動きを見るだけで筋肉と神経が分かる ロボティクスから生まれた世界一詳細な人体モデルを開発【産技助成Vol.72】
独立行政法人新エネルギー・産業技術総合開発機構
東京大学大学院情報理工学系研究科
医療、スポーツ科学分野における人間の運動の高精度解析を可能とするため
モーションキャプチャで運動を計測し、全身の筋肉と神経の情報を推定することにより
神経筋疾患の診断やそのリハビリテーションを支援する画期的な新システムを開発。
東京大学大学院情報理工学系研究科
医療、スポーツ科学分野における人間の運動の高精度解析を可能とするため
モーションキャプチャで運動を計測し、全身の筋肉と神経の情報を推定することにより
神経筋疾患の診断やそのリハビリテーションを支援する画期的な新システムを開発。
独立行政法人新エネルギー・産業技術総合開発機構(NEDO技術開発機構)の産業技術研究助成事業(予算規模:約50億円)の一環として、東京大学の准教授、山根 克氏は、モーションキャプチャでの運動計測の結果から全身筋と神経情報を推定し、神経筋疾患の診断とリハビリテーションの支援を可能にする画期的新システムを開発しました。
本技術は、小型光学式モーションキャプチャシステムを用いた低侵襲運動計測技術により、155関節、997本の筋と運動神経ネットワークからなる世界一詳細な画期的人体モデルを高速に構築できる、ロボティクス理論(注1)の最新研究を応用した高速動力学計算法です。
従来から行われてきている医師の経験に頼った神経筋疾患の診断を、運動計測と高速計算技術による解析により迅速かつ正確、定量的に実現します。これにより医師でも適切な治療をすばやく実施でき、同時に治療効果が短期間で評価できるようにし、患者のQOL(注2)の向上につながります。本人体モデルは神経内科の医師やスポーツ科学、モデル同定の専門家等との共同研究チームで開発しており、神経医学やスポーツ科学の知見を取り入れて開発しました。
また、スポーツ分野へ応用すれば、身体や筋の状態、上級者と初級者の違いが明確に認識できるため、的確なトレーニングを実施することが可能となります。
(注1)ロボットに関する技術を研究する学問、理論。
(注2)Quality of Lifeの略。人が人らしい生活を送ることが出来ているかを計るための尺度。
1.研究成果概要
本研究では神経筋骨格モデルと動力学計算法、低侵襲運動計測技術、低侵襲パラメータ同定手法といった基盤技術を開発するとともに、医療・リハビリテーションへ応用するための神経筋疾患診断支援システムとリハビリテーション支援システムの構築を行いました。
神経筋骨格モデルと動力学計算法では、筋−骨の干渉(注3)やバーチャルリンク位置最適化(注4)において改良を加え、また、筋張力推定アルゴリズム(注5)は筋の生理学的特性を導入して改良することにより、世界一詳細な人体モデルを実現しました。低侵襲運動計測技術(注6)では、超広角レンズを使用することで狭い部屋でもセットアップが容易となり、また、メッシュマーカを使うことで、突起がなく安全で、形状の同時計測が可能な非侵襲計測を実現しました。
患者個人の特性に合った治療を行うためには,モデルのパラメータを患者に合わせて容易に調整できる必要があります。このため,身長・体重など身体の数か所の計測データにより骨格の運動学パラメータを同定する方法,神経内科の臨床診断と同様の試験をすることで関節粘弾性パラメータを同定する方法などを開発しました。
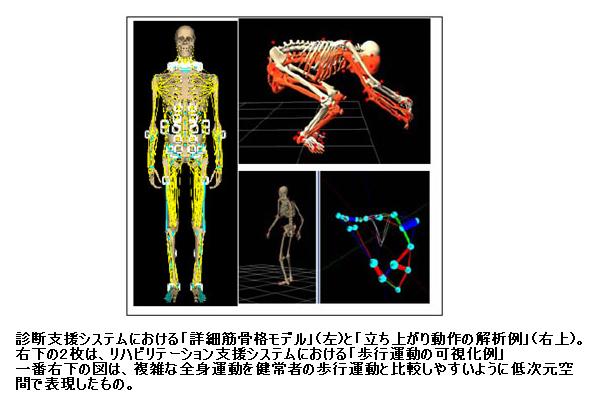
これら結果に基づき開発した神経筋疾患診断支援システムは、運動全体と筋活動を可視化、複数の被験者や動作を同時に表示したり、解析したい部位や必要な精度に応じて筋骨格モデルを切り替えたりできます。またリハビリテーション支援システムは、健常者の標準運動をデータベースとし神経疾患患者の運動をマッピングし、全身運動の異常箇所や疾患箇所(健常者の運動との違い)を可視化できます。
(注3)筋−骨の干渉とは、関節の運動に伴い、筋が骨に巻きついて経路が変化することを言う。従来のモデルでは考慮されていないことが多かった。
(注4)バーチャルリンク位置最適化とは、筋・腱の分岐をモデル化するために導入された要素のこと。通常は独立な2本の筋とし
て簡略化される。
(注5)筋張力推定アルゴリズムとは、モーションキャプチャにより計測された運動を実現するために各筋が発揮しなければならない張力を推定するアルゴリズムのこと。
(注6)低侵襲運動計測技術とは、光学式モーションキャプチャのように運動に与える影響がほとんどない運動計測技術のこと。
2.競合技術への強み
1)世界最高の解析精度:155自由度の骨格モデル、筋997本、腱50本、靱帯117本の筋−腱ネットワーク、脊髄~筋の神経ネットワークをモデル化した神経筋骨格モデルにより、世界最高の解析精度を実現しました。
2)計測の事前準備が容易:超広角レンズとメッシュマーカ(注7)を使用し、光学式モーションキャプチャで撮影・計測できるため、狭い部屋でもセットアップが容易にできるシステムです。
3)低コスト:従来の神経筋骨格モデルに比べ、コストが約10分の1以下に低減しました。
(注7) メッシュマーカ:反射素材をメッシュ状に配置することで、従来の球状マーカに比べて10倍程度の計測点のデータを得ることができるマーカ。
3.今後の展望
今後、基盤技術となる神経筋骨格モデルについては、触覚や視覚などの感覚を運動制御機構へフィードバックするモデルを導入することで、より高次な神経疾患への応用を可能にしていきます。また低侵襲運動計測技術については、システムの小型化とリアルタイム化を図り、低侵襲パラメータ同定手法については医用画像の併用をしていきたいと考えています。
企業との連携で共同開発したバイオメカニクス用動作解析ソフトウェアを2008年末に一般販売する予定です。
4.参考
成果プレスダイジェスト:東京大学准教授 山根 克氏
すべての画像