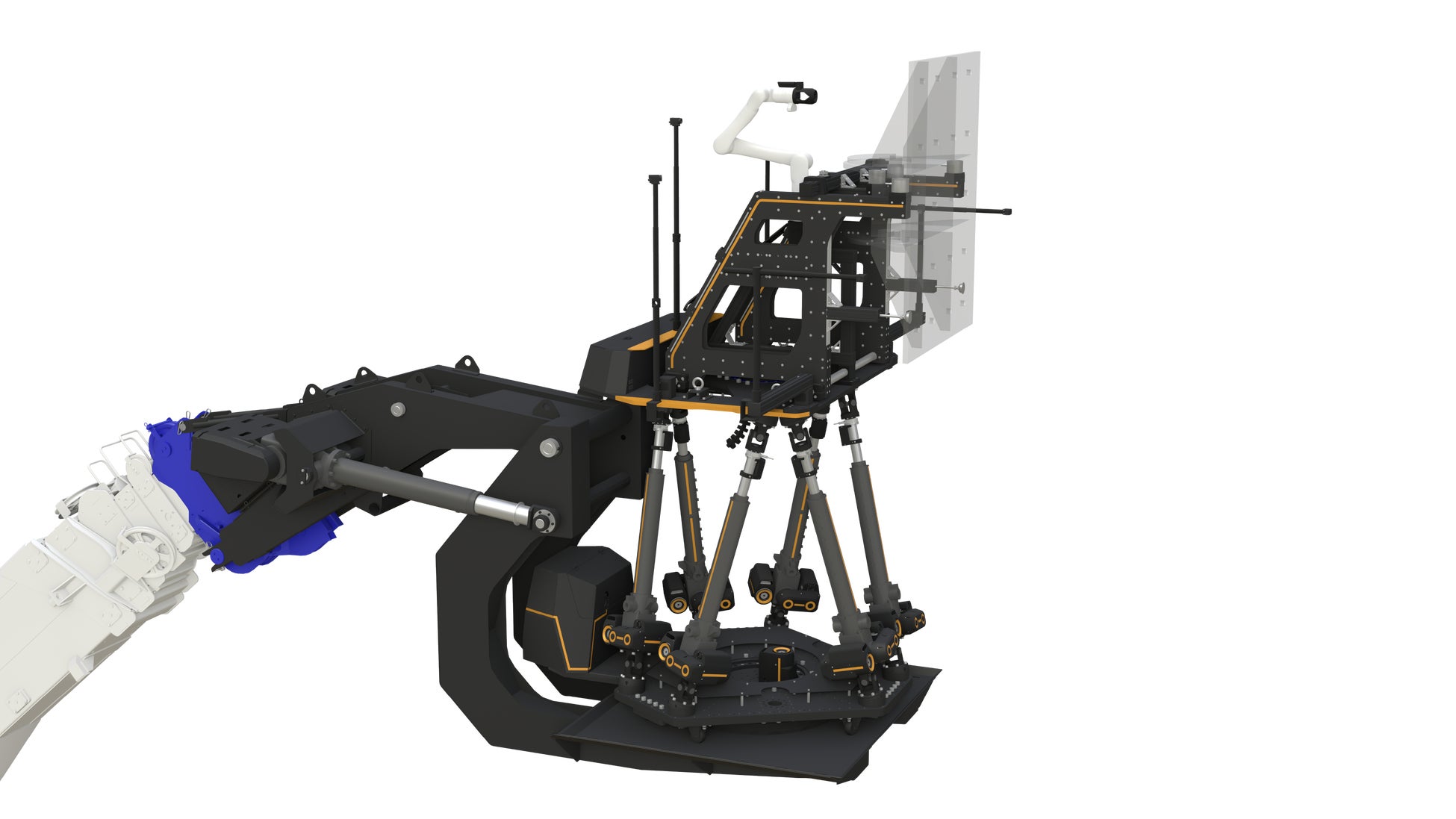
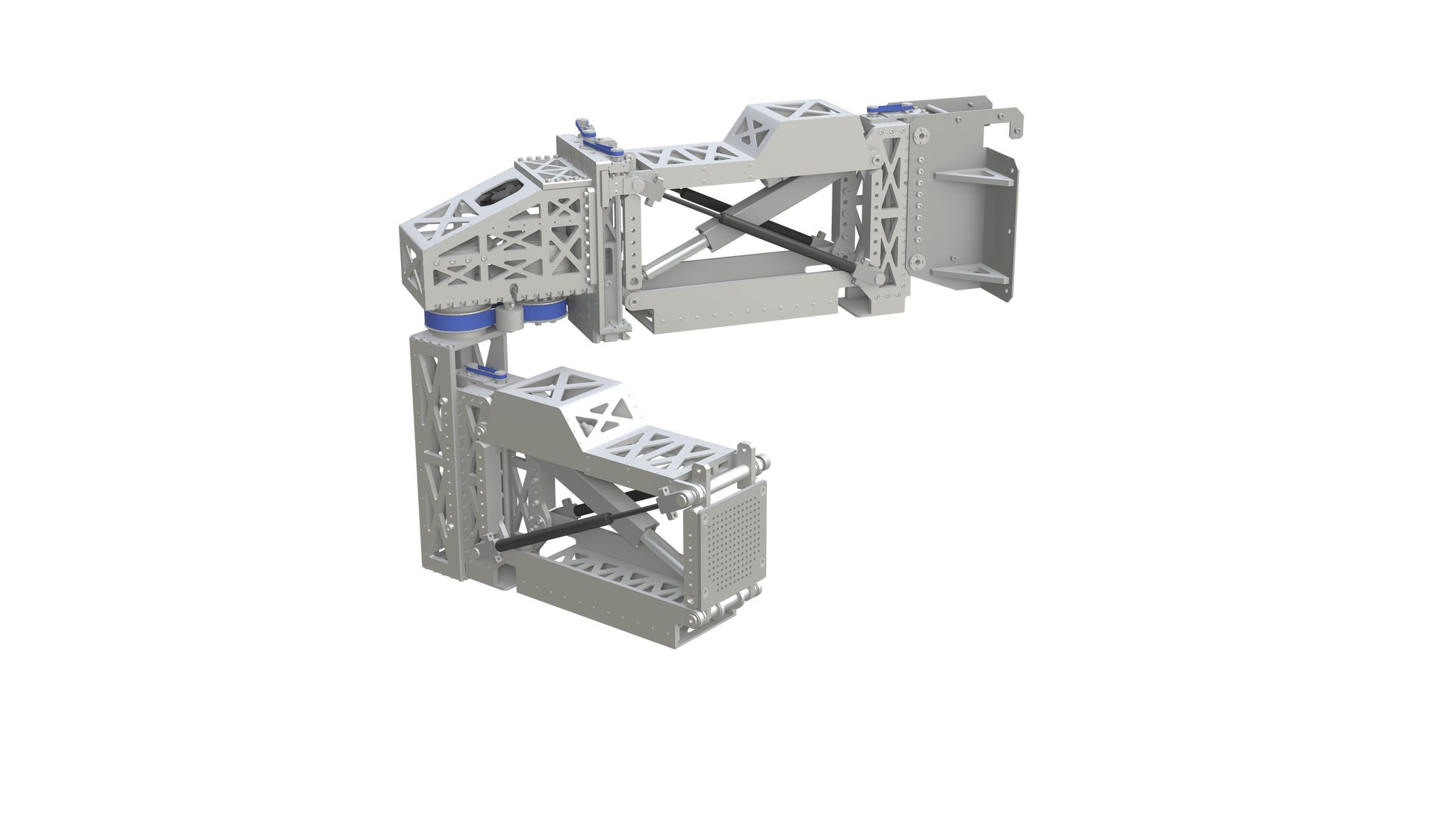
先端ロボット工学技術の社会実装を目指す株式会社人機一体(本社:滋賀県草津市、代表取締役社長:金岡博士、以下「人機一体」)は、株式会社椿本チエイン(本社:大阪市北区、代表取締役社長:木村 隆利、以下「椿本チエイン」)との事業連携による成果として、高出力・高耐衝撃性を備えた電動シリンダの PoC(※1)試作機「人機並進駆動ユニット ver.6.0」を開発いたしました。
人機並進駆動ユニット ver.6.0 は、2025 国際ロボット展(以下、iREX2025)にて初公開となり、当該試作機を搭載したショベルアームにより、高耐衝撃性を示す体験型展示を実施いたします。
※1 PoC = Proof of Concept、概念実証
■ 開発背景とこれまでの取組
油圧代替としての電動シリンダへの期待
現在、ショベルやクレーンをはじめとした重機(建設機械)には油圧シリンダが搭載されています。油圧シリンダを用いた重機は、電動シリンダを用いた重機と比較して大きな出力を発揮することができ、高い耐衝撃性を持ちます。しかし、油圧機構の仕組上、緻密な力加減を要するような繊細な作業には不向きとされています。また、 ESG(環境・社会・企業統治)の観点から油圧作動時の騒音や油漏れのリスクなど環境負荷の低減に向けた意識が高まっています。
日本国内においては、国土交通省による GX(グリーン・トランスフォーメーション)建設機械認定制度の開始に伴い、重機メーカにおいても重機の電動化に向けた取組が活発化しており、油圧代替としての電動シリンダへの期待が高まりつつあります。
これまでの研究開発の取組
人機一体は、高出力・高耐衝撃性を備えた力制御電動シリンダの社会実装を目指して独自に開発を開始しました。2022 年 07 月からは人機一体による知的財産活用サービス「人機プラットフォーム」の一つ「PF03 人機並進駆動ユニット社会実装プラットフォーム」に椿本チエインが製品化企業として参画。
前回の 2023 国際ロボット展(iREX2023)では、1.5 トンの推力を有しながら、重量約 14 kg (ストローク 500 mm)に軽量化し、大幅なパワーウエイトレシオの改善を実現した人機並進駆動ユニット ver.5.0 を展示しました。

■「人機並進駆動ユニット ver.6.0」の概要
