研究開発用台車ロボットのROS 2サンプルを追加
SLAMや自律移動のサンプルを追加し、ROS 2をさらに容易に活用可能に
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、自社製研究開発用台車ロボット向けに公開しているROS 2対応サンプルについて、さらなる追加を行いました。
■主な特徴
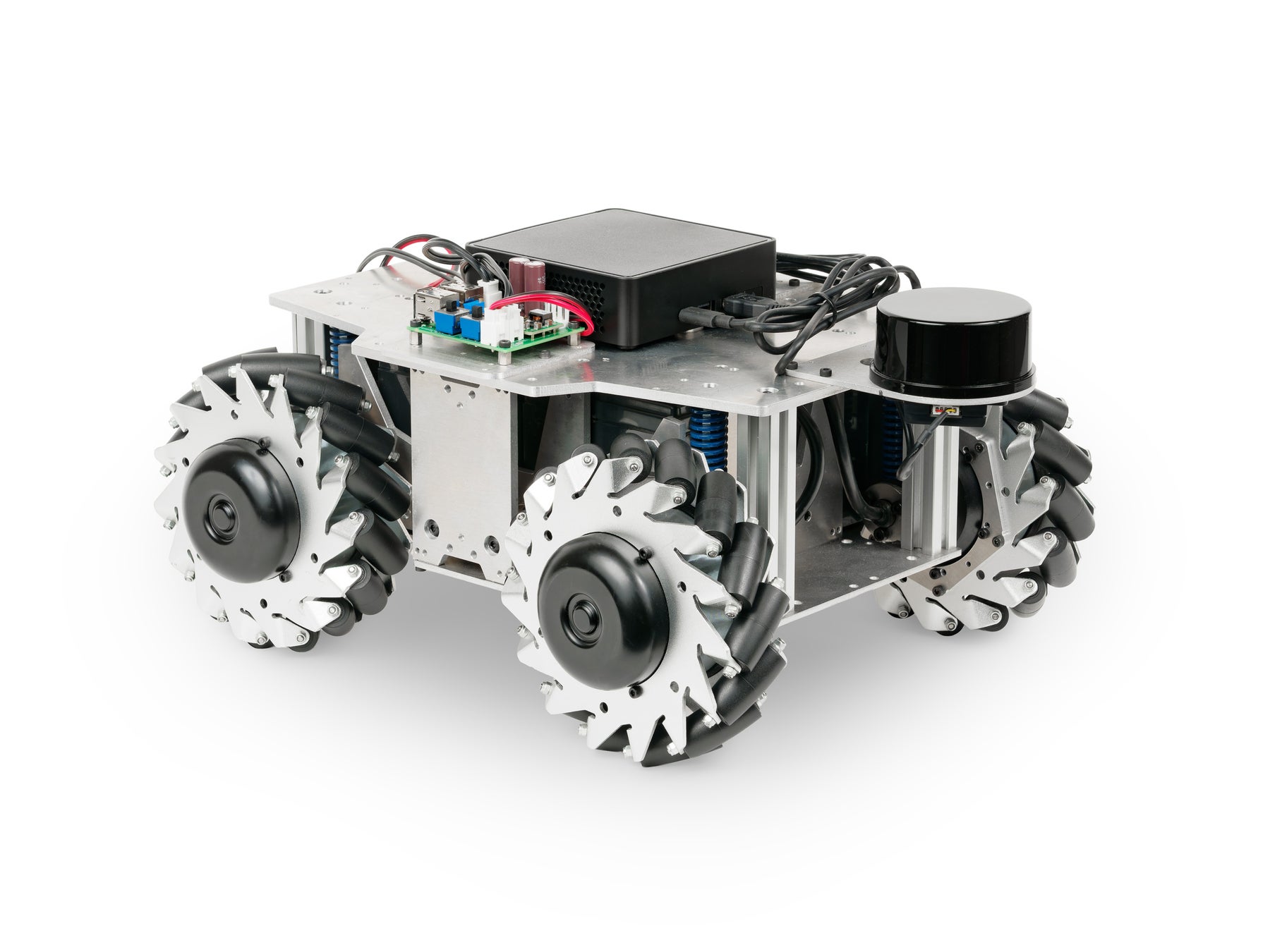
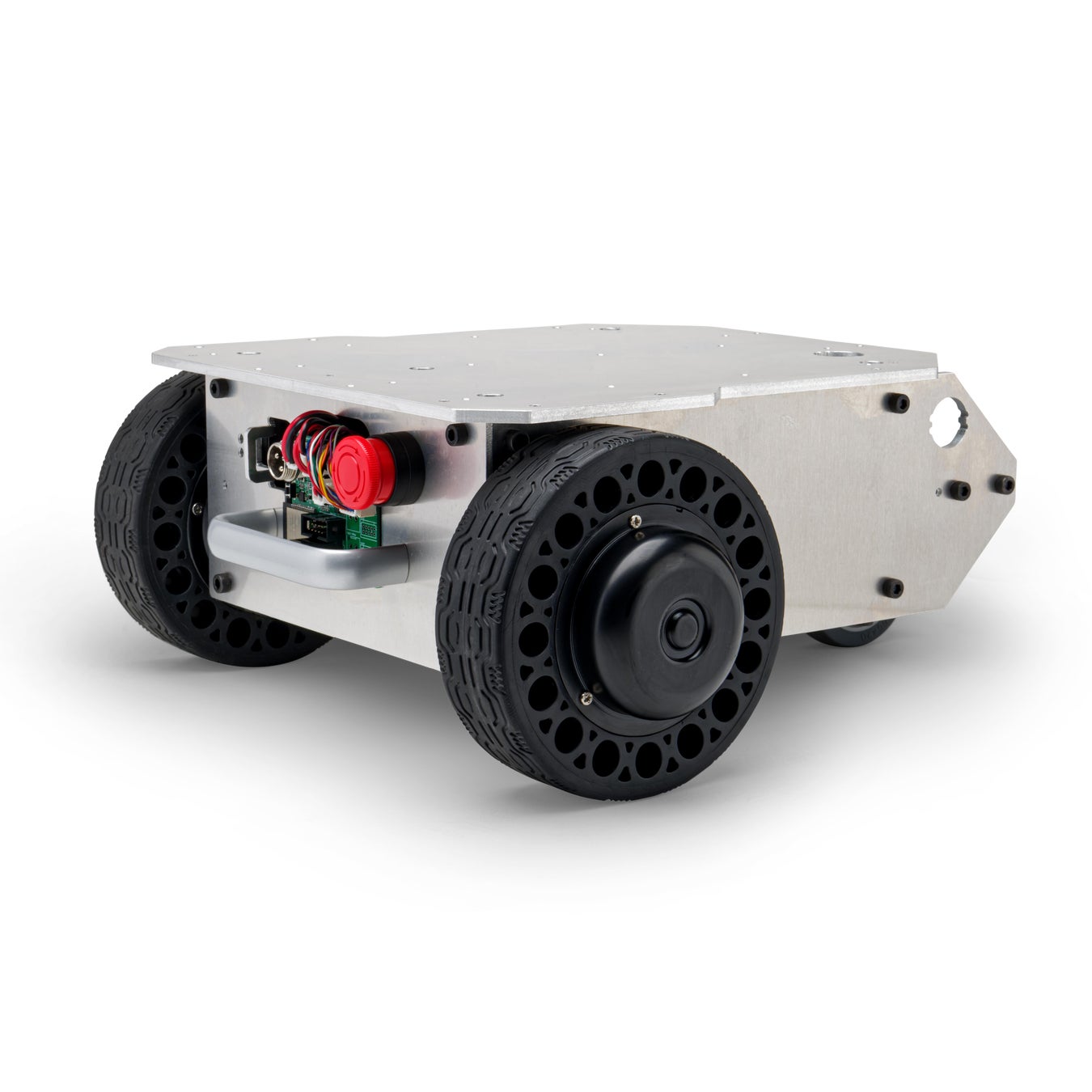
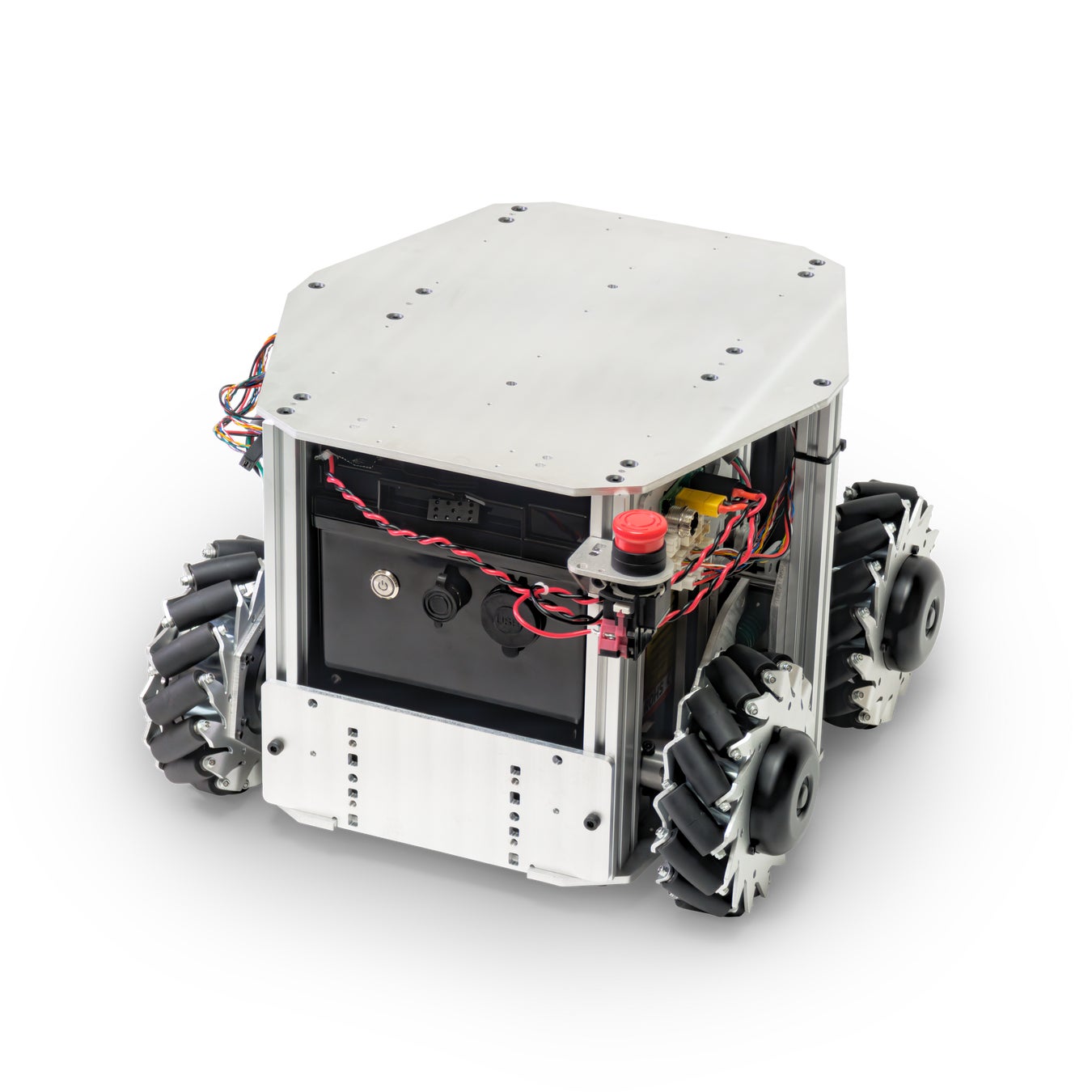
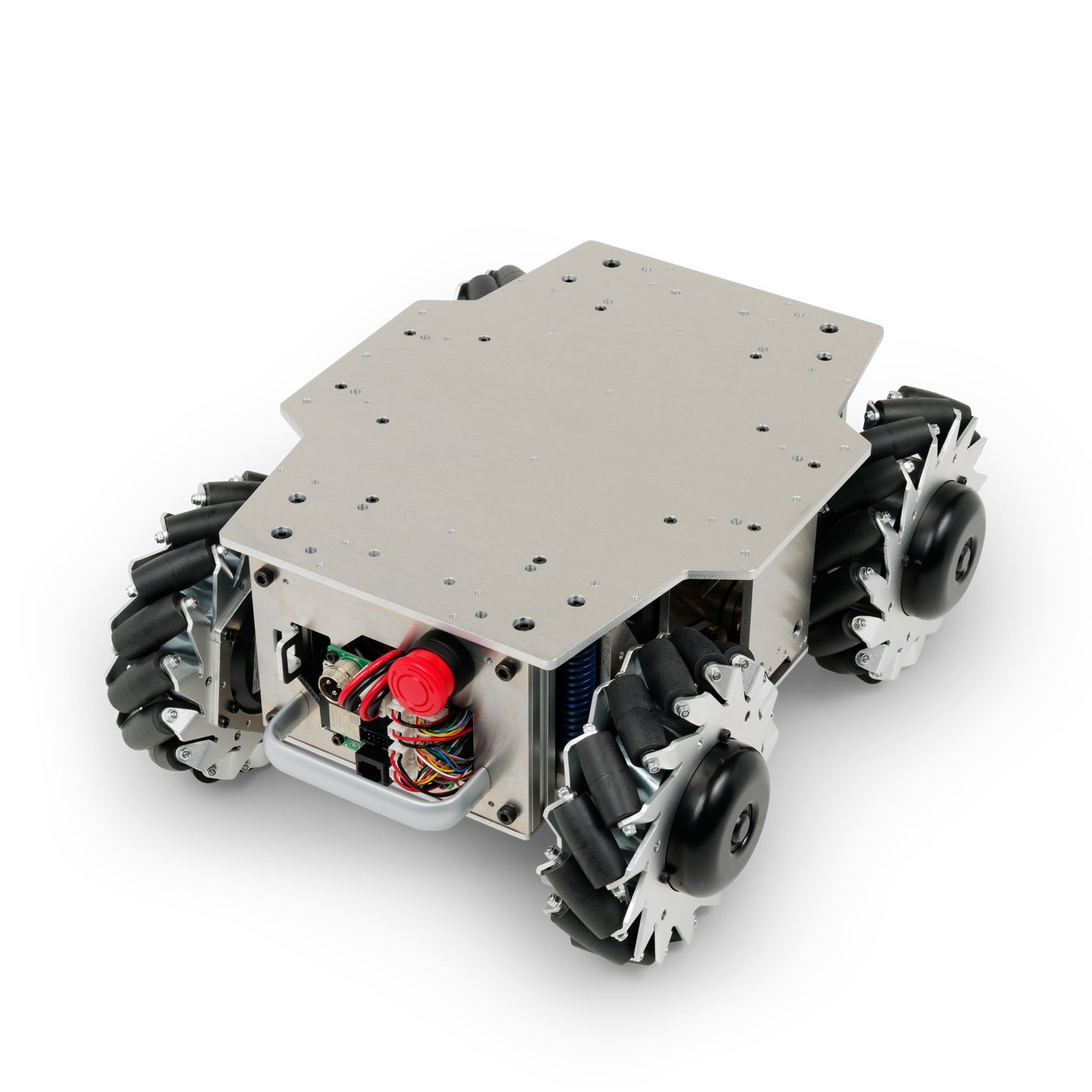
