内閣府の課題解決プログラム「BRIDGE」の2025年度研究開発事業を受託 ~公共エリアにおける自動運転の社会実装へ向けて次世代ダイナミックマップの開発を加速~
ダイナミックマッププラットフォーム株式会社(本社:東京都渋谷区、代表取締役社長CEO: 吉村 修一、以下「当社」)は、内閣府の「研究開発成果とsociety 5.0との橋渡しプログラム」、通称「BRIDGE」の施策の1つである、経済産業省による「公共エリア向けダイナミックマップの開発」の2025年度研究開発事業を受託しました。
本事業は、車の自動運転の社会実装を加速するための中核インフラとして、空港や港湾といった公共エリアに対応した高精度3次元地図(HDマップ)と、リアルタイムに変化する状況に対応するダイナミックマップを構築し、シームレスな公道への接続とグローバル展開を目指すものです。なお、当社は2023年度から本事業を受託※しており、その成果をもとに継続して実施します。
※【参考リリース】2024年1月5日「内閣府の課題解決プログラム『BRIDGE』の研究開発事業を受託」
https://www.dynamic-maps.co.jp/news/bridge/
■本事業の背景・内容
空港や港湾といった主要な物流を担う公共エリアでは、深刻な労働力不足が顕在化しており、自動運転車両などの先端技術の導入による業務の効率的な運用の実現が急務となっています。こうした背景のもと、本事業では、2024年度までに公共エリア向けHDマップの仕様やダイナミックマップの構成の策定などを行い、HDマップを搭載した自動運転車両による実証実験を実施しました。2025年度は、こうした成果をもとに以下の3つの技術課題に取り組み、2026年度からの社会実装および国内外への展開を見据えた最終段階へと移行します。
<公共エリアの課題に対する3つの取り組み>
① AI技術により得られる現場状況(動的情報)とHDマップ情報(静的情報)の統合
公共エリアにおいても、突発的な工事や障害物など、自動運転の妨げとなる状況が発生します。そこでAIを活用した画像解析技術から得られる動的情報とHDマップ上の静的な位置情報とを組み合わせることで、人間の判断に近い対応が可能となり、見通しが悪い箇所や通行の判断が難しい状況でも安全でスムーズな自動運転を実現します。これにより、自動運転車両と現場で働く従業員の両者に対し、安全性の向上と業務効率化を支援します。