独自の緩衝機構「人機インパクトフォースリミッタ ver.5.0(人機 IFL ver.5.0)」の実装
制御では反応できない外部からの急激かつ大きな衝撃に対して、機械的に当該衝撃を緩衝可能な機構として人機一体独自の過負荷保護装置「人機インパクトフォースリミッタ ver.5.0(以下「人機 IFL ver.5.0」)」を開発し、人機並進駆動ユニット ver.6.0 に実装しています。
人機 IFL ver.5.0 と独自の力制御技術「プロクシベースト・アドミタンス制御」による耐衝撃性の向上
電動シリンダの内部機構を破壊するような外部からの急激かつ大きな衝撃が加わった場合には、人機 IFL ver.5.0 が初動の衝撃を緩和し、初動以降の衝撃振動に対しては、人機一体独自の力制御技術である「プロクシベースト・アドミタンス制御(PBAC)」によるバーチャルクラッチで処理することで高帯域における耐衝撃性の向上を実現しました。これにより、ハードウェア、ソフトウェアの両面から高い耐衝撃性を実現し、シリンダを構成するボールねじや減速機、力センサ、モータ等を保護します。
人機並進駆動ユニット ver.6.0 では、1.5 トンの推力やパワーウエイトレシオ(重量/出力)の低さといった人機並進駆動ユニット ver.5.0 の性能をそのままに、耐衝撃性を高めることで、電動シリンダによる油圧代替に向けた性能向上を実現しました。
■ iREX2025 での展示内容
本展示では、パワーショベルのアーム部分の電動シリンダとして人機並進駆動ユニット ver.6.0 を搭載し、バイラテラル制御での高い衝撃性を示す体験展示を実施します。
■ 今後の展望
独自ロボットへの適用
超重量物のハンドリング作業の機械化を目的として竹中土木と共同開発中の PoC 試作機「人機スチュワートプラットフォーム ver.2.0」や平行リンク構造を採用した可変減速関節ユニットの原理検証のための PoC 試作機「人機パラレルリンクユニット ver.2.0」、重量物対応全方向移動台車の PoC 試作機「人機カート ver.3.0」などの独自ロボットへ適用していくことで性能を高めつつ市場を創出し、製品としての社会実装を目指します。


産業機械・ファクトリーオートメーション(FA)分野への展開
人機一体のロボットや重機の電動化の分野に留まらず、人機並進駆動ユニット ver.6.0 の特性を活かし、以下のような幅広い分野におけるニーズへの展開を検討してまいります。

|
分野 |
