LiDAR搭載の学習用台車ロボット ライトローバー ROS 2対応をバージョンアップ
既存ユーザーは無償でアップデートが可能
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、LiDAR(LRF)を搭載した卓上サイズのROS対応台車ロボット「ライトローバー」用について、ROS 2対応のドキュメントおよびサンプル類をLTSバージョンの最新版に更新し、無償公開しました。

■主な特徴
ヴイストン株式会社製の「ライトローバー」は、卓上での運用が可能な小型二輪台車ロボットです。高性能なLiDAR(LRF)とRaspberry Pi 4 Model B(RAM容量4GB版)を標準搭載しており、台車ロボット制御の学習用教材や開発機体として、学校や企業での学習、教育、研修、研究用途などに多く活用されています。
今回公開したROS 2対応のドキュメントおよびサンプル類は、ライトローバーのROS 2対応を最新版(LTSバージョン)に更新するものです。すでに製品をお持ちの方は無償でダウンロード・アップデートが可能です。
ヴイストン株式会社では、ロボット関連技術の研究開発や人材育成を進める上で、本製品のような学習教材が長く活用できることが極めて重要であると考えています。本アップデートの提供を通して、ロボット業界全体の人材教育、技術育成に直接的に貢献してまいります。
(1) ROS 2対応ドキュメントとパッケージを公開
ライトローバーのROS 2対応ドキュメントおよび、ROS 2に対応したパッケージは以下のURLにて公開されています。含まれるサンプルプログラムおよび、必要となる動作環境は、下記の通りです。
【公開情報】
・ ドキュメント類
https://vstoneofficial.github.io/lightrover_webdoc/
・ パッケージ等 配布URL
https://github.com/vstoneofficial/lightrover_ros2
【公開サンプルプログラム一覧】
・ ゲームパッドからの操作
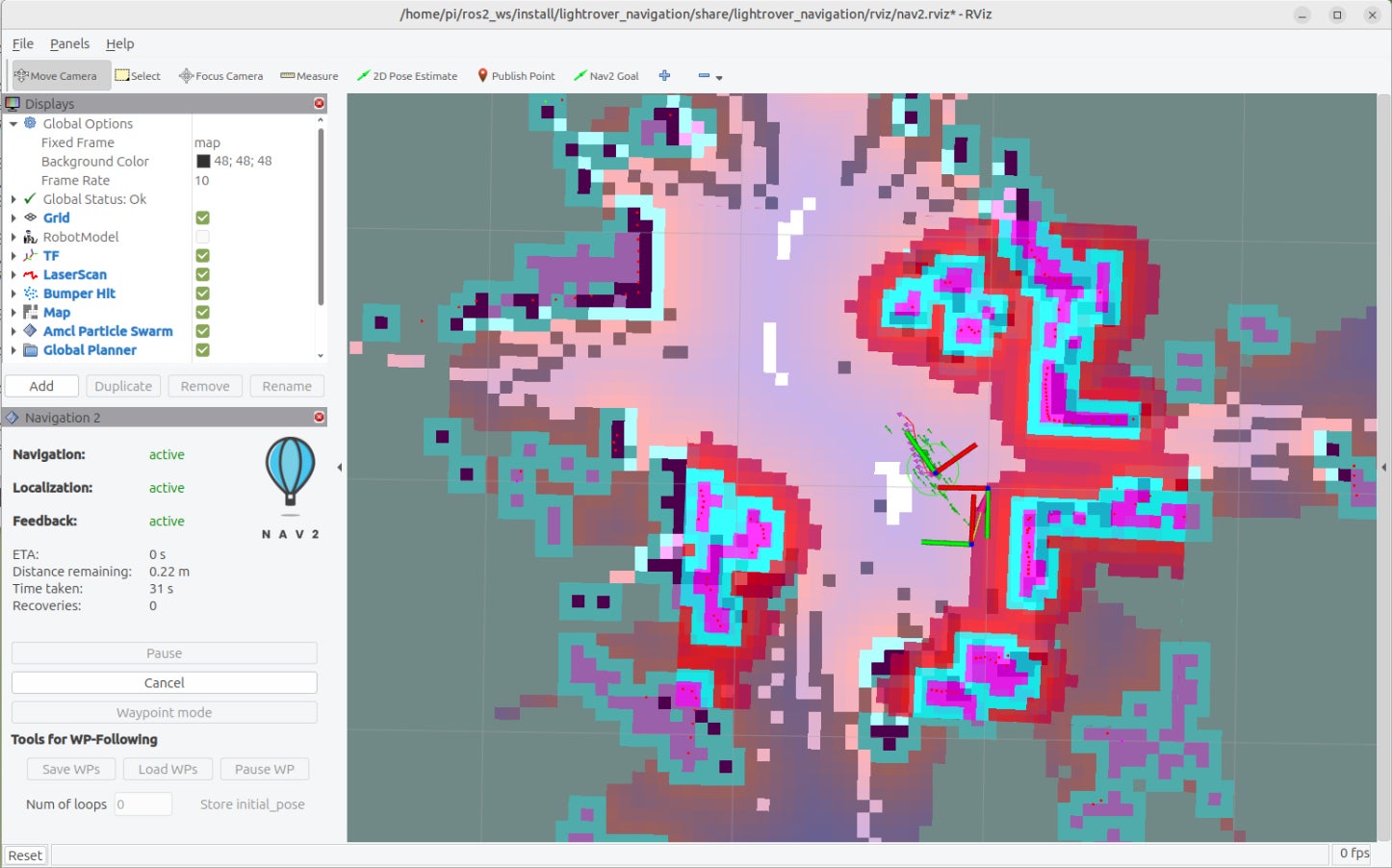
・ SLAM(slam-toolbox)
・ 自律走行(Nav2)
【動作環境】
・OS:Ubuntu MATE 24.04
・ROS:ROS2 Jazzy
(ドキュメントに従い、ライトローバー搭載のRaspberry Piにセットアップが必要です)

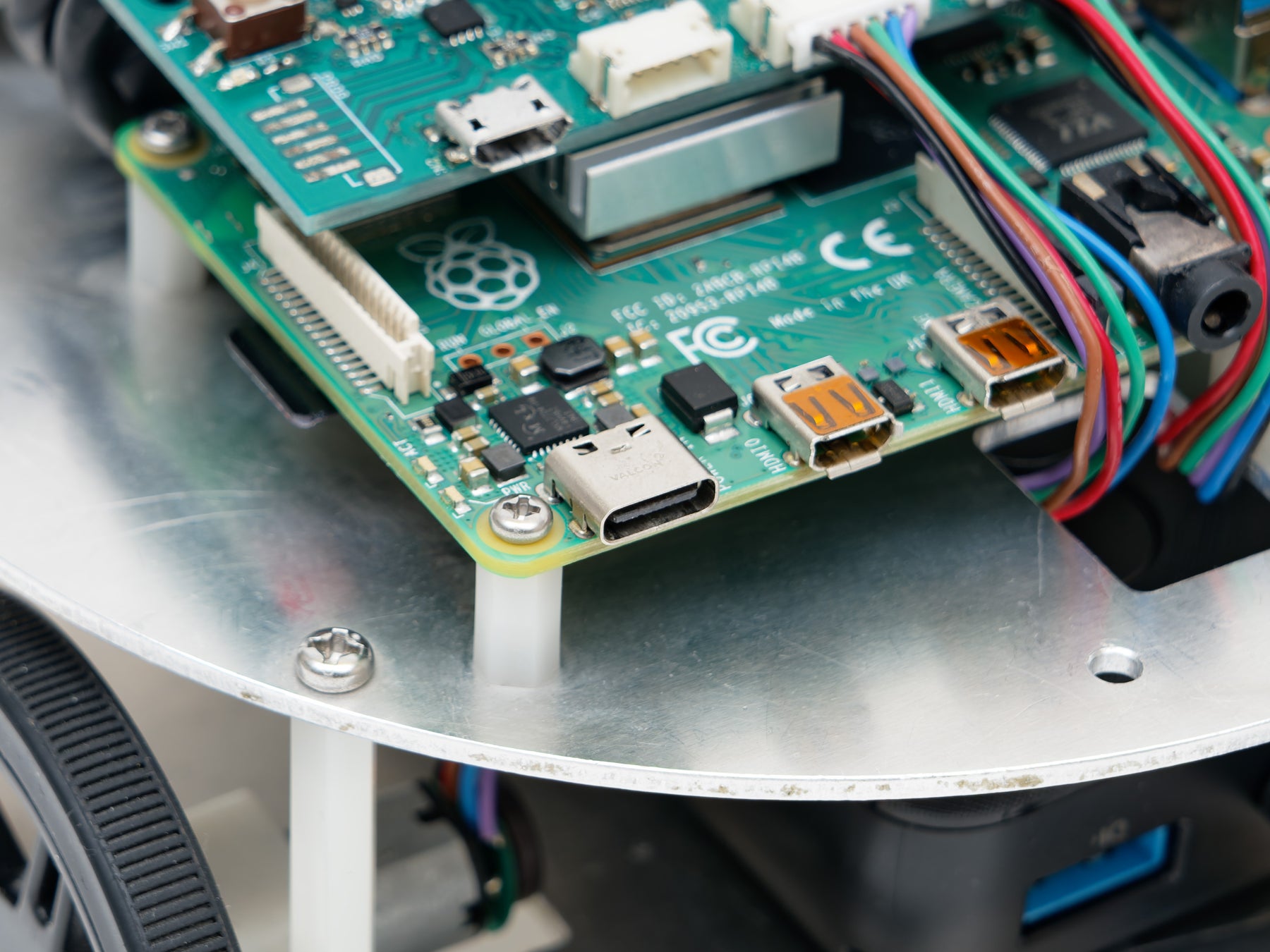
(2) Raspberry Pi 4 Model BとLiDAR(LRF)を標準搭載