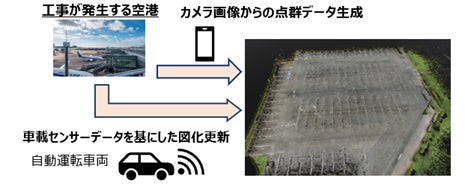
② 持ち込み可能な機材データのみで最新の地図情報を維持できるプロセスの構築
地図情報の変化が多い現場環境では、最新の地図情報を維持・提供することが重要です。通常、地図情報の取得には専用計測車両など大きな計測機材が必要となりますが、そのような機材の持ち込みが特に難しい立ち入り制限があるエリアにおいて、自動運転車両に積載されたセンサー(LiDAR)やスマートフォン等のカメラ画像といった持ち込み可能な機材データのみで地図情報を更新できるプロセスを構築します。これにより、短期間かつ低コストで公共エリア地図の鮮度を維持する運用体制の確立を目指します。
③ 自動運転車両を用いた空港や港湾での実証実験
これまでに開発してきたHDマップおよびダイナミックマップの実用性や信頼性を実環境下で検証すべく、空港や港湾において自動運転車両を実際に走行させる実証実験を予定しています。
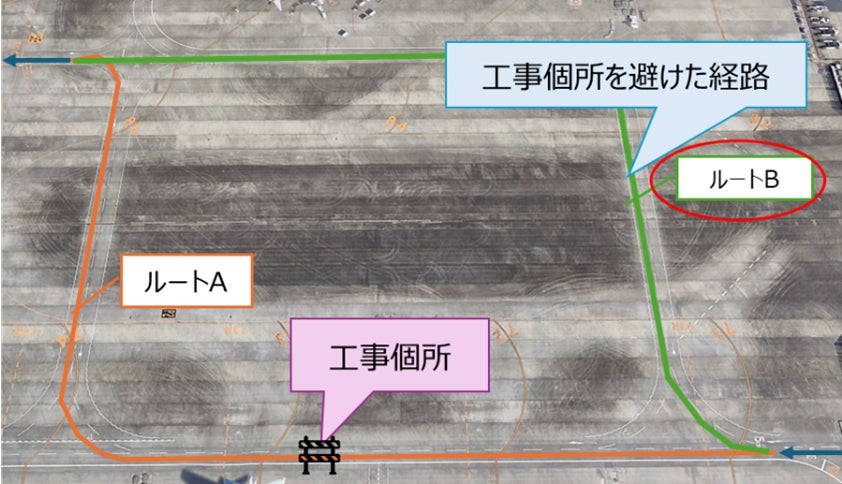
空港では、工事情報など動的な情報を踏まえたリアルタイムな経路探索支援、安全な交差点通過の判断支援などの検証を行います。港湾では、物流動線の中にある制限区域や倉庫周辺を中心に、実際の搬送業務を想定したルート走行によるHDマップの有効性を評価します。
■本事業の社会的意義と展望
●得られた成果の公道への展開
本事業は、空港や港湾といった公共エリアを対象としておりますが、得られた知見や技術成果を公道における自動運転にも展開していくことを目指しています。
●自動運転モビリティ運用を支える基盤としてダイナミックマップを開発・実装
ダイナミックマップは、静的な情報を持つHDマップに準動的/動的な情報を結び付けた次世代の地図インフラです。本事業によりこれを社会実装へつなげることで、自動運転モビリティの安全かつ柔軟な運用を支える基盤としての活用を目指します。
●空港内における自動運転車両向けHDマップの国際標準化および海外展開