展開概要 |
展開例 |
|---|---|---|
|
自動組立機器 |
位置決めだけでは困難な、微妙な力加減を要する組立作業の自動化に貢献。 |
・シャフト、ベアリングの圧入作業 |
|
検査装置・測定装置 |
正確な荷重制御により、試験対象を破損させることなく高精度な検査を実現。 |
・材料の圧縮試験、耐久試験 |
|
切削・研磨・バリ取り装置 |
対象物の形状にならう柔軟な押し付け動作により、加工品質の均一化を実現。 |
・砥石の押し付け圧一定化による研磨品質の向上 |
|
アシスト装置 |
力に対して柔軟に応答する特性(バックドライバビリティ)と高い安全性を活かし、人や環境と接する分野へ応用。 |
・リハビリテーションにおける力のアシスト |
■ 参考情報
・関連プレスリリース(2022 年 03 月 16 日)
【告知】新明工業 × 椿本チエイン × タダノ × 人機一体 の4社による「人機プラットフォーム」を活用した力制御電動シリンダ「人機並進駆動ユニット」開発プロジェクトが始動します | 人機一体
・関連プレスリリース(2023 年 12 月 06 日)
株式会社人機一体は、油圧シリンダの代替を可能とする力制御電動シリンダの PoC 試作機「人機並進駆動ユニット ver.5.0」を 2023 国際ロボット展にて初公開しました | 人機一体
■ 2025 国際ロボット展 (iREX2025)概要
|
会期 |
2025 年 12 月 03 日(水)〜 06 日(土) |
|
会場 |
東京ビッグサイト ※人機一体ブースは東 7 ホール内、E7-61 です。 |
|
主催 |
一般社団法人 日本ロボット工業会、日刊工業新聞社 |
⇒ 詳細は主催者サイトをご覧ください。
■ 会社概要
株式会社人機一体
代表者 :金岡博士(Dr. KANAOKA)
所在地 :滋賀県草津市青地町648番地1
拠 点 :福島県南相馬市原町区萱浜字巣掛場45番地245
南相馬市産業創造センター
創 立 :2007 年 10 月 01 日
創 業 :2015 年 10 月 01 日(現商号への変更日)
資本金 :1 億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス

このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- イベント
- ビジネスカテゴリ
- 電子部品・半導体・電気機器建設・土木
- ダウンロード