ライトローバーには、小型の筐体ながら、RAM容量4GB版のRaspberry Pi 4 Model Bと小型のLiDAR(LRF)が標準搭載されています。現代的な台車ロボットの自律制御においては、以前にも増して演算能力が求められていますが、Raspberry Pi 4はそのニーズに十分に応えるプロセッシングスピードを提供します。LiDAR(LRF)は、昨今のスマートフォンや家電機器などにも搭載が進んでおり、高度化するロボティクス制御においては今後ますます重要性が増すデバイスであると考えられます。
これらのキーデバイスをコンパクトにパッケージした本製品は、自律制御の学習教材としてはもちろん、単純な台車制御という枠に留まらない全く新しいコンピューティングデバイスの創出にも繋がる、優れた教育材料であると考えています。

(3) エンコーダーによる速度制御を実現
ライトローバーに搭載される2つの駆動用モーターには、標準でエンコーダーが搭載されており、回転量を正確に取得することが可能です。モーター回転量を元にしたPID制御による速度制御などを行えるほか、オドメトリ情報に変換し、SLAMや自律走行を実行するなど、様々なアプリケーションの学習および開発が可能です。
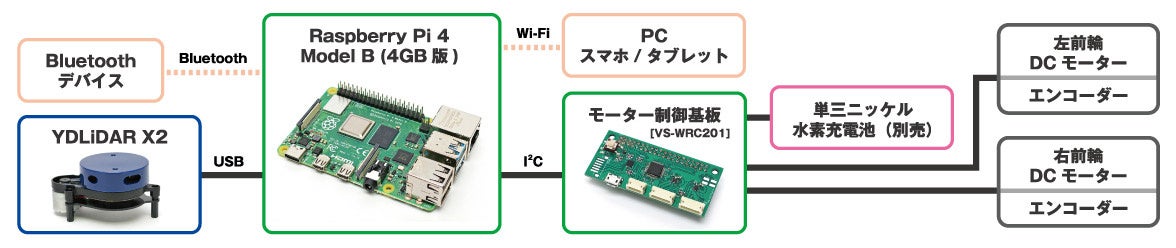
また、モーターの制御基板として「VS-WRC201」を新規開発し、エンコーダーからの出力値をRaspberry Pi 4に入力すると共に、効率の良いモーター回転制御を実現しています。
(4) 用途に合わせた給電が可能
本製品では、標準の電源として別売の単3ニッケル水素充電池を4本使用しますが、市販のモバイルバッテリー等による給電も可能です。電源口として、モーター制御基板VS-WRC201のUSB Micro-B端子、あるいはRaspberry Pi 4基板のUSB Type-C端子が使用可能で、用途やケーブルの事情に合わせて選択できる柔軟性を備えています。
なお、ROS 2環境での運用の際には、電源安定性の観点から、Raspberry Pi 4基板のUSB Type-C端子からの給電が必要です。また、本製品には、単3ニッケル水素充電池やモバイルバッテリー、ACアダプターなどは付属しません。
■構成図
■本体仕様

|
サイズ |
W160×D150×H116.8 (mm) |
|---|---|
|
本体重量 |
約516g(バッテリー含まず) |
|
本体材質 |
アルミニウム |
|
バッテリー |
単3ニッケル水素充電池×4 |
|
駆動方式 |
二輪駆動、後部ボールキャスター×1 |
|
タイヤ直径 |
駆動輪:60mm、ボールキャスター:17.5mm |
|
モーター |
DCモーター×2 |
|
回転検出 |
エンコーダー |
|
最高速度(実測値) |