空港や港湾における人手不足は、日本国内にとどまらずグローバルな共通課題であることから、当社は本事業の研究開発成果をベースに空港内での自動運転車両向けHDマップの国際標準化に取り組んでいます。今後は並行して海外市場への販売を進め、日本発の地図技術で世界のスマートモビリティ化をリードすることを目指します。
【補足資料】
<2024年度までの取り組み・成果>
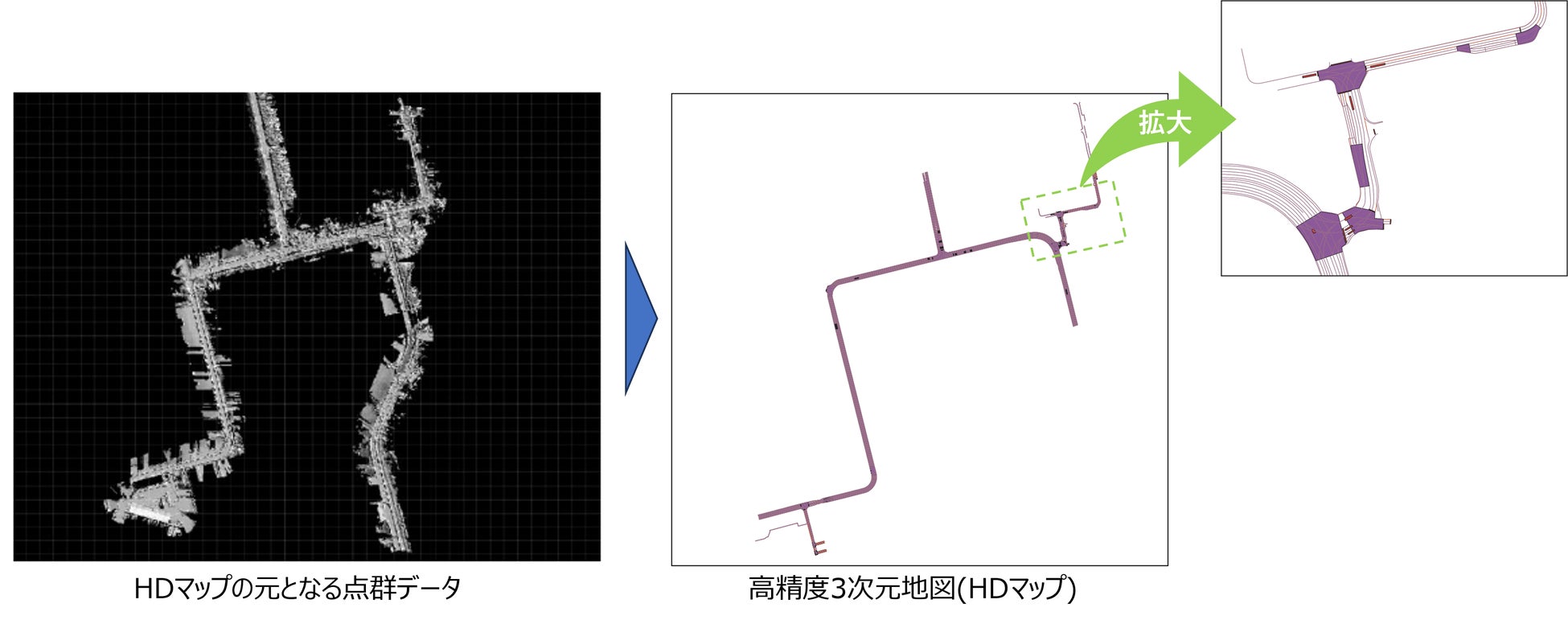
本事業では、2024年度までに公共エリア向けHDマップの仕様の策定、地図属性情報の高度化、ダイナミックマップの元となるダイナミックデータ(準静的/準動的/動的情報)と静的情報(HDマップ)の紐づけ仕様の策定、効率的な地図更新技術の手法を確立させました。これらの技術を社会実装させるための第一歩として、2025年3月には中部国際空港セントレアにて、公共エリア向けHDマップを搭載した自動運転車両による実証実験を実施しました。
【参考リリース】2025年2月27日「中部国際空港セントレアの制限区域内にて高精度3次元地図データ(HDマップ)を搭載した自動運転車両の実証実験を開始」
https://www.dynamic-maps.co.jp/news/news-42/
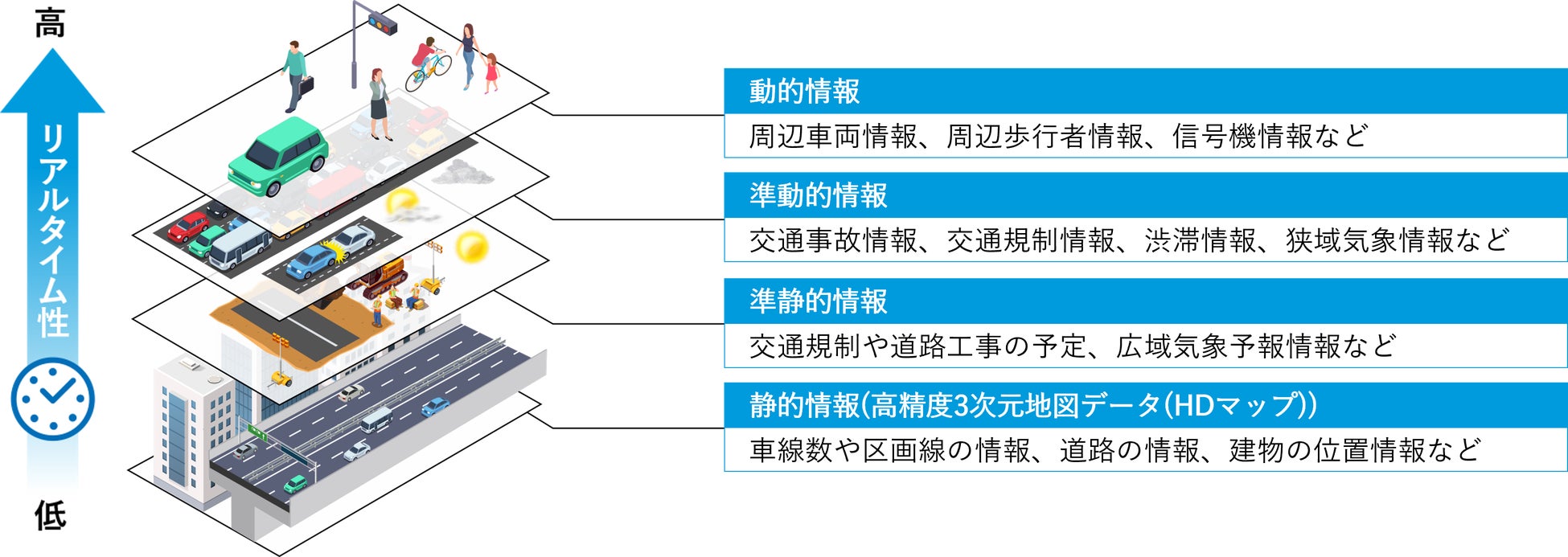
<ダイナミックマップについて>
ダイナミックマップとは、情報のリアルタイム性ごとに4階層に分類された情報を持つ地図データベースの概念を指しています。当社は車線情報、路面情報等をまとめた“静的情報”の基盤となる高精度3次元地図データ(HDマップ)を提供しています。
<ダイナミックマッププラットフォーム株式会社について>
当社は日本政府によるバックアップのもと、国内自動車メーカー10社等の出資により設立されました。日本をヘッドクオーターに、北米・欧州・中東・韓国に拠点を持ち、26ヶ国で事業を展開しています。
現実の世界をデジタル空間に複製する高精度3次元データのプラットフォーマーとして、様々な産業分野におけるイノベーションを支えています。
設立: 2016年6月
本社: 東京都渋谷区
代表者: 吉村 修一
事業内容: 自動運転・ADASをはじめ多様な産業を対象とした高精度3次元データの提供
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像