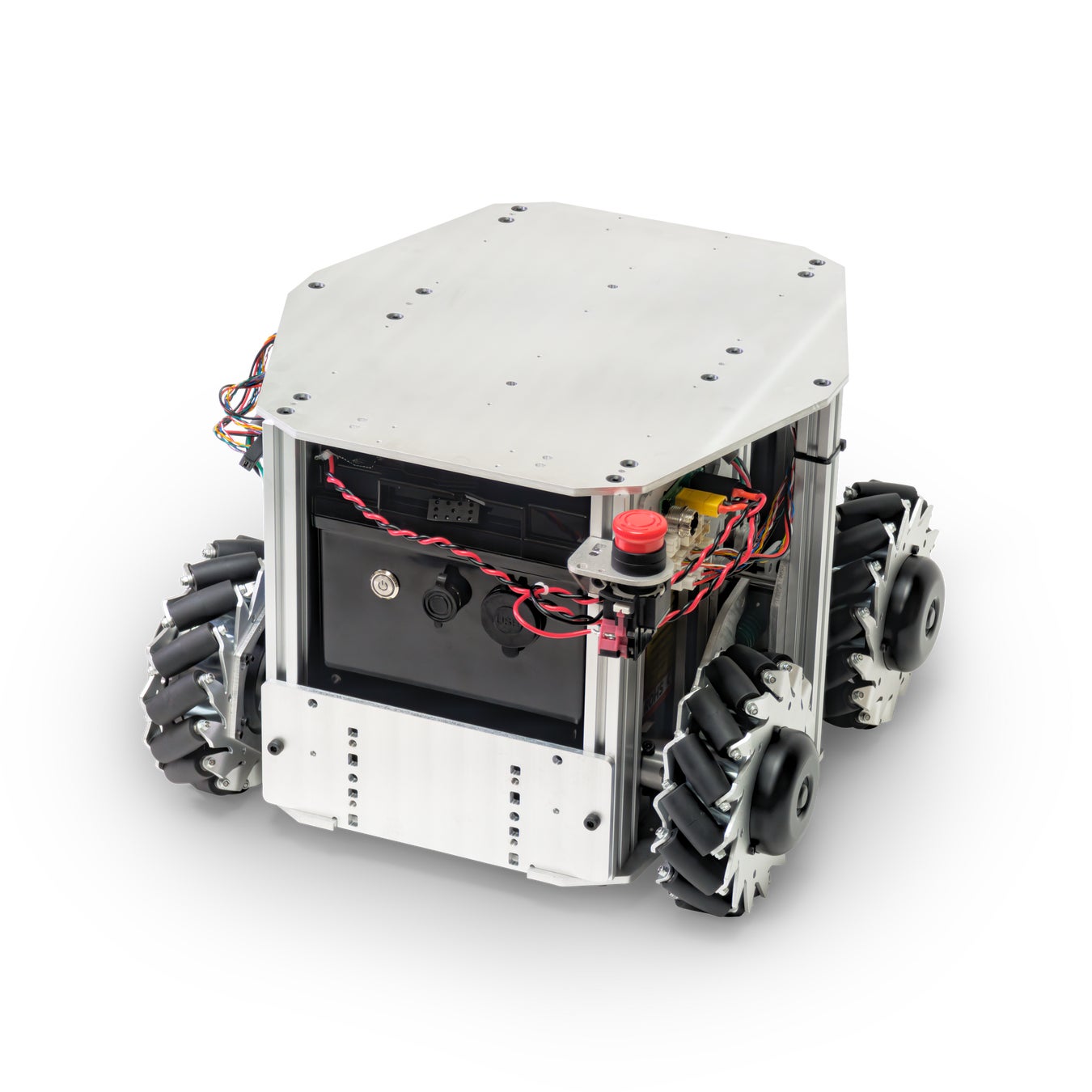
ヴイストン株式会社製の研究開発用台車ロボットシリーズは、さまざまな分野の研究・開発用途に対して利用可能なロボットプラットフォームです。車輪の駆動方式や可搬重量が異なる多彩な本体ラインナップを用意しているほか、Arduino IDE対応の本体制御基板、ROS 2に対応するオプションデバイス、各種のセンサーオプションなどが特徴で、目的に合わせた自由な開発が可能です。
今回追加したROS 2用サンプルは、ROS 2を導入した研究開発用台車ロボットで利用可能です。すでに公開済みのサンプルに加えて、SLAMによる地図作成や自律移動を行うサンプルを提供するもので、ユーザーであれば無償で導入が可能です。