0.6m/s (数値は開発時の実測で、路面状況などにより異なります) |
|
制御基板 |
Raspberry Pi 4 Model B(RAM容量4GB版)VS-WRC201 |
|
SDK |
ROSパッケージ |
|
収録サンプル (※) 本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります |
ROS用サンプルコード ゲームパッドからの操作 SLAM(slam-toolbox) 自律走行(Nav2) |
|
インターフェース |
USBシリアル、Wi-Fi、Bluetooth、I2C |
(※) 本製品にはRaspberry Pi用のmicroSDカードは付属しません。
■本製品のYouTube動画
https://www.youtube.com/watch?v=Aj4qYwBy4PY
■本製品に関連する技術情報等のYouTube動画(再生リスト)
https://www.youtube.com/watch?v=_8MTu8oMjGA&list=PLQ7S4S06Y4chwJLR85izWHmTvOQh9KBDj
■販売について
ヴイストン株式会社の公式Webショップ「ヴイストン ロボットショップ」にてご注文可能です。
・LiDAR搭載 学習用台車ロボット ライトローバー : 66,000円(10%消費税込み)
製品ページ: https://www.vstone.co.jp/products/lightrover/
販売ページ: https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&products_id=5323
■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
ヴイストン、Robot Shop(ロボットショップ)は、ヴイストン株式会社の登録商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。Bluetooth®はBluetooth SIG, Inc. USAの登録商標または商標です。Nav2は、Open Navigation LLCによるオープンソースのプロジェクトです。microSDロゴ、microSDは、SD-3C LLCの登録商標または商標です。Raspberry PiはRaspberry Pi財団の登録商標または商標です。ROSはOpen Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。Wi-FiはWi-Fi Allianceの登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