台車ロボットを用いた研究・開発においては、ROS 2の効果的な活用がますます一般化しています。ヴイストン株式会社においては、本サンプルの公開によって、研究開発用台車ロボットの導入および活用のハードルを下げると共に、製品の可用性を高め、研究開発における製品のパフォーマンスをさらに向上させることを目指しています。
(1) 追加で公開したサンプルパッケージ
今回、以下に挙げるROS 2 Humble用のサンプルパッケージを追加で公開しました。すでに弊社製研究開発用台車ロボットにおいてROS 2 Humble用サンプルをお使いの方は、GitHubから最新版をpullすることで使用可能となります。
・SLAMによる地図作成(SLAM Toolbox使用)
・SLAMによる地図作成(gmapping使用)
・経路計画、追従および障害物回避を行う自律移動(Nav2使用)
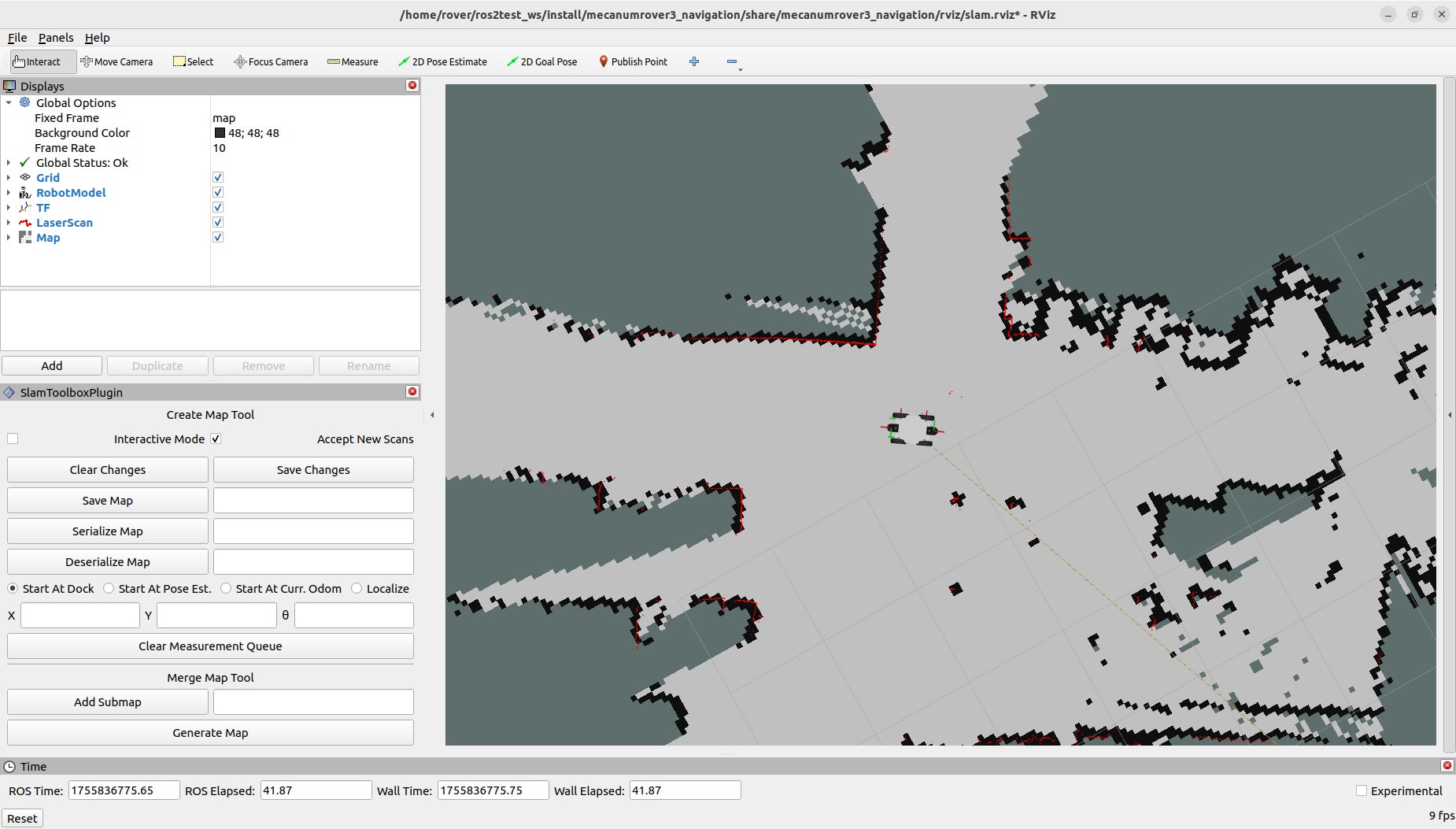
(2) SLAMサンプルについて
今回追加したSLAMサンプルでは、LiDAR(LRF)およびオドメトリ(またはLiDAR単体)からの信号に基づき、台車ロボット周辺環境の地図を作成する機能を提供します。また、台車ロボットをロボット用無線コントローラー(VS-C3)で走行させて地図を作成することが可能です。作成した地図は、下述の自律移動サンプルで利用可能です。
【その他の条件等】
・LiDARは、弊社製「LRFオプション(TG30)」の使用を想定しています
・機材の運用環境や設定によっては、地図が意図通り作成できない場合があります(保証されるものではありません)
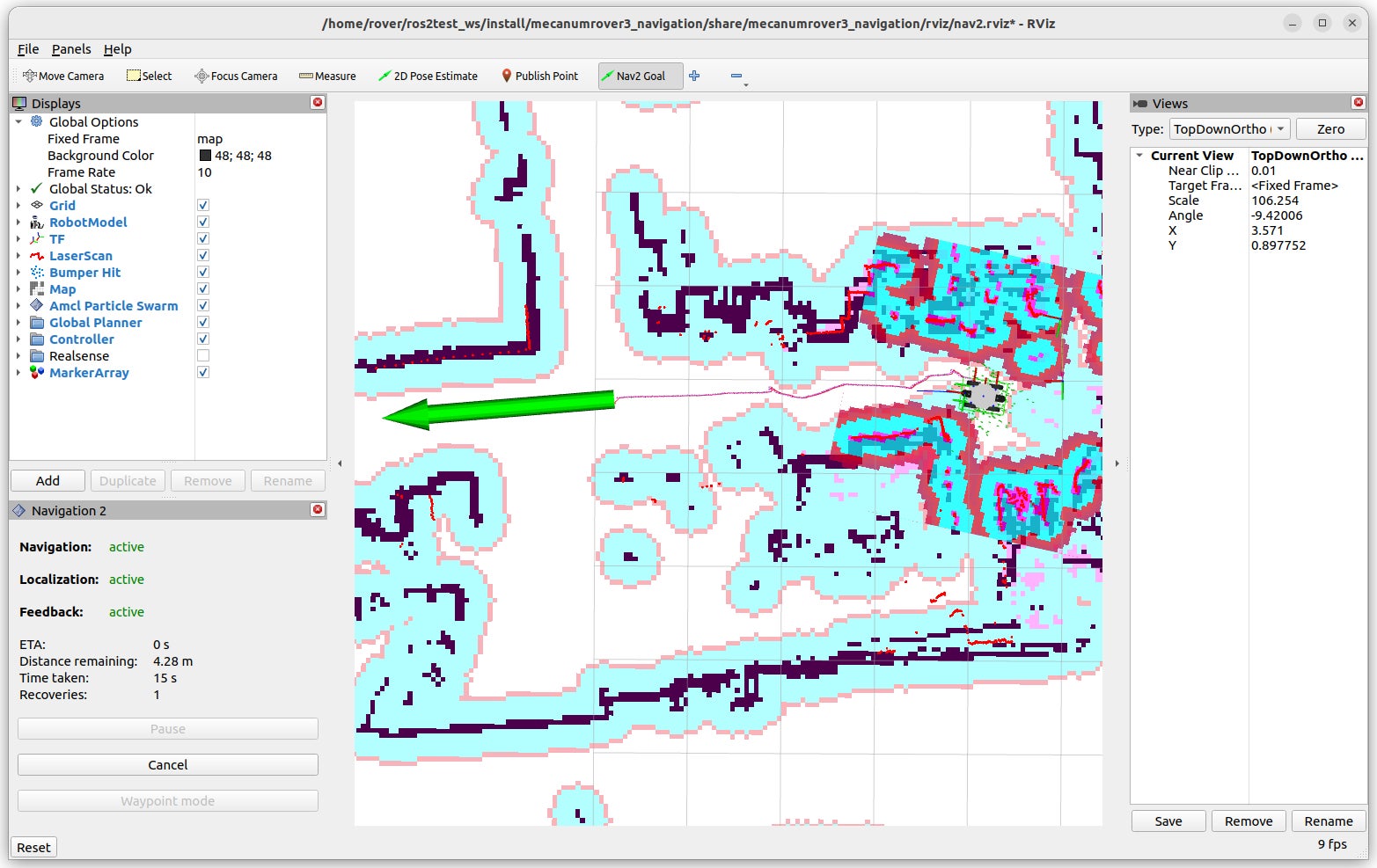
(3) 自律移動サンプルについて
今回追加した自律移動サンプルでは、LiDARおよびオドメトリの情報から自己位置推定を行いつつ、GUIで指定した地図上の目標地点に自動で移動する機能を提供します。
経路計画、経路追従を行うNav2パッケージを使用しており、各パラメーターを調整することで、台車ロボットの挙動を変化させることが可能です(ただし、パラメーターの調整はユーザー独自の開発にあたり、弊社からのサポートの対象外です)。
【その他の条件等】
・LiDARは、弊社製「LRFオプション(TG30)」の使用を想定しています
・機材の運用環境や設定によっては、台車ロボットが意図通り移動できない場合があります(保証されるものではありません)
■ROS 2使用時の推奨動作環境

|
OS |
Ubuntu 22.04(64bit) |
|
ROS |
ROS 2 Humble |
|
CPU |
Intel® Core™ Ultra 5 125H Processor |
|
RAM |
32GB |
|
ストレージ |
M.2 SSD 256GB |
|
グラフィック |
Intel® Arc™ GPU |
(※)上記条件を満たしていても、相性などにより、正常に動作しない場合があります。
(※)仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
■対応機種
今回追加したROS 2用サンプルの対象機種は以下の通りです。なお、対応機種は今後順次拡大していきます。なお、ヴイストン株式会社製の研究開発用台車ロボットにおいてROS 2を導入するにあたり、詳細情報のご確認が必要な方は、弊社の営業担当までご連絡ください。


■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
ヴイストン、Vstone、Robot Shop(ロボットショップ)は、ヴイストン株式会社の登録商標です。
Arduinoは、Arduino AGの登録商標です。
Intel、Intel Core、Intel Arcは、Intel Corporation またはその子会社の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
GitHubは、GitHub, Inc.の登録商標です。
Nav2は、Open Navigation LLCによるオープンソースのプロジェクトです。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
すべての画像